Изобретение относится к области машиностроения и может быть использовано при создании захватных устройств манипуляторов.
Цель изобретения - расширение технологических возможностей.
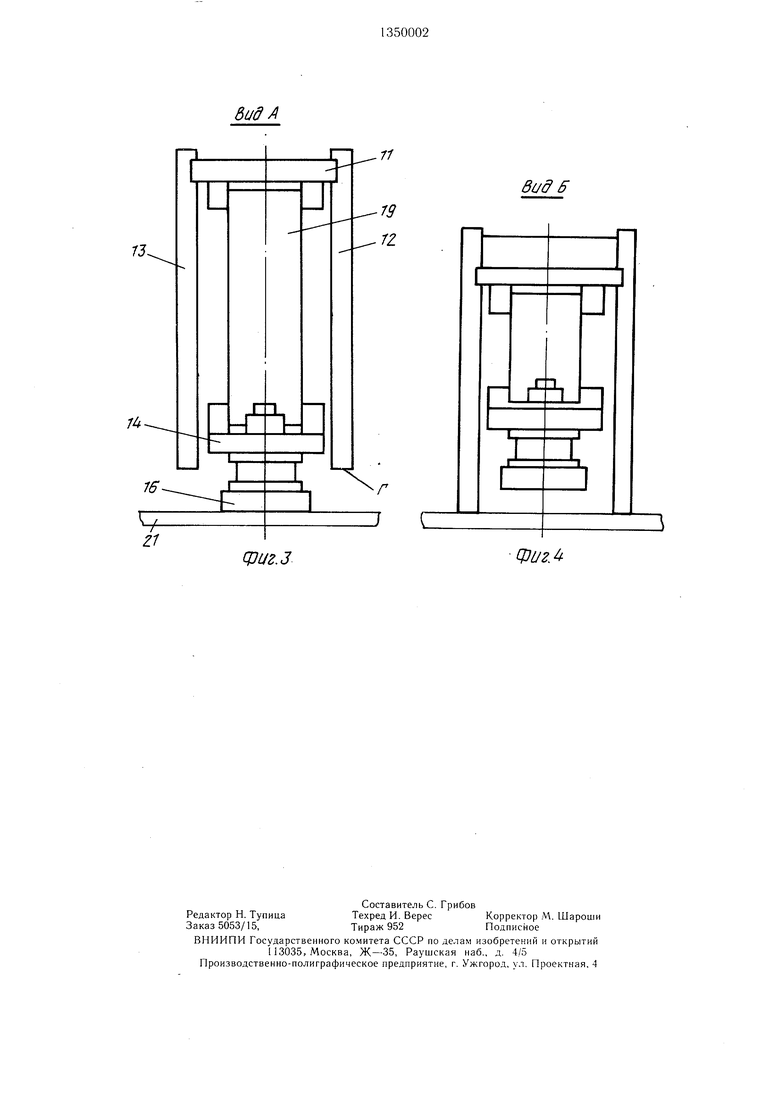
На фиг. 1 изображен схват промышленного рббота, обш,ий вид, момент захвата детали; на фиг. 2 - то же, момент отделения детали; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 2.
Схват укреплен на руке 1 промышленного робота и содержит силовой цилиндр 2 привода губок 3 и 4. Внутри силового цилиндра находятся поршень 5 и возвратная пружина 6, надетая на шток 7. На штоке 7 закреплена также траверса 8, проворачиваю- ш,ая губки 3 и 4 на осях 9 и 10 при выдвижении штока 7. На верхней губке 3 закреплены отсекатель 11 с боковыми пластинами 12 и 13 из немагнитного материала, нагфимер текстолита, в которых для облегчения выполнены окна В.
На нижней губке 4 смонтирована планка 14, на которой с возможностью самоустановки смонтированы на подвесках 15 магниты 16 и демпферы 17, выполненные, например, из поролона. На подвески 15 надеты также тонкие шайбы 18, число и толщина которых могут изменяться в зависимости от требуемой грузоподъемности магнитов. Отсекатель 11 подпружинен относительно планки 14 дополнительно пружиной 19, а величина хода губок регулируется упором 20.
