Изобретение относится к механическим передачам и может быть использовано в машиностроении.
Цель изобретения - повышение несущей способности.
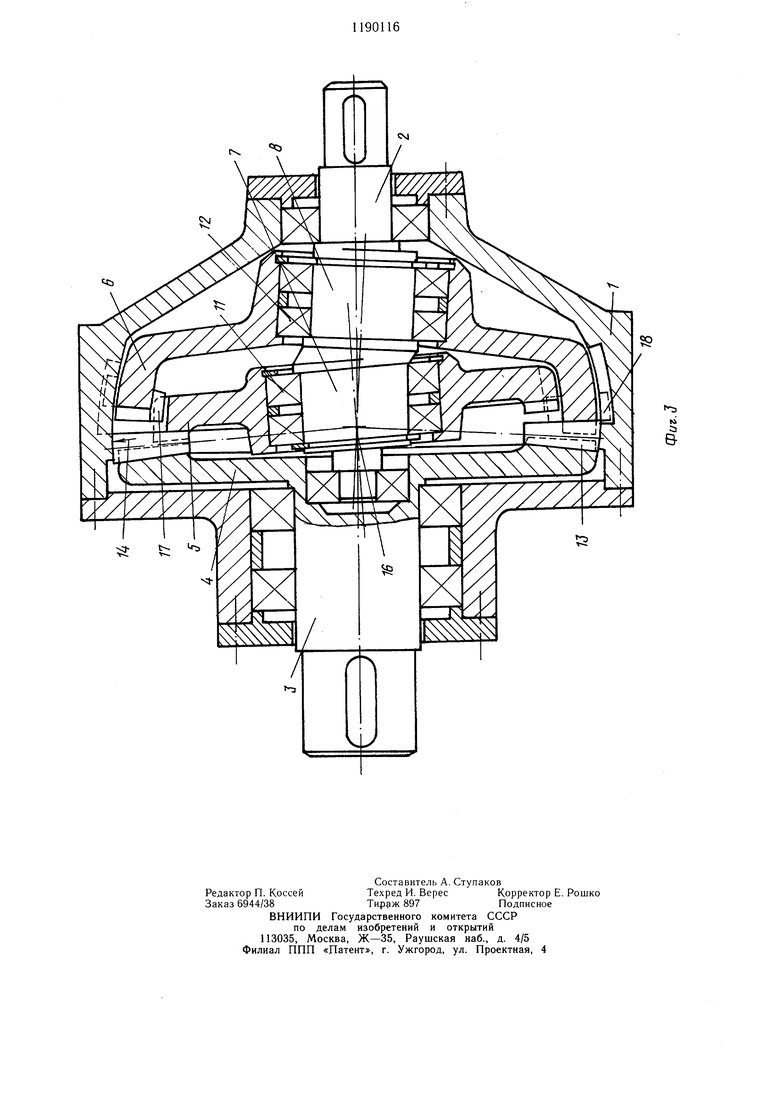
На фиг. 1 показана планетарная прецессионная передача; на фиг. 2 и 3 - то же, варианты.
Передача содержит корпус 1, установленные в нем ведущий 2 и ведомый 3 валы, центральное зубчатое коническое колесо 4, жестко связанное с ведомым валом 3, два установленные один в другом сателлита 5 и 6, представляющие собой конические зубчатые колеса. Все конические зубчатые колеса выполнены с прямолинейным профилем зуба внешнего зацепления. Сателлиты 5 и 6 установлены на эксцентриках 7 и 8 с противоположными эксцентриситетами посредством кулачков 9 и 10 и подшипников И и 12. Между зубьями центрального конического колеса 4 и сателлитов 5 и 6 установлены свободно конические цевки 13, которые имеют на большем торце сферическую поверхность. Сателлиты 5 и 6 имеют внутренние и наружные контактные поверхности, а часть корпуса выполнена со сферической дорожкой 14 и взаимодействует с наружной контактной поверхностью сателлита 6 и со сферической поверхностью цевок 13. Эксцентрики 7 и 8 жестко связаны с ведущим валом 2, а сателлиты 5 и6 зафиксированы от вращения посредством штифтов (фиг. 1 и 2) и своими внутренними наклонными криволинейными поверхностями 15 (фиг. 1) взаимосвязаны с кулачкам 9 и 10. Можно также (фиг. 2) поверхности 15 сателлитов 5 и 6 выполнить сферическими с центром радиуса кривизны, расположенным в центре каждого из эксцентриков 7 и 8. Кроме того, сателлиты 5 и 6 (фиг. 3) можно установить посредством подщипников 11 и 12 на разных кривошипах 7 и 8 с противоположным наклоном, геометрические оси которых пересекаются с осью ведомого вала в центре прецессии 16. Сателлиты 5 и 6 между собой, а также наружный сателлит 6 и корпус 1 в этом случае могут быть взаимосвязаны зубчатыми венцами 17 и 18.
