Изобретение относится к прокатному производству и может быть использовано на мелкосортных станах, оборудованных клапанным сбрасывателем.
Цель изобретения - уменьшение потерь металла в обрезь за счет обеспечения стабильности исходного положения клапанов.
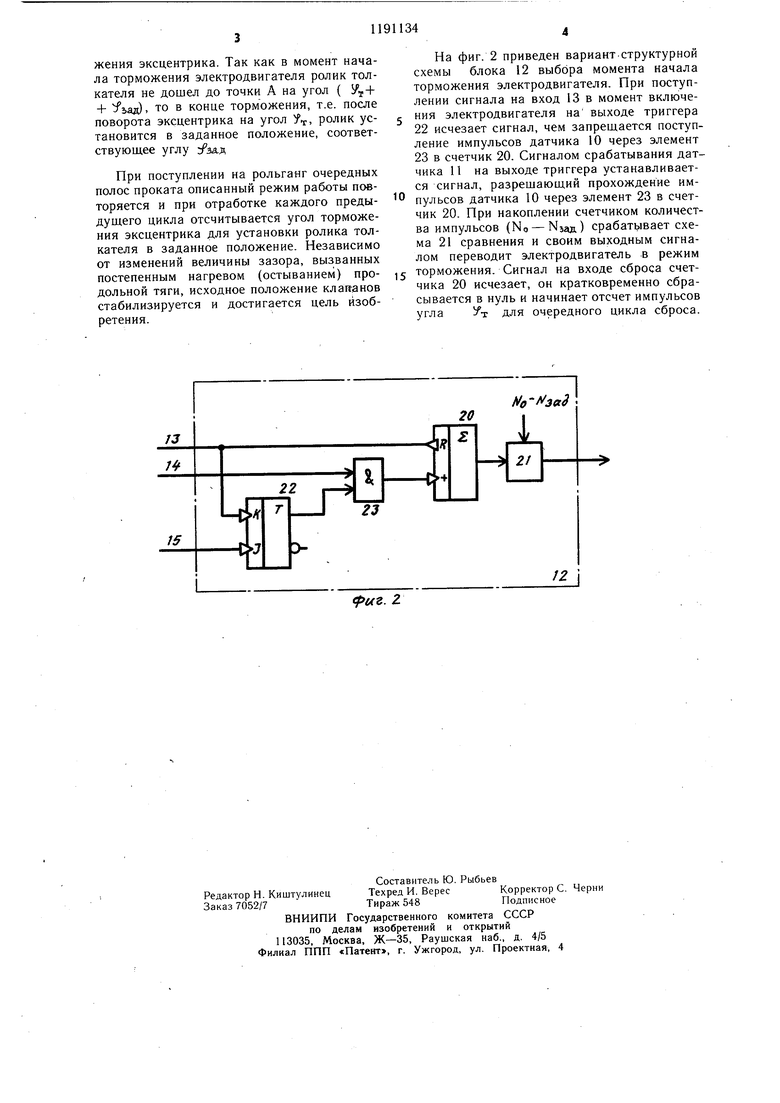
На фиг. 1 приведена блок-схема устройства управления сбрасывателем; на фиг. 2 - один из вариантов реализации блока определения момента начала торможения электродвигателя.
Эксцентриковый привод сбрасывающих клапанов 1, снимающих полосу 2 с рольганга 3 для перекладывания ее на холодильник 4, состоит из роликового толкателя 5, продольной тяги 6, эксцентрика 7 и электродвигателя 8. Устройство управления сбрасывателем содержит блок 9 управления электро двигателем, датчик 10 импульсов угла поворота эксцентрика, датчик 11 начала торможения полосы (например, датчик положения установленный на уровне несущей поверхности рольганга) и блок 12 определения момента начала торможения электродвигателя. Вход 13 блока 12 соединен с выходом блока
9,вход 14 блока 12 - с выходом датчика 10, вход 15 блока 12 - с выходом датчика 11, а выход блока 12 - с отключающим входом 16 блока 9. Устройство содержит также путевой выключатель 17, избиратель 18 режима работы, а также включающий вход 19 блока 9 управления электродвигателем.
