Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов.
Цель изобретения - расширение технологических возможностей схвата и повышение надежности его работы.
На фиг. 1 изображено устройство, об- ш,ий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - один из возможных фиксаторов, вариант.
ние тактильных датчиков 14 с контактами 15 губок 2. После размыкания контактов 15 у всех губок 2 с датчиками 14 через блок управления подается команда на поступление (слив) сжатого воздуха через каналы 5 12 (11), что обеспечивает перемеш,ение поршней 8 и замыкание шариков 9 с поверхностями конических втулок 10 и губок 2 и соответствует самоустановке их по профилю детали 16. После самоустановки губок 2
Адаптивный схват содержит рычаги 1 и Q подается команда на дальнейшее перемеще- губки 2, установленные посредством прижи- ние рычагов 1 с направляюшими 4, кото- мов 3 в направляюш,их 4 и управляемых фиксаторах 5.
На рычагах 1 закреплены направляюшие 4, с которыми посредством прижимов 6 и
пружин 7 соединены фиксаторы 5. Фикса- 15 вода перемещения рычаго в I. Последователь торы 5 снабжены поршнями 8, в которыхность срабатывания тактильных датчиков 14
расположены шарики 9, конические втулки 10 и каналы 11 и 12, соединенные с каналами блока управления привода перемещения рычагов I. На неподвижной части схвата закреплены ограничители 13. На направляющих 4 установлены тактильные датчики 14, а на губках 2 и фиксаторах 5 контакты 15.
Устройство работает следующим образом. В исходном положении рычаги 1 схвата 25 ложении после разжима рычагов 1 посред- разведены,губки 2 ограничителями 13 сдвину- ством ограничителей 13 переместить губки 2 ты к центру схвата. Посредством блока управления сжатый воздух поступает (сливается) через каналы 11 (12), поршни 8 фиксаторов 5 обеспечивают гарантированный зазор между шариками 9 и коническими 30 втулками 10. Фиксаторы 5 пружинами 7 сдвинуты к центру схвата, датчики 14 замкнуты на контактах 15 губок 2.
рые сжимают пружины 7 до замыкания контактов 15 фиксаторов 5 и датчиками 14, что соответствует заданному усилию захвата и определяет команду на останов припри размыкании их с контактами 15 губок 2 определяет команду на перемещение детали 16 после ее захвата в зону обработки или сброс в тару. После перемещения детали 16 в зону обработки подается команда на разжим рычагов 1. После размыкания контактов 15 фиксаторов 5 с датчиками 14 подается команда на перемещение поршней 8 фиксаторов 5, что позволяет в исходном пов первоначальное положение.
Формула изобретения
Адаптивный схват промышленного робота, содержащий блок управления и рычаги с захватными губками, выполненными в виде пальцев, имеющих возможность перемещения вдоль их продольной оси относительВ процессе работы схват робота переме- но рычагов, отличающийся тем, что, с целью щается в зону захвата детали. С установлен- 35 расширения технологических возможностей и ной скоростью производится закрывание ры- повышения надежности работы, на губках
чагов 1 схвата, при этом прижимами 3 и 6 обеспечивается неиз.менное положение губок 2 и фиксаторов 5 относительно направляющих 4. При контакте губок 2 с поверхностями детали 16 рычаги 1 с направляющими 4 и фиксаторами 5 продолжают перемещаться, при этм происходит размыка40
установлены управляемые фиксаторы, подпружиненные относительно рычагов, на которых установлены тактильные датчики, имеющие возможность взаимодействия с контактами, установленными на губках и фиксаторах, причем тактильные датчики связаны с блоком управления.
подается команда на дальнейшее перемеще- ние рычагов 1 с направляюшими 4, кото-
вода перемещения рычаго в I. Последователь ность срабатывания тактильных датчиков 14
рые сжимают пружины 7 до замыкания контактов 15 фиксаторов 5 и датчиками 14, что соответствует заданному усилию захвата и определяет команду на останов при вода перемещения рычаго в I. Последователь ность срабатывания тактильных датчиков 14
ложении после разжима рычагов 1 посред- ством ограничителей 13 переместить губки 2
при размыкании их с контактами 15 губок 2 определяет команду на перемещение детали 16 после ее захвата в зону обработки или сброс в тару. После перемещения детали 16 в зону обработки подается команда на разжим рычагов 1. После размыкания контактов 15 фиксаторов 5 с датчиками 14 подается команда на перемещение поршней 8 фиксаторов 5, что позволяет в исходном положении после разжима рычагов ством ограничителей 13 перемести
в первоначальное положение.
