Г
i /( пневмосети
Г
(Л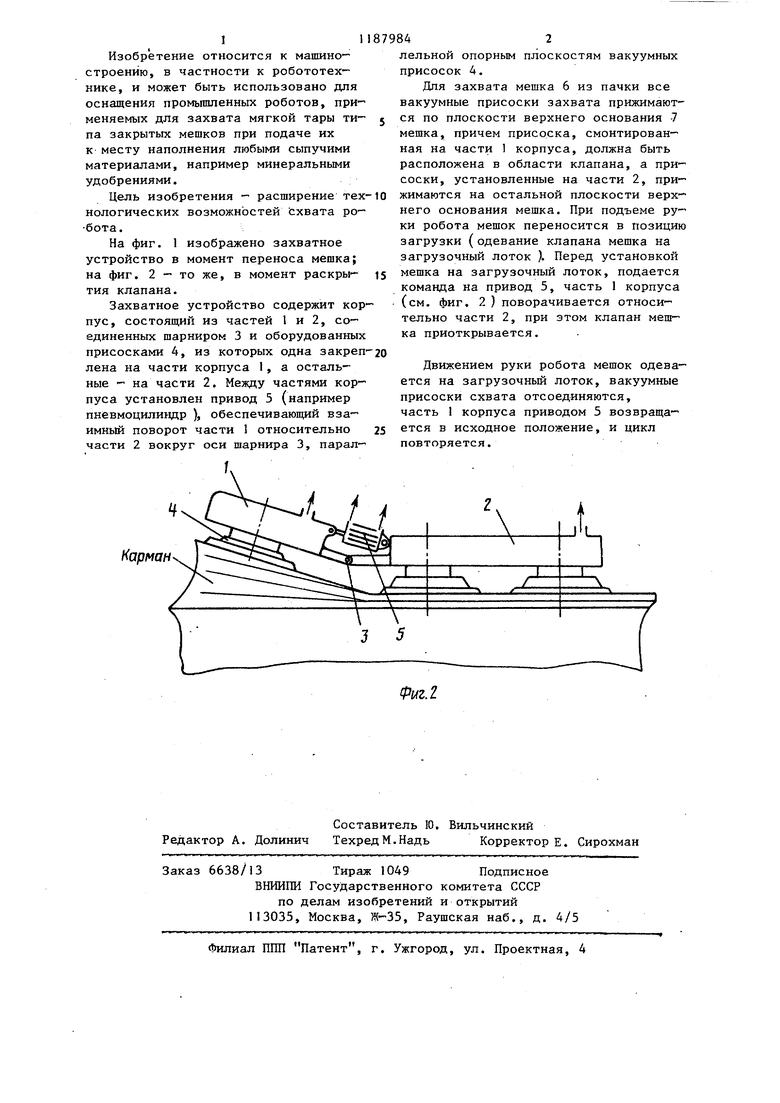
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1720855A1 |
| УСТРОЙСТВО ПОДАЧИ МЕШКОВ МАШИНЫ ДЛЯ НАПОЛНЕНИЯ МЕШКОВ | 2015 |
|
RU2676962C2 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РАСКРЫТИЯ, УДЕРЖАНИЯ И ЗАКРЫТИЯ МЕШКОВ | 2011 |
|
RU2469928C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Схват робота | 1987 |
|
SU1502299A1 |
| Способ укладки консервных банок в тару и устройство для его осуществления | 1987 |
|
SU1413022A1 |
| Захватное устройство | 1983 |
|
SU1199615A1 |
| УСТРОЙСТВО ДЛЯ УПАКОВКИ СЫПУЧИХ ПРОДУКТОВ | 1973 |
|
SU407794A1 |
ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА, содержащее корпус, вакуумные присоски, закрепленные на корпусе, отличающееся., тем, что, с целью расширения технологических возможностей, корпус выполнен по крайней мере из двух частей, соединенных шарниром, ось которого параллельна опорным поверхностям присосок, причем на одной из частей шарнирно закреплен дополнительно введенный привод, выходное звено которого соединено с другой частью.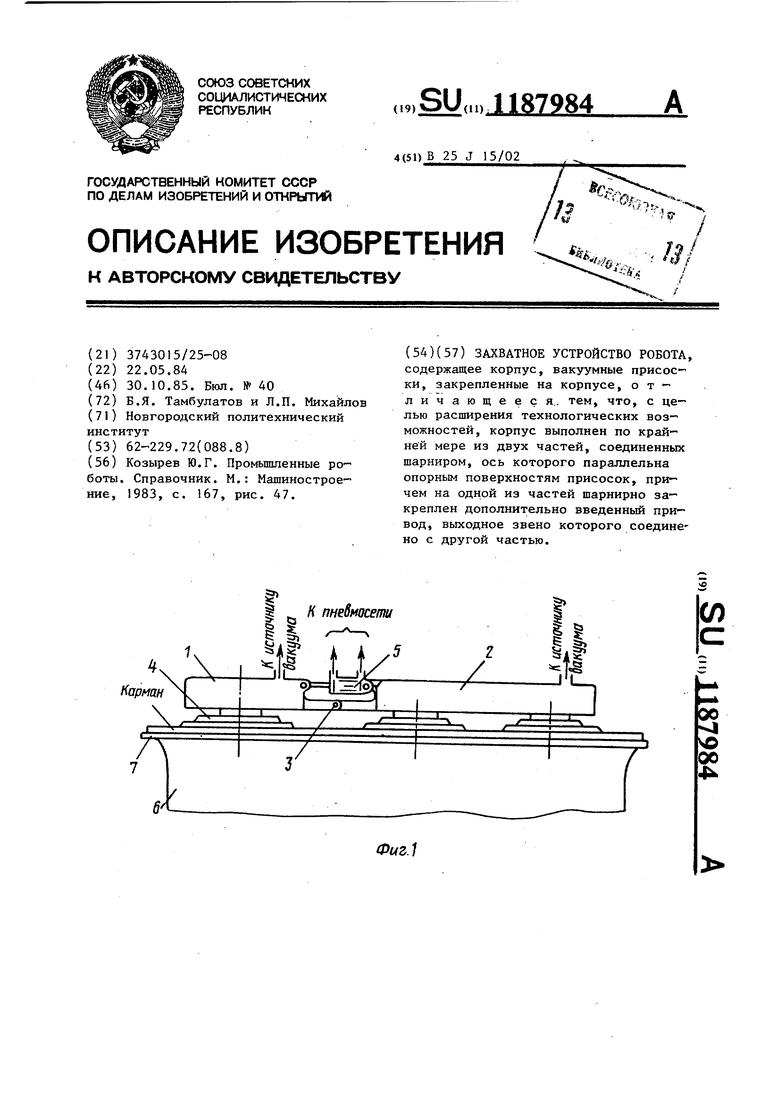
Ф1Аг.1
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано для оснащения промьппленных роботов, применяемых для захвата мягкой тары типа закрытых мешков при подаче их к месту наполнения любыми сыпучими материалами, например минеральными удобрениями.
Цель изобретения - расширение тех нологических возможностей Ьхвата ро- бота.
На фиг. 1 изображено захватное устройство в момент переноса мешка; на фиг. 2 - то же, в момент раскрытия клапана.
Захватное устройство содержит корпус, состоящий из частей 1 и 2, соединенных шарниром 3 и оборудованных присосками 4, из которых одна закреп лена на части корпуса 1, а остальные - на части 2. Между частями корпуса установлен привод 5 (например пневмоцилиьщр ), обеспечивающий взаимный поворот части 1 относительно части 2 вокруг оси шарнира 3, паралНарман
лельной опорным плоскостям вакуумных присосок 4.
Дпя захвата мешка 6 из пачки все вакуумные присоски захвата прижимаются по плоскости верхнего основания -7 мешка, причем присоска, смонтированная на части 1 корпуса, должна быть расположена в области клапана, а присоски, установленные на части 2, прижимаются на остальной плоскости верхнего основания мешка. При подъеме руки робота мешок переносится в позицию загрузки (одевание клапана мешка на загрузочный лоток ). Перед установкой мешка на загрузочный лоток, подается команда на привод 5, часть 1 корпуса (см. фиг. 2 ) поворачивается относительно части 2, при этом клапан мешка приоткрывается.
Движением руки робота мешок одевается на загрузочный лоток, вакуумные присоски схвата отсоединяются, часть 1 корпуса приводом 5 возвращается в исходное положение, и цикл повторяется.
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Прибор для запора стрелок | 1921 |
|
SU167A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