Эксцентриситеты е эксцентриков 7 и 8 и положение последних относительно центра прецессии 16 выбраны такими, чтобы вщзываемая ими амплитуда прецессионного дрижения сателлитов обеспечивала вход и выход из зацепления с одной стороны зубьев сателлитов 5 и 6 с цевками 13, а с другой стороны - цевок 13 с центральным коническим колесом 4.
Передача работает следующим образом.
При вращении ведущего вала 2 (фиг. 1) эксцентрики 7 и 8 посредством подшипников 11 и 12 и кулачков 9 и 10 сообщают сател литам 5 и 6 прецессионное движение. Кулачки 9 и 10 своими наклонными криволинейными поверхностями находятся в постоянном контакте с наклонными криволинейными поверхностями 15 сателлитов 5 и 6. Выполнение эксцентриков 7 и 8 с противоположными эксцентриситетами е приводит к зацеплению зубьев сателлитов 5 и 6 с цевками 13 с одной стороны, и цевок 13 с ведомым колесом 4 с другой стороны, в двух диаметрально противоположных зонах. Так как сателлиты 5 и 6 между собой, а также
сателлиты 6 и корпус 1 взаимосвязаны штифтами 14, они будут соверщать прецессионное движение без вращения. При этом цевки 13 соверщают сложное движение, включающее прецессионное движение и вращательное движение вокруг геометрической оси центрального конического колеса. Далее вращательное движение цевок 13 передается центральному колесу 4 и ведомому валу 3.
Соотношение чисел цевок 13 и Зубьев колес может быть следующим
5Zs Ze
Z4 Z5±2 ,
где Zs и 2 6-числа зубьев сателлитов 5 и 6; 4 - число зубьев центрального колеса 4;
Zij-число цевок 13. В передаче (фиг. 2) контактные поверхности сателлитов 5 и 6 и кулачков 9 и 10 выполнены сферическими с центром радиуса кривизны, выполненным в центре каждого из
J эксцентриков 7 и 8. Такое выполнение контактных поверхностей приводит к разгружению подщипников 11 и 12, а также подщипников ведущего вала от осевой нагрузки. Реактивная осевая нагрузка зацеплена, полностью воспринимается корпусом 1 через сферические контактные поверхности сателлитов 5 и 6 и корпуса 1.
В передаче (фиг. 3) сателлиты расположены на различных кривощипах 7 и 8 с противоположным наклоно; 1, оси которых пересекаются с осью ведомого вала 3 в центре прецессии 16. При вращении ведущего вала 1 сателлиты 5 и 6, установленные посредством подщипников 11 и 12 на наклонных кривошипах 7 и 8, совершают прецессионное движение и входят в зацепление с цевками 13 аналогично как и в передачах, представленных на фиг. 1 и 2. Сателлиты 5 и 6 соверщают прецессионное движение без вращения, так как они между собой, а также наружный сателлит и корпус взаимосвязаны зубчатыми венцами 17 и 18.
Kl
:a
e
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный механизм | 1982 |
|
SU1044868A1 |
| Планетарная прецессионная передача | 1986 |
|
SU1453092A1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| Самоцентрирующий патрон | 1983 |
|
SU1158302A1 |
| Радиально-поршневой гидромотор | 1983 |
|
SU1105685A1 |
| Планетарная прецессионная передача | 1987 |
|
SU1474362A1 |
| Двухступенчатая прецессионная передача | 1982 |
|
SU1285234A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2019 |
|
RU2712714C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ | 2002 |
|
RU2244181C2 |
| Планетарная прецессионная передача | 1980 |
|
SU1015162A1 |

ПЛАНЕТАРНАЯ ПРЕЦЕССИОННАЯ ПЕРЕДАЧА, содержащая корпус, установленный в нем ведомый вал, жестко связанное с ним центральное коническое зубчатое колесо, два конических сателлита, взаимодействующих с зубчатым колесом, имеющих равное число зубьев и установленных один в другом, отличающаяся тем, что, с целью повышения несущей способности, на внутренней поверхности корпуса выполнена сферическая дорожка, а передача снаб жена установленными между зубьями центрального колеса и сателлитов коническими цевками, имеющими на большем торце сферическую поверхность, контактирующую со сферической дорожкой корпуса. (Л О5
| Волновая зубчатая торцовая передача | 1976 |
|
SU684226A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Планетарная прецессионная передача | 1976 |
|
SU734465A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
