1
И:и)бретеиие относится к прока гному производству и может быть нсно.ихчонано дли управления nepeMcmeniCM пакета полос на заданное расстоянпе неред отделсш ем от него пачки прутков станпопарпыми нож-нпцами мелкосорт11О1Ч) стана.
Известно устройство управления перемещением 1гроката, содержап1.ее схему управления приводом рольганга, датчнк HMiiy.ibcoii Г1еремен1,ения проката, датчпк скорости и 6;ioK отсчета заданно1о неремеп1ения. Известное устройство обеспечивает точпость перемещения проката за счет перехода к пониженной (ползучей) скорости и копне ;1еремеп1епия 1.
Это устройство обладает педостаточными (|п пкпиопальпыми возможностями, так как движение проката с ползучей скороспдо грул, организовать ни ме;1косортпом cTfUie, где рольганг оборудован аспнхро1пп 1м приводом ,
Наиболее близким к изобретению ио тех1П1ческой сущности и достигаемому результату является устройство унравления иеремен1епием п;)оката, соде)жа1цее схему управления П1)иводом рольгаши с триггером запуска, уира15леиия п)ир,одом иожпиц, датчик нмиу.тьсов ) переме1нения проката, пос;1едова1е.1ьпо соедипен1И)1е датчик скорости проката и pc.ie скорости, задатчик е.чичины не)еме;цения проката, счетчик ) иеремеи1сния н)окагм, э.томеит срав1 ення зад. нерсмеи1е1и-1я с тек HUiM, выход которого соединен с от к,; ю чающим входом тргитера запуска и (входом сб)оса счетчика 2J.
При использонани -: нзь;естного устройства включают привод po,ii :-ain-a и ;трабатывают цикл псремеи1е1 ия проката.. Иа п|)едыдуп1ем пикле запоминаю нуть тормо/кеиия и но.тучепную информацию ис11о;1ь:5у|(гг д.1я установ.тения коорд.инаты торможения на нос,1едую1цем iiHK.ic. При о -работке каж;1.ого |ривод ролы-а ь-а вь ходнт на устаиовивн1уюся CKOpocrij. i. с. на каждо.м 11,икл( иачал)Ная скорост) ( постоянна. .Это снижает тех;-1о; огичсские возможности устройства и гех случаях, ко1да перед тормо.жеиием привод jjOJUiIaina не 31,1ходит на устан(ляпмпу1ося скор(кть, что имеет место, нанрн.ме), при отработке сравпител1дю небо,льн1и. перемещений проката порезке его на е аппопариых ножницах ме.Пчоеортпого cTiina, где величина псре.мещепия (длина прутка) по требования.м заказа может из.меняться от 4 до 2-и метров.
Цель из)брете ия - раси1иренне Iexнологических возможностей устройства.
Постав.теннаи цель достигается тем, что в устройство унрав.тения перемещением накета полос мелкосортного проката при порезке па стационарных ножницах, содержание ехе.му управле1П1я приводом ро.чьгаига с блоком запуска, ехе.му управления приводом ножн.иц, дат;ик перемещения пакета, 1оеледовательно соединенные датчик скороети накета и ре.те скорости, счетчик неремеи1еиия пакета и блок сравнения, выход ксггорого еоедине с отключающим входом блока зануска и входом счетчнка нере ;ен1ения накета, задатчик величины перемещения накета, выход которого соеднпеп с вторым входо.м б,чока сравнения, веденГ)1 ное.тедовательно соединенные блок В1,1числения отношения неремепгения накета прп торможепии к 1ере.мещению пакета при разгоне и блок памяти, прнче.м первый и второй входы блока вь чиеле1П1я OTHOHICпия соедине П)1 с В1 1ходами блока зануска, третий вход соединен е выходом датчика иеременхения накета, четвертый с выxo;U)M реле скорости, а нятый -- с вь;ходом схемы у||ран:1ения приводом ножниц, второй вход б.:|(жа намятн еоединен с выходом реле скорости, третий - с выходом схе.мы управления приводом иожни, а выход б.тока намятн соединен е управляющим входом ечетчнка нереме1ценл1я пакета.
И а че5)теже приведена б.:1ок-ехема пред.л а е м о Io у стр о йст ва.
