JZ я 3 W /
Фиг. 3
Изобретение относится к робототехнике, а именно к исполнительным органам манипуляторов и грузозахватных устройств, предназначенных для съема и переноса изделий в процессе обслуживания прессов и. термопласта втоматов.
Целью изобретения является расширение технологических возможностей путем повышения грузоподъемности захватного устройства при использовании его для извлечения изделий, имеющих большие размеры в плане и стенки, перпендикулярные дну пресс-формы. Поскольку сила сопротивления извлечения превышает вес изделия в несколько раз, то использование данного захватного устройства позволяет применять промышленные роботы без таких степеней подвижности, как подъем руки и боковой сдвиг схвата.
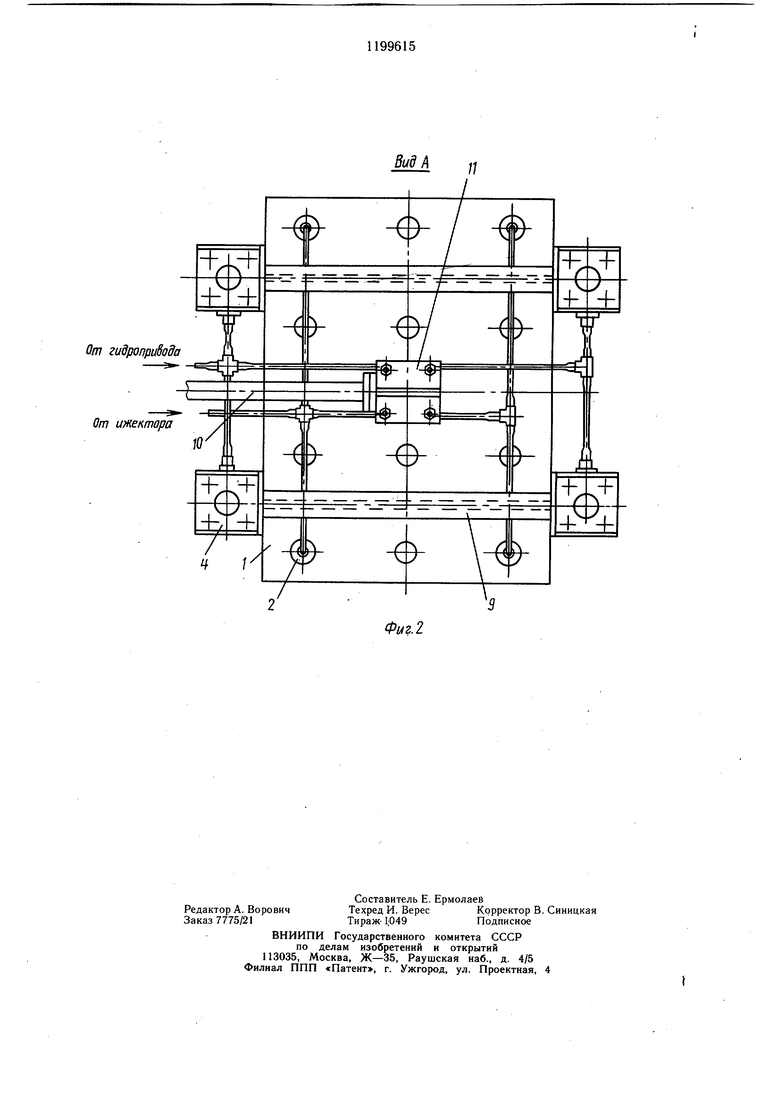
На фиг. 1 изображено захватное устройство, обший вид; на фиг. 2 - вид А на фиг. 1.
Захватное устройство содержит корпус 1, на котором расположены присоски 2 в соответствии с конфигурацией изделия. Присоски 2 снабжены пружинами 3. С корпусом 1 жестко соединены дополнительные кронштейны 4, на которых с помощью стяжек 5 установлены выталкиватели 6. Выталкиватели 6 представляют собой гидроцилиндры, на концах штоков 7 которых установлены резиновые амортизаторы 8. Для повышения жесткости конструкции захватного устройства дополнительные кронштейны 4 попарно связаны стяжками 9.
Подвеска захватного устройства к руке 10 манипулятора включает основной кронштейн П, направляющие штанги 12, пружины 13 и гайки 14. Направляющие штанги 12 жестко связаны с корпусом 1 и имеют возможность перемещаться в отверстиях основного кронштейна II, деформируя пружины 13. Рабочий ход пружины 13 не меньше высоты извлечения изделия 15 из пресс-формы 16. Усилие предварительного
сжатия пружин 13 устанавливается с помощью гаек 14 таким, чтобы суммарное усилие предварительного сжатия пружин 13 в сумме с весом захватного устройства, исключая вес кронштейна 11, было не меньше суммарного усилия сжатия пружин 3 в конце их рабочего хода.
Захватное устройство работает следующим образом.