0
5
Схват работает следующим образом.
При разжатых губках схвата поршень 5 находится в крайнем правом положении, магниты находятся ниже рабочей поверхно- сти Г отсекателя. При опускании руки 1 робота магниты 16 .мягко на демпферах 17 и подвеске 15 касаются обрабатываемой детали 21 и захватывают ее.
Для отделения детали от магнитов необходимо подать энергоноситель в рабочую полость. Поршень 5 под действием энергоносителя сжимает пружины 6 и 19 и сближает губки до упора 20. При этом рабочие поверхности Г пластин 12 и 13, воздействуя на деталь, сбрасывают ее с магнитов.
Предлагаемое устройство может монтироваться на губках любого механического схвата и позволяет использовать основное движение губок как вспомогательное при сбросе детали с магнитов.
0Формула изобретения
Схват промышленного робота, содержащий подвижные губки с приводом их перемещения и установленные на наружной пс- вехности губок магниты, отличающийся тем, что, с целью расширения технологических возможностей, магниты установлены на одной из губок, а на другой закреплен отсекатель в виде двух пластин из немагнитного материала, причем рабочие поверхности Q пластин имеют возможность выступать за рабочую поверхность магнитов при сведенных губках, а сами губки подпружинены относительно друг друга и между ними установлен регулируемый упор.