Ус.ройство управ.пения нере.меп;.еннем пакета 1 полос мелкоеортного проката к стационар п 1м ножница.м 2 содержит ехе.му 3 унравления .1,ом ро,чьганга 4, Т)иг|-ер 5 этой схемы, ехему 6 уирав:1ения прпводом ножниц, датчик 7 и.миульсов текущего перемещепия пакета, кинематически евяза1-:пый, isanpHMep, е ролико.м рольгаша, нос.чедовательно соединенные датчик 8 ско)ости пакета и реле 9 екоросли. ечет 10 текунюго перемещения пакета, зал,атилп 11 величииы пере.мешепии пакета, блок 12 еравнения заданно1О перемещения с . вГ)1ход которого соединен с отк. оча1О1п. входом ) три|гера 5 запуска и входом сброса счетчика 10, блок 14 В1з числе-няя отношеиия перемещения пакета ири тормо.же1-:ип к перемепгенню пакета npii разroiie, блок 15 памятг, раздельные входы И) 20 блока 14 еоответствепно еоедппепы с датчиком 7, выходами триггера о заиуска, выходом реле 9 скорости и схемой 6, нход|)1 21 и 22 блока 15 еоответетвенпо соедгшены с выхо..1,ом ре.те 9 ско)остп и схемой 6, а выход блока 15 е чправляюuuiM 15ходом 23 счетчика 10. Кнопки 24 26, лте.мент И.ЛИ 27 и трипер 5 входят в еоС1ав б.тока 28 запуска. Кнопка 25 входит и состав схемы 6 унравления приводом пожпиц.
Принцип )аботы устройства основан на слсдуюн1нх особенностях процесса нереMeHiei-шя пакета lia заданное расстояние .
Перемен1ение, накета при на.пнчии фаз 5аз1Ч)иа и торможения выражаслся так: зад Sp и S - перемещения пакета при раз1О 1е и торможении.
1гс:ли при разгоне доетигается. n.-nqMiMep, скорость иеремешения Vi , то
Vi- aptp, Vi aTtT,
1 о и t ускорения при разгде
гоне и торможении и соответствуккние длительности 1()аз.
Отсюда
I S:- Ьт
г оГ а Ф
где j3 - параметр, характеризующий отношение ускорений при перемещении пакета.
В свою очередь,отнощение перемещений пакета выражается так:
ST Vii-iaii
pif apliJ- ар i;
. как Р. то Sp( 1-ьР ) 5з2д.
Такнм образом, перед отработкой заданного перемещепня Sjaa необходимо знать параметров. Он может быть онреде;1ен при пробпом (кажд(П предыдущем) перемен1ении н учтен при отработке заданного (каждого нос,1едук)Н1е1о) перемещения.
В соответстЕ5ии с этим принципом устройство работает с.ледмощим образом.
В исходно.м по.юже.ини пакет 1 но.лос проката устанав.Пвается на рольганге 4. Перед порезкой пакета на пачки нрутков его перемещают к ножницам 2 для зачистки начала пакета. Это перемещение считают пробным, так как жестких требований по точности остановки пакета д,1Я зачистки нет и эта операция осунгествляется оператором ножниц врхчную.
Кнопкой 24 оператор включает трщтер 5 запуска, выходпым сигналом триггера включается схе.ма 3 управления приводо.м рольганга и пакет 1 начинает перемещаться к ножнинам 2. При включении триггера 5 запуска па входе 17 б.тока 14 вычисления OTHOineiniH пе)емеп1ения пакета при . торможении к пере.мен|,енню пакета при разгоне появляется разрешающий сигпал. Импульсы текущего 11еремеп1.ения пакета от датчика 7 неремеп1ения пакета поступают на вход И) б.юка 14 вычисления отнон1ения перемещения пакета при торможении к перемепкнию пакета прп раз1оне. В б.юке 14 начинается отсчет пути Sp разгона пакета. Ec.iH при пакет 1 выходит па установи вн1ук)ся скорость, срабатывает pe;ie 9 скорости, вход которого соедипе -; с выходом датчика 8 скорости пакета. Выходпой сигнал реле 9 поступает на вход 19 блока 14 и отсчет пути разгона пакета в блоке 14 прекращается. В случае, если при движении пакета установивп1аяся скорость не достигается, то нуть Sp разгона отсчитывается в блоке 14 вплоть до момента начала тор.може11ия пакета.