Рука 10 манипулятора опускает захватное устройство на изделие 15. Присоски 2 прижимаются к поверхности изделия 15 с усилиями, развиваемыми пружинами 3. В полостях присосок 2 эжекторами (не показано) создается разряжение, с помощью которого изделие 15 захваты5 Бается присосками 2. После достижения в полостях присосок 2 разряжения, необходимого для извлечения изделия 15 из прессформы 16, в верхние полости гидроцидиндров выталкивателей 6 (по сигналу системы
Q управления) подается под давлением рабочая жидкость. Штоки 7 выталкивателей 6 опускаются вниз, упираясь амортизаторами. 8 в пресс-форму 16, а захватное устройство поднимается вверх с удерживаемым изделием 15. При этом рука 10 манипулятора и основной кронштейн 11 остаются неподвижными, а пружины 13 сжимаются. Во время извлечения изделия 15 из прессформы 16 на руку 10 манипулятора действует усилие, максимальное значение которого равно суммарному усилию сжатия пружин 13 в конце их рабочего хода. Усилие устанавливается заранее и меньшим, чем предельная грузоподъемность манипулятора. При выходе штоков 7 до нижнего предельного положения рука 10 манипулятора поднимается вверх и пружины 13 возвращают корпус 1 в исходное положение. После подъема руки 10 в крайнее верхнее положение щтоки 7 возвращаются рабочей жидкостью в исходное положение. Затем изделие 15 переносится манипулятором, например, в накопитель.
От гидропривода
От ижектора
Вид А
П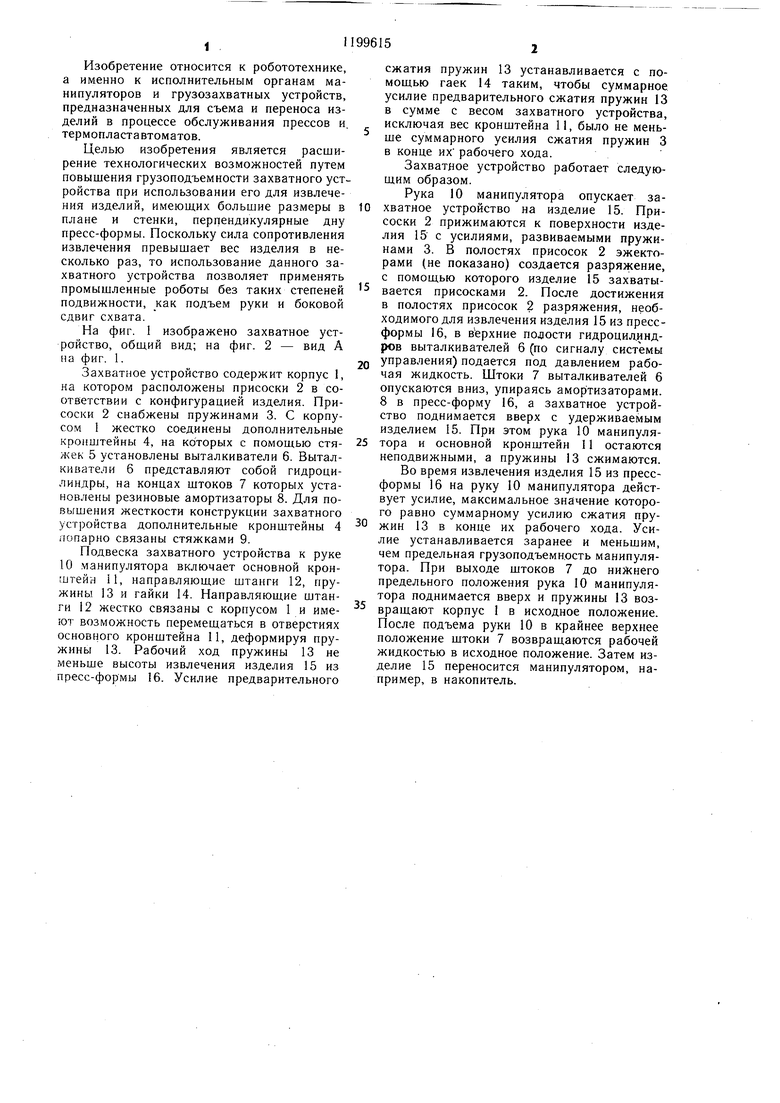
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство захватное | 1985 |
|
SU1278209A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Головка манипулятора | 1990 |
|
SU1811485A3 |
| Вакуумное захватное устройство | 1984 |
|
SU1215999A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Захватное устройство | 1986 |
|
SU1393627A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Устройство для переноса изделий на агрегате для изготовления грампластинок | 1978 |
|
SU787179A1 |
| Способ укладки консервных банок в тару и устройство для его осуществления | 1987 |
|
SU1413022A1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, эжектор, кронштейн и подлружиненные вакуумные присоски, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено выталкивателями, выполненными в виде гидроцилиндров, штоки которых снабжены амортизаторами, причем выталкиватели установлены на корпусе, несуш,ем подпружиненные вакуумные присоски и установленном на кронштейне с возможностью линейного перемещения.
| Вакуумный схват | 1977 |
|
SU637248A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