5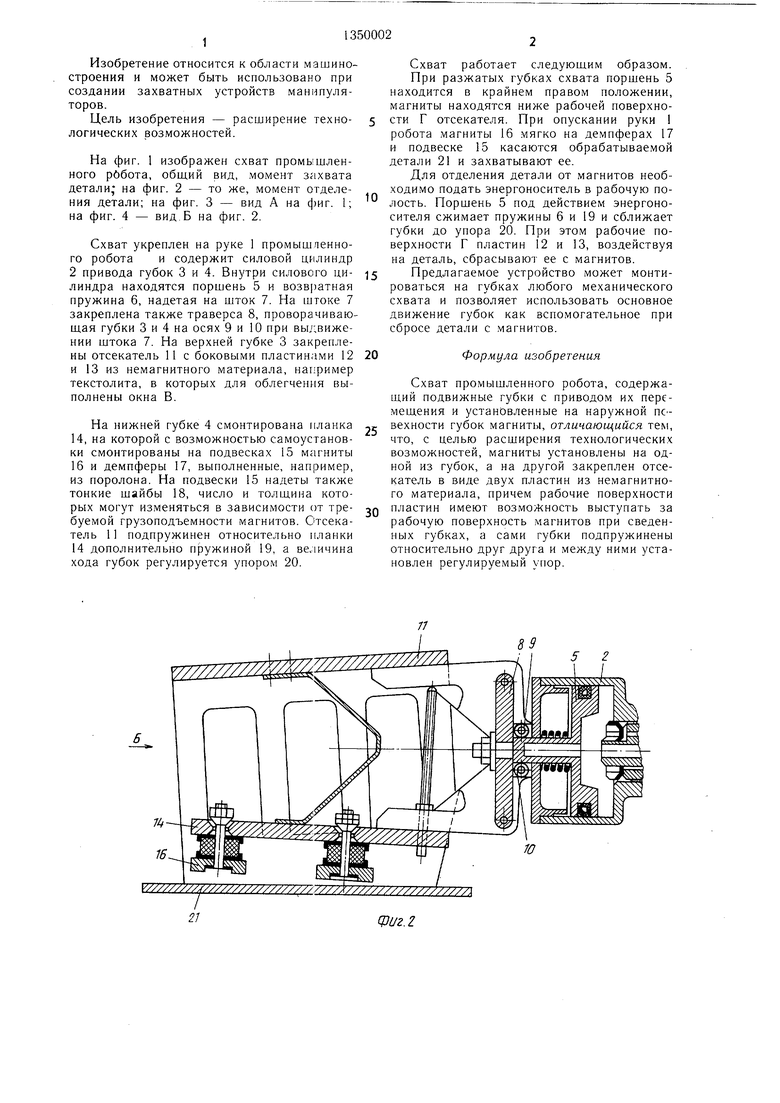
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват | 1987 |
|
SU1407796A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| Захватное устройство | 1982 |
|
SU1007973A1 |
Изобретение относится к области машиностроения и может быть использовано при создании захватных устройств манипуляторов. Целью изобретения является расширение технологических возможностей схва- та за счет использования движения губок 3 и 4 для сбрасывания деталей 21 с магнитов 16. Для этого на верхней губке 3 крепится отсекатель 11 из немагнитного материала, а к нижней губке 4 крепится планка 14 с установленным в ней на подвеске 15 магнитами 16. Отсекатель 11 подпружинен относительно планки 14 пружиной 19, а величина хода губок регулируется упором 20. 4 ил. 7/ 8276 /III (Л оо сд 5 CftUZ.I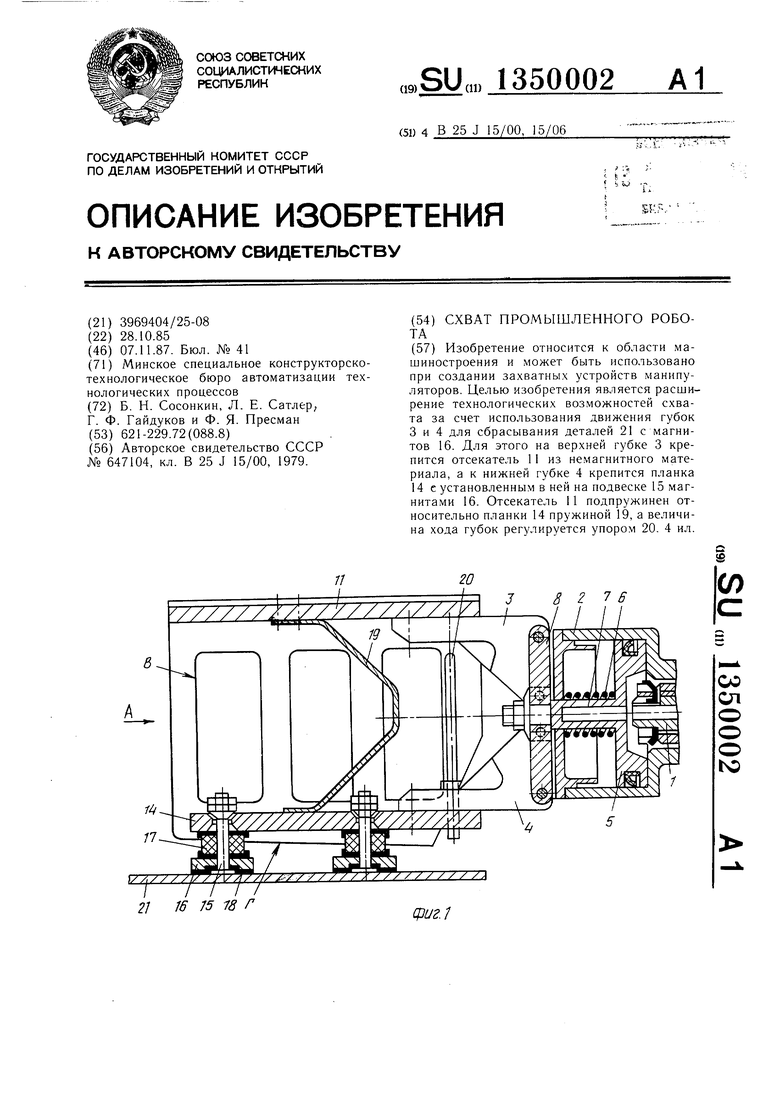
5 2
VUZ.Z
6 ид А
/9
Q
/4.
tfi.
Z1
cpi/г.З
Фиг А
| Захватный механизм манипулятора | 1976 |
|
SU647104A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