OiieiKiTop iui/(iinu по своему усмотренпю nepeBo;uiT рольганг в режпм тс пюженпя таким об)азом. -нобы нри остап( п.акета на :-1ожницах прои.икчти зачистно рез.
кои Ь отк.ночает Ipiiriep п (на OTK.Tio4aioiueNi uxo.ie 13 Т)иггера появ.1яется сигна, и триггер перебрасьн ается). Переход триггера в с)тк.1юченнос состояние вызывае отк/почепне cxeNH i 3 уирав.чсння
0 приводом, рольганга, пакет 1 начпнаег гормозпться, а на входе 18 б.кжа 14 нояв,1яется соответствук)Н1ий cHina.i. Этим сигналом разрешается отсчет в блоке 14 нутн ST торможения пакета и вычис.тепне отнощенпя : .
В омент остановки пакета на пожпицах пепед зачистпым ре.юм в б.токе 14 вычислено искомое отнои1ение.
Кнопкой 25 оператор включает 6 управления приводом ножниц, производится
0 зачистной рез и образовавшаяся обрезь отводится от ножниц. При срабатывании схемы 6 и на входе 20 б.юка 14 н входе 22 блока 15 за 1ом1и1а Н1я отпоикмщя / iioHiiляется сигиа.. )тим сигна.юм вычисленное значение / нз бло1ча 14 нереноеится в блок 15, а б.юк 14 возврани1ется в иеходпое сосостояние и готов к новому вычислению отно1не1 ия /J.
Значение из блока 15 вводится входу 23 в счетчик 10 неремеп1ения накета.
QУстро1 1ство нодготовлено для отработки
переме1непия S .тичина которого онределяется задатчиком 11.
Д.тя отработки персмен1,ения Sja оператор кпопкой 24 взводит трп1тер 5. Ролыанг 4 перемен1ает пакет.
5Блок 14 в этом случае работает аналогично О 1нсанному. Счетчик 10, су.м.мируя импульсы датчика 7. производит отсчет теKyniero перемещения пакета по с|к)рмуле
()
St
-текущее перемещение пагде
тек кета, в котором значением р учтеп будущий торможения накета;
ртек
-текучнее положение неремен1ения накета нри разгоне.
При еоблюдепи ус.ювия
тек зад
срабатьп5ает б.юк 12 сравнения, на его BI Iходе появляется сигнал, счетчик И) сбрасывается на пуль и IOTOB к отсчету нового TeKyHieio перемеи1епня, а по входу 13 три|-гер 5 устанавливается в исходное состояние. Схема 3 управле1Н1я приводо ро.чьганга отключается и пакет 1 тор.моз1ггея.
В том случае, если нри перемещении пакета достигается становиви1аяся скорость.,
что имеет iecTo н)и бо/ииних значениях
Ssaje. срабатьп5ае1 ))e.ie 9 скорости, его выходно сигяа, iiocTNTiacT па вход 21 б,1ока
15 памяти и усг;||1ав.; ив;1ст и iicvvi .iiu-iicinic ft(}. В jTofi еитхиции кмпх.илы датчика
7 В15ОЛЯТСЯ в СЧ(.ТЧИК К) с К()э(|;фиЦ1К1|-Г-()М
исрссчста,. равным I, и емггчик К) oix-4)i:T iваст иереысчцеиие SU пакета с установивщейси CKOjxjiTi.K), так как до ситуации Ei счетчике К) уже иакон-тено чис.ю имиудьсов, ирс)|()р1ии)на,1Ы1ое S Ч:л , переход от движения с уста11овиви1ейся скоростью к торможению накета Г1рои: 011дет н|)и собдюдении с,1()вия
- l:
с
-- S
о 1
13Дтек
Таким образом, нрн отработке переме1нения Зззд б.ток 14 вычис;1яет зиаче1 ие/ , cooTBeTCTfsyioiuee реа.тьным уе.кяншм ра.ч|-()на II торможения накета; б.кж la чано минает VTO значение , а li счетчике К н)и отработке иос.едуклцего неремен1ения учитывается f как при достнжении уста нови вHieficH скорости (6o.Ti iHiie, не Нме1не1П ;.1 ,
|ак и при малых перемещениях пакета. Этим рас1нирякг1ся ф нкниоиа.;11)Ные возмс жности yci |К)йства.
