11зобретение относится к радиотехнике и может быть использовано в сис темах цифровой обработки информации Цель изобретения - повышение точности фильтрации. На чертеже йриведена структурная электрическая схема цифрового рекурсивного фильтра. Цифровой рекурсивньм фильтр содержит входной и выходной сумматоры 1 и 2, первую группу умножителей 3, первую многоотводную линию 4 задержки, вторую многоотводную линию 5 задержки, вторую группу умножителей 6 первьй и второй дополнительные сумма торы 7 и В, первый и второй дополнительные умножители 9 и 10. Цифровой рекурсивный фильтр работает следующим образом. Передаточная функция предлагаемог фильтра в общем виде AU) i-1 Представим коэффициенты .реального фильтра S; а; +ог; ; bj b +/3j. ; где а; и bj- точные значения коэффициентов;о(; и / : - ошибки представления .коэффициентов конечным числом разрядов. Ошибкиы; и j считаются статистически независимь1ми случайными величи нами с равномерными распределениями Г О 8 Т в интервале -jгде о - величина младшего разряда. Перед началом вычислений выходног сигнала Jj(n) в многоотводных линиях 4 и 5 задержки вводятся соответствую щие начальные значения переменных. В каждьй дискретный момент времени пТ где п - номер такта, Т - период дискретизации, на вход цифрового рекурсивного фильтра поступает текущее значение входного сигнала х(п), кото рое во входном сумматоре 1. складывается со значениями сигналов с выходо первой многоотводной линии 4 задержки, умноженными на соответствующие коэффициенты bj (j 1, .., -1) в первой группе умножителей 3. С каждо го из выходов второй многоотводной линии 5 задержки сигналы проходят через соответствующую вторую группу умножителей 6-, умножаясь на коэффициенты Ь, (j -} + 1,..., N) , и поступают на входы первогр дополнительного сумматора 7, кроме одного сигнала,который поступает непосредственно с выхода последнего отвода первой многоотводной линии 4 задержки. Выходной .сигнал первого дополнительного сумматора 7 в первом дополнительном умножителе 9 умножается на коэффициент К и с его выхода подается на один из входов входного сумматора 1. Выходной сигнал входного сумматора,1 непосредственно подается на вход первой многоотводной линии 4 задержки и через первую группу умножителей 3 на один : из входов выходного сумматора 2. Одновременно сигналы с выходов первой многоотводной линии 4 задержки через первую группу умножителей 3 по-. еле умножения на коэффициенты aj (,. . /й-1) поступают на входы выходного сумматора 2. С первого выхода второй многоотводной линии 5 задержки сигнал непосредственно поступает на вход второго дополнительного сумматора 8, а с остальных выходов четыре соответствующие умножители второй группы умножителей 6, в которых умножаются на коэффициенты а- (1 |Ы+1J. . ,N) . Выходной сигнал второго дополнительного сумматора 8 умножается на коэффициент втором дополнительном умножителе 10 и поступает на один из входов выходного сумматора 2. Для удобства рассмотрения без ограничения общности примем, что с увеличением индексов суммирования значения коэффициентов аj и Ьисходной передаточной функции (1) убывают по модулю. Предлагаемый цифровой рекурсивный фильтр описывается передаточной функцией я 2ia.-4t.s. ° .(Ц )- п:-г , где Кд| и К, - множители, которые точно представляются даннь1у числом разрядов разрядной сетки цифрового рекурсивного фильтра, причем |Ко, и |Кв} 1. В первую сумму числителя передаточной функции (2) входят только те члены исходной передаточной функции (1) коэффициенты которьк по модулю больше | Кд, , а во вторую сумму числителя все остальные члены. При этом коэффициенты а j(, ..., -1) представляют собой округленные значения соот ветствующих коэффициентов aj, а коэф фициенты aj(i |U 1,.. ,N), входящие во вторую сумму, определяются путем округления отношений а;/К до требуе мого числа раэрядов. Аналогично коэффициенты первой