Формула изобретения
установлены управляемые фиксаторы, подпружиненные относительно рычагов, на которых установлены тактильные датчики, имеющие возможность взаимодействия с контактами, установленными на губках и фиксаторах, причем тактильные датчики связаны с блоком управления.
Фиг 2
Составитель Г. Максимова
Редактор Л. ПчолинскаяТехред И. ВересКорректор А. Обручар
Заказ 1257/18Тираж954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
I 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4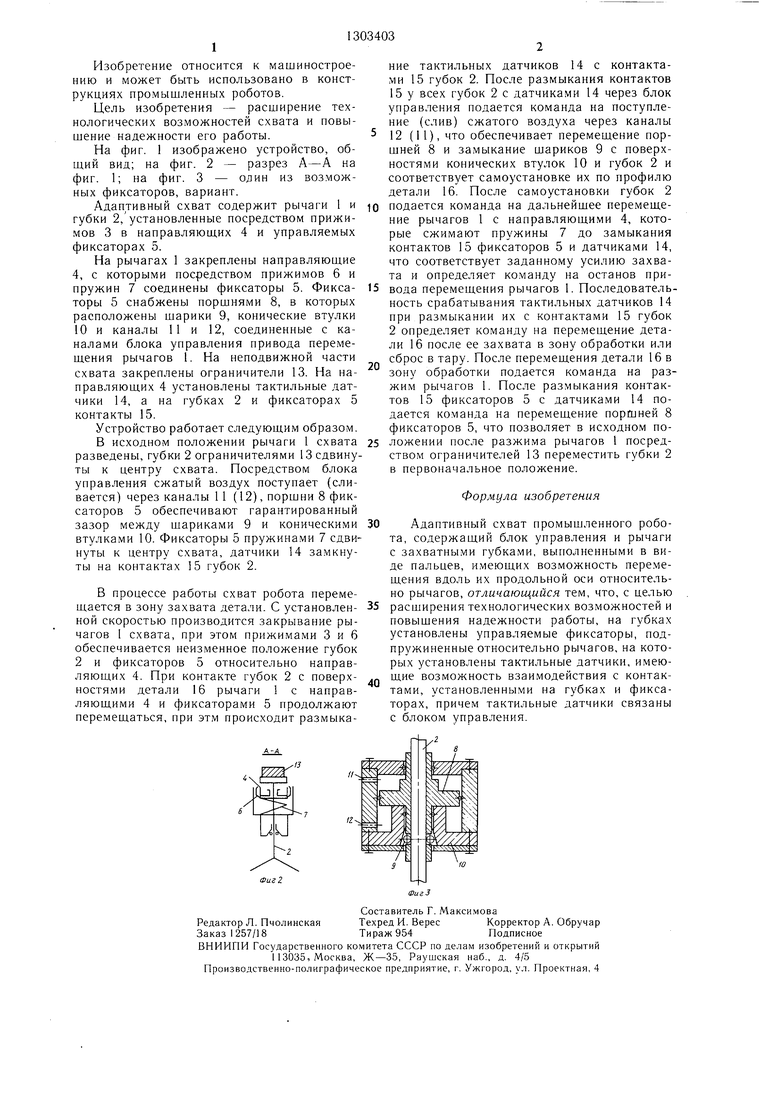
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
| Устройство для управления адаптивным роботом | 1988 |
|
SU1541556A2 |
| Схват | 1982 |
|
SU1060469A1 |
| Захват | 1986 |
|
SU1397280A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Измерительный схват промышленного робота | 1988 |
|
SU1634489A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Устройство для управления адаптивным роботом | 1984 |
|
SU1188700A1 |
Изобретение относится к области машиностроения и может быть иснользовано в конструкциях промышленных роботов. Целью изобретения является расширение технологических Еюз.можностеи и новышение надежности работы. Для этого на губках 2 установлены управляемые фиксаторы 5, под- иружиненные относительно рычагов I. На рычагах расположены тактильные датчики 14, имеющие возможность взаимодействия с контактами 15, установленными на губках 2 и фиксаторах 5, причем тактильные датчики 14 связаны с блоко.м ynpaB. ie- ния. При зажиме детали 16 рычаги 1 с губками 2 устанавливаются по профилю детали, воздействуя при этом на деталь с минимальным уси.чием, а после вк.чючеиия управляемых фиксаторов деталь зажимается с заданным усилие.м захвата, которое одинаково для всех захватных рычагов. 3 и. ь S (Л со о ОО о со ;4
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