В качестве базового обт,екта н)ння1Ч)
vcTpoiicTfio унравдения неремен1ением пакета подос ме.1косортного проката нри но;)езке на ста1и1оиа)пых ножнннах медко1О|)тных cTiiiiOB завода «Криворожста. 1ь;--. содержан1ее схему управдения приводом родьга П-а с триггером запуска. В это.м устti poiicTBe команды на разгон и торможение накета подаются оператором вручную. При jToM т(;чная установка пакета под рез осуществляется в иеско:1ьк() прие.мов. тгс) ведет к с1П1же11И1о ()й способности участ1 ка cTauiKMiai iibix ножниц.
i 1реимуниством преддагаемсдо стройства в сравнепин с 6;i3OBi)i.i с бт ектом явдястся П(;вын1ение прои.чводите.чьности участка стационарных ножниц за счет точной етановки пакета под рез с первого захода.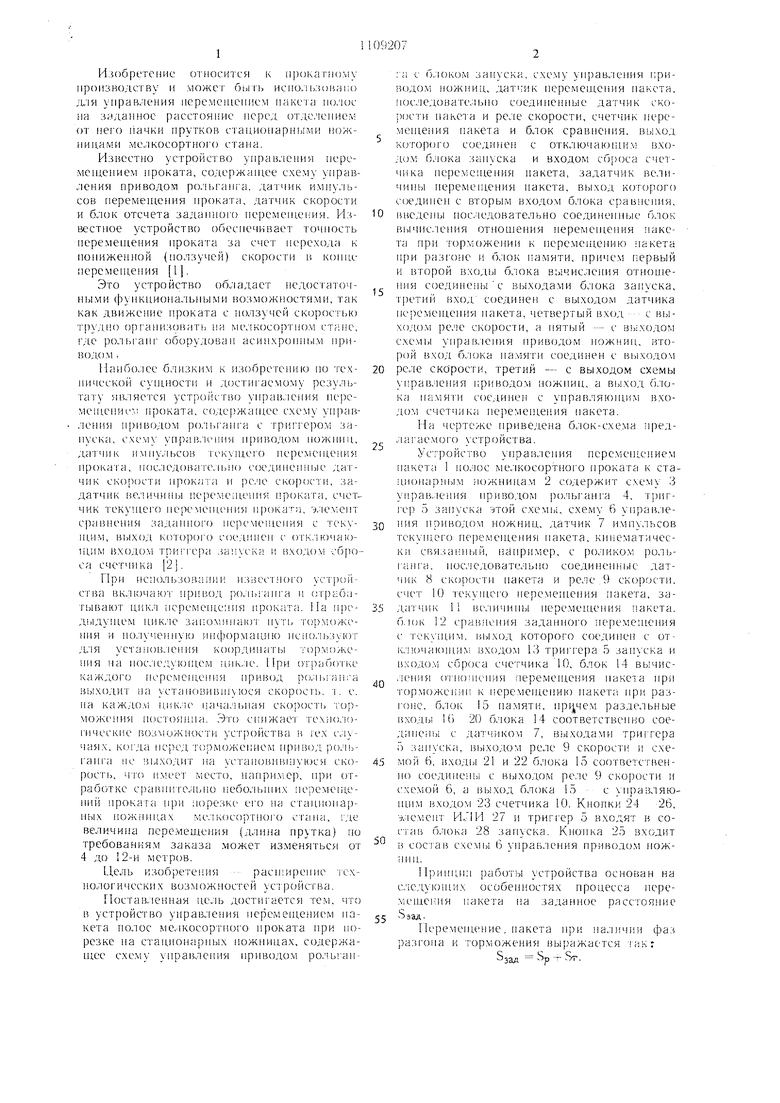
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раскроя пакета полос мелкосортного проката | 1981 |
|
SU969471A1 |
| Система управления раскроем раската на летучих ножницах | 1986 |
|
SU1391813A1 |
| Устройство для управления порезкой стационарными ножницами пакета мелкосортного проката на прутки | 1973 |
|
SU529020A1 |
| Устройство для управления набором пакета полос перед ножницами сортового стана | 1984 |
|
SU1219194A1 |
| