Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для подъема и перемещения штучных грузов. Цель изобретения - пЬвышение надежности работы грузозахватного устройства. На чертеже изображено предлагаемое устройство для штучных грузов, общий вид в изометрин. Грузозахватное устройство содержит раму 1, закрепленную на подвесках 2 крапа, на которой шарнирно установлены захватные рычаги 3, два балансира 4, верхние плечи которых связаны стяжкой 5, а также тяги 6 и дополнительные тяги 7. Тяги 6 и 7 соединены между собой шарниром 8, а с помощью пшрниров 9 и 10 - соответственно с рамой 1 и захватными рычагами 3. К-раме 1 с помощью шарниров 11 прикреплены силовые цилиндры 12, другие концы которых присоединены либо к двум шарнирам 8, либо к шарнирам 13 на другой паре захватных рычагов 3. Устройство работает следующим образом. Рама 1, подвешенная на подвесках 2 крана, устанавливается над грузом 14. При этом захватные рычаги 3 отведены силовыми цилиндрами 12 в крайнее наружное положение. Рама 1 опускается краном, захватные рычаги подводятся под груз 14 и при помошн силовых цилиндров 12 захватывают груз 14. В том случае, если вследствие неравномерной загрузки захватных рычагов произошел перегруз одного из рычагов, то усилие между ними выравнивается путем поворота балансиров 4. При этом шарниры 8, соединяющие тяги 6 и 7 и штоки силовых цилиндров 12, не меняют своего положения в прострапстве, так как тяги 6 и 7, нижние плечи балансиров 4 и захватные рычаги 3 образуют подвижные шарнирно-рычажные параллелограммы, которые позволяют уравновесить усилие поднятого груза без передачи дополнительного усилия на силовые цплиндры. Таким образом, обеспечивается и равномерное загружение всех захватных рычагов и подвесок грузозахватного устройства и нормальная работа силовых цилиндров, маневрирующих рычагами, что позволяет избежать перегрузки рычагов и деформации грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1798288A1 |
| Грузозахватное устройство | 1985 |
|
SU1344719A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Захватное устройство | 1985 |
|
SU1298176A1 |
| Захватное устройство для тарно-штучных грузов | 1980 |
|
SU952719A1 |
ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ, содержащее навешиваемую на грузоподъемную машину раму, шарнирно закрепленные на ней по крайней мере две пары захватных рычагов, кинематически связанных с силовыми цилиндрами их поворота, отличающееся тем. что, с целью повынюния надежности работы, оно снабжено шарннрно закрепленными на раме посредством осей и Н1арнирно соединенными с одной парой захватных рычагов балансирами, шарнирно соединяющей их верхние плечи стяжкой, шарнирно прикрепленными одними концами к захватным рычагам тягами, вторые концы которых Н1арнирно прикреплены к силовым цилиндрам этой пары и шарнирно прикреплены к осям крепления балансиров к раме дополнительными тягами, причем силовые цилиндры всех пар шарнирно прикреплены к раме, а дополнительные тяги вторыми концами прикреплены к шарнирным соединениям силовых цилиндров с первыми тягами, при этом захватные рычаги представляют собой рычаги первого рода.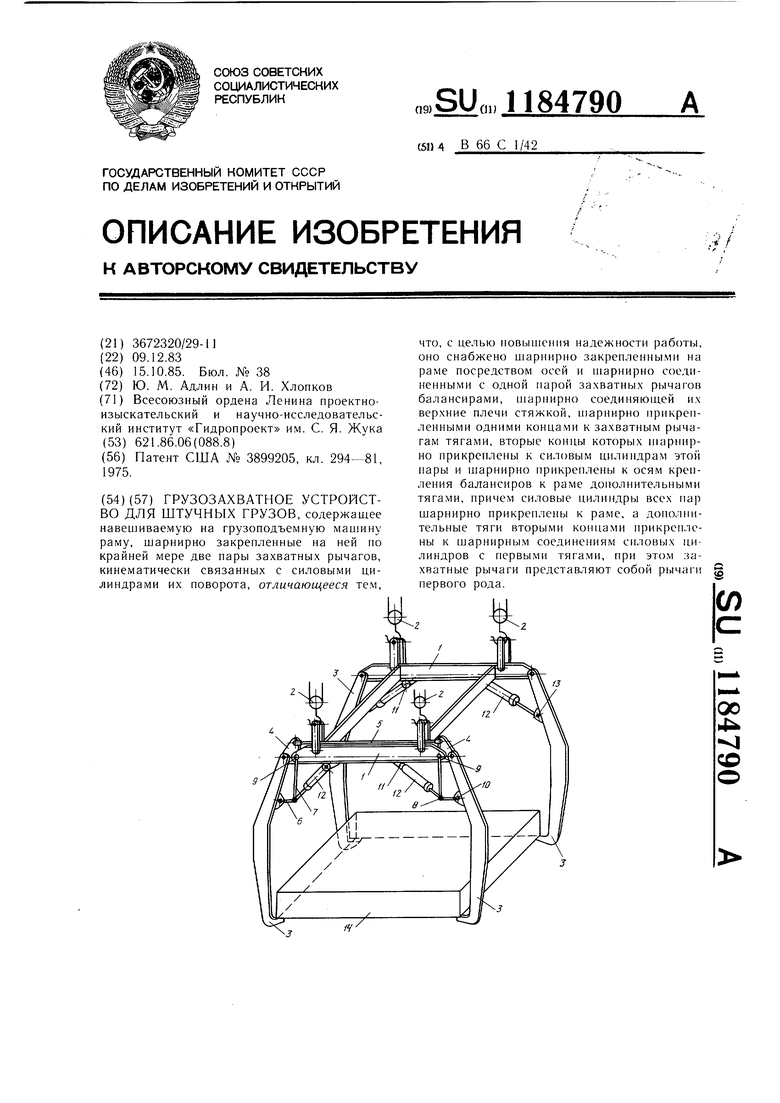
| Патент США № 3899205, кл | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