Блок 12 (фиг. 2) состоит, например, из счетчика 20, схемы 21 сравнения состояния счетчика с заданным значением, JK-триггера 22 и элемента 23 И. Динамический К - вход триггера соединен с динамическим инверсным входом сброса счетчика 20 и подсоединен к выходу блока 9, динамический .J-вход триггера подсоединен к датчику 11, первый вход элемента 23 соединен с выходом триггера 22, второй вход - с датчиком
10,а выход - с счетным входом счетчика 20, выход схемы 21 соединен с отключающим входом блока 9.
В исходном положении электродвигатель 8отключен, клапаны 1 установлены ниже несущей поверхности роликов рольганга 3 с зазором $ , а ролик толкателя занимает такое положение относительно эксцентрика 7, при котором он находится, например, на позиции 5. Положением избирателя 18 устройство подготовлено к первому (контрольному) циклу сброса: при этом к отключающему входу 16 блока 9 управления электродвигателем подключен путевой выключатель 17.
При поступлении полосы проката на рольганг по включающему входу 19 поступает ко манда на включение сбрасывателя, на выходе блока 9 появляется сигнал и электродвигатель 8 начинает поворачивать эксцентрик в направлении, указанном стрелкой. Клапаны поднимаются, полоса, двигаясь в направлении, указанном стрелками, тормозится и сбрасывается на холодильник. После этого клапаны движутся вниз к исходному положению. При их опускании точка В эксцентрика вступает в контакт с роликом толкателя 5. В этот момент срабатывает путевой выключатель 17, сигнал на выходе блока 9 исчезает и электродвигатель тормозится. От момента срабатывания путевого выключателя 17, т.е. от момента начала торможения электродвигателя в блоке 12, начинают суммироваться импульсы датчика 10.
После остановки эксцентрика первый
(контрольный) цикл сброса заканчивается. При этом в блоке 12 накоплено количество N-j импульсов датчика 10, соответствующее углу ff поворота эксцентрика от момента подачи команды на его торможение до полной остановки, а ролик толкателя контактирует, например, с точкой С эксцентрика. Затем оператор переключает избиратель 18 в режим стабилизации исходного положения клапанов: при этом выход блока 12 соединяется с отключающим входом 16 блока 9.
При поступлении новой полосы проката на рольганг по входу 19 в блок 9 поступает команда на очередное включение сбрасывателя. На выходе блока 9 появляется сигнал и эксцентрик начинает поворачиваться. Сигналом с выхода блока 9 запрещается поступление импульсов датчика 10 в блок 12.
В момент, когда клапаны проходят зазор § и ролик толкателя 5 вступает в контакт с точкой А эксцентрика, срабатывает датчик 11 начала торможения полосы и его сигналом разрешается поступление импульсов датчика 10 в блок 12. Их накопление в блоке 12 продолжается до момента соблюдения равенства
N-t-f NTe« No-Ньад (1)
где}1,„текущее количество импульсов датчика 10, поступившее в блок 12 от момента срабатывания датчика 11 в течение поворота эксцентрика на угол
y-«(NTeii );
Яо- количество импульсов датчика 10, соответствующее одному обороту эксцентрика, т.е. его повороту на угол
iPo 25r(No yo);
Язад-количество импульсов датчика 10, соответствующее заданному углу Узал Уза) который определяется заданной величиной зазора SВ тот момент, когда условие (1) соблюдается, на выходе блока 12- появляется сигнал, содержимое блока 12 стирается, а по отключающему входу 16 блок 9 переводит электродвигатель в режим торможения. В процессе торможения электродвигателя в блоке 12 осуществляется отсчет количества импульсов NTP, соответствующее углу торможения эксцентрика. Так как в момент начала торможения электродвигателя ролик толкателя не дошел до точки А на угол ( У,,+ + ьад), то в конце торможения, т.е. после поворота эксцентрика на угол УТ, ролик установится в заданное положение, соответствующее углу г/здд
При поступлении на рольганг очередных полос проката описанный режим работы повторяется и при отработке каждого предыдущего цикла отсчитывается угол торможения эксцентрика для установки ролика толкателя в заданное положение. Независимо от изменений величины зазора, вызванных постепенным нагревом (остыванием) продольной тяги, исходное положение клапанов стабилизируется и достигается цель изобретения.