суммы знаменателя bj(,.,, -1; по модулю больше 1 Kg | и пруедставляют (собой округление значения соответствующих коэффициент(эв bj ,а коэффициент;ты b(j 5+1 ,.. . ,N) определяются также путем округления отношений bj/К„да требуемого числа разрядов. Выбор коэффициентов |К11(1и |К|-С1 из условий Ка(| . . „обеспечивает, с одной стороны, то, что коэффициенты а . и Ь- будут по модулю меньше единиць, а с другой стороны, позволяет исключить в каждой из сумм, умножаемых на множители и Kg , по одной операции умножения, так как коэффициенты а. и Ьд обращаются в единицы. Последнее дает возможность избежать увеличения числа операций умножения, несмотря на введение множителей Кд и Kg. Уменьшение погрешностей, вызываемых как ошибками представления коэффициентов, так и ошибками округления произведений, основывается на том, что при умножении приближенного числа на точный множитель К, абсолютная предельная погрешность изменяется в |к1 раз, а ее среднеквадратическое значение в К раз. Среднеквадратич.еская ошибка частот ной характеристики предлагаемого цифр вого фильтра, обусловленная погрешностями представления коэффициентов,имеет вид ((N-4c.(N-0)-C,4 Jl e(E)BU) Z A(g)ft(7-) Js в (%)8Пг-) г . величины fu и представляют собой со- ответственно число членов первых сумм числителя и знаменателя передаточной функции (3), а F - величина младшего разряда чисел. Среднеквадратическое значение результирующей ошибки округления на выходе предлагаемого цифрового рекурсивного фильтра определяется выражением(N-p,f|c,.,,,.;jj,(4) A(Z)A(g-) 8Сг)В(г-) Т Для фильтра-прототипа среднеквадратическая ошибка частотной характеристики записывается как а результирующая погрешность округления, вызываемая ошибками округления произведений, характеризуется величиной дисперсии, определяемой выражением . n fiMCj NC V Из сравнения выражений (3) и (5), (4) и (6) следует, что при |Ка| 1 и погрешности предлагаемого фильтра будут(существенно меньше аналогичных погрешностей фильтра-прототипа. Таким образом, предлагаемый фильтр обеспечивает повьш1ение точности , фильтрации благодаря уменьшению погрешностей, обусловленных как ошибками представления коэффициентов, так и ошибками округления произведений. При этом указанное повышение точности цифрового фильтра достигается при минимально возможном числе арифметических операций и операций задержки.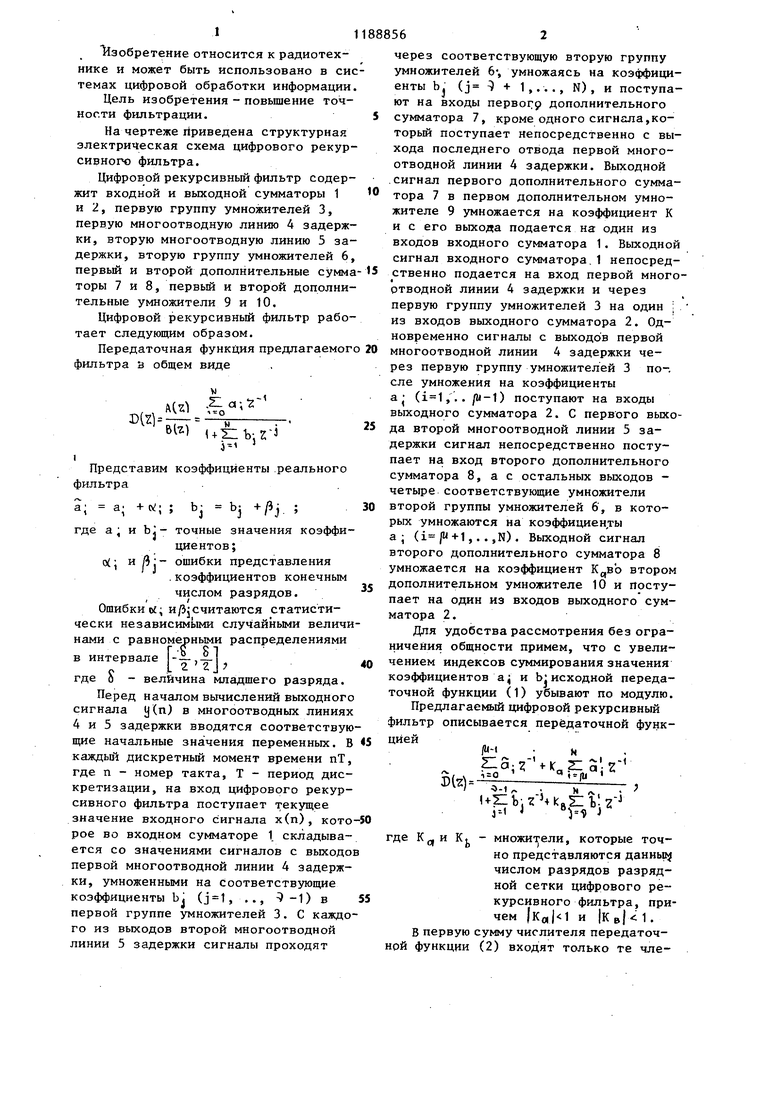

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1991 |
|
RU2006936C1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1992 |
|
RU2057364C1 |
| Рекурсивный цифровой фильтр | 1988 |
|
SU1656672A1 |
| Устройство следящего аналого-цифрового преобразователя | 1987 |
|
SU1522405A1 |
| Цифровой фильтр | 1975 |
|
SU590749A1 |
| СПОСОБ СЖАТИЯ ЛЧМ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2722000C1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1994 |
|
RU2097828C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| Рекурсивный цифровой фильтр | 1983 |
|
SU1171993A1 |
| Полосовой цифровой фильтр | 1987 |
|
SU1492451A1 |

ЦИФРОВОЙ РЕКУРСИВНЫЙ ФИЛЬТР, содержащий две последовательно соединенные многоотводные линии задержки и первую и вторую группы умножите лей, вход первой многоотводной линии задержки подключен к выходу входного сумматора и входу первого умножителя первой группы умножителей, выход которого подключен к первому входу выходного сумматора, выход первой многоотводной задержки подключен через второй умножитель первой группы умножителей к второму входу выходного сумматора, а каждый отвод первой многоотводной линии задержки через соответствующие 1-йи
| Цифровой фильтр | 1982 |
|
SU1059669A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Введение в цифровую фильтрацию | |||
| Под ред | |||
| Р | |||
| Богнера и А | |||
| Константини диса | |||
| -М.: Мир, 1976, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