На фиг. 2 приведен вариант структурной схемы блока 12 выбора момента качала торможения электродвигателя. При поступлении сигнала на вход 13 в момент включения электродвигателя на выходе триггера
22исчезает сигнал, чем запрещается поступление импульсов датчика 10 через элемент
23в счетчик 20. Сигналом срабатывания датчика 11 на выходе триггера устанавливается сигнал, разрешающий прохождение импульсов датчика 10 через элемент 23 в счетчик 20. При накоплении счетчиком количества импульсов (No - Njafl) срабатьшает схема 21 сравнения и своим выходным сигналом переводит электродвигатель в режим
торможения. Сигнал на входе сброса счетчика 20 исчезает, он кратковременно сбрасывается в нуль и начинает отсчет импульсов угла УТ для очередного цикла сброса.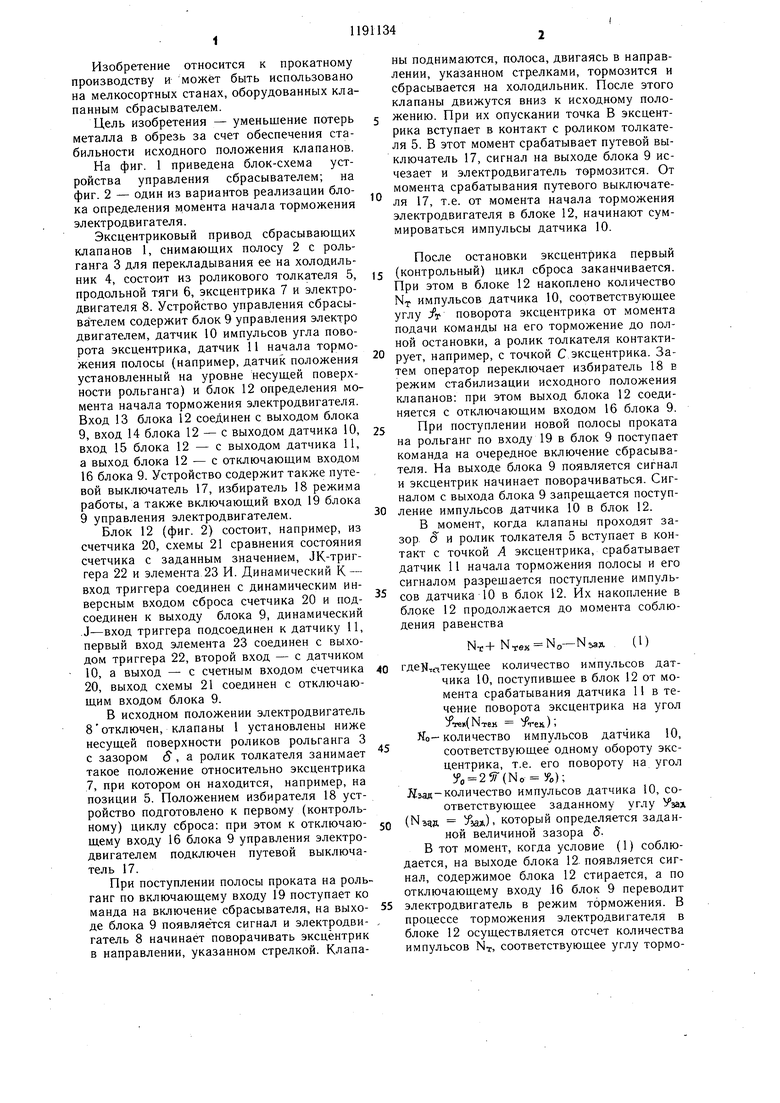
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сбрасывателем полосы на холодильник мелкосортного стана | 1984 |
|
SU1196055A1 |
| Устройство для выравнивания полос проката на холодильнике мелкосортного стана | 1986 |
|
SU1378969A1 |
| В П Т Б | 1973 |
|
SU395139A1 |
| Способ управления безупорным остановом перемещаемой заготовки и устройство для его осуществления | 1986 |
|
SU1407603A1 |
| Устройство для управления набором пакета полос перед ножницами сортового стана | 1984 |
|
SU1219194A1 |
| Устройство для раскроя пакета полос мелкосортного проката | 1981 |
|
SU969471A1 |
| Клапанный сбрасыватель проката | 1978 |
|
SU774652A1 |
| Устройство управления перемещением пакета полос мелкосортного проката при порезке на стационарных ножницах | 1983 |
|
SU1109207A1 |
| Подводящий рольганг холодильника прокатного стана | 1986 |
|
SU1337164A1 |
| Устройство для настройки и контроля зазора между валками пилигримового стана | 1981 |
|
SU997878A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ КЛАПАННЫМ СБРАСЫВАТЕЛЕМ ПОЛОСЫ С РОЛЬГАНГА МЕЛКОСОРТНОГО СТАНА, содержащее эксцентриковый привод и электродвигатель с блоком управления, отличающееся тем, что, с целью уменьшения потерь металла в обрезь за счет обеспечения стабильности исходного положения клапанов, в устройство введены датчик импульсов угла поворота эксцентрика, датчик начала торможения полосы, избиратель режима работы, путевой выключатель и блок определения момента начала торможения электродвигателя, входы которого раздельно соединены с выходом блока управления электродвигателем и выходами указанных датчиков, а выход через избиратель режима работы соединен с входом блока управления электродвигателем, второй вход избирателя режима работы соединен с путевым выключателем.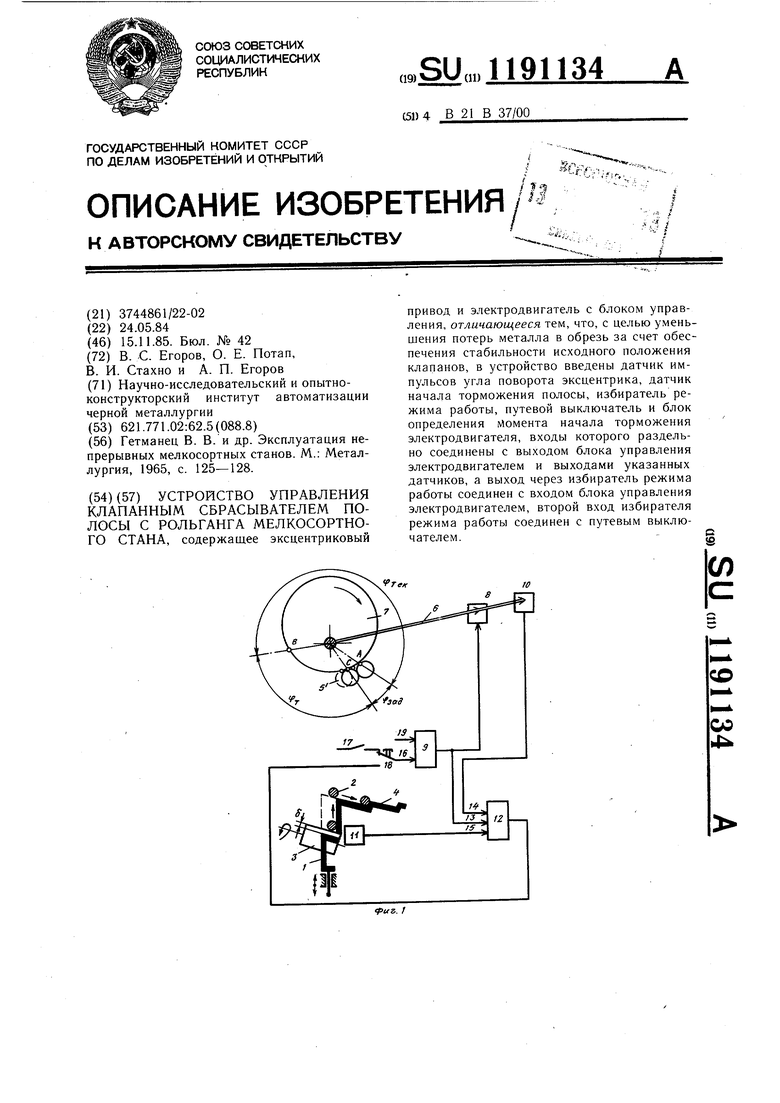
i
2/
/г i
| Гетманец В | |||
| В | |||
| и др | |||
| Эксплуатация непрерывных мелкосортных станов | |||
| М.: Металлургия, 1965, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
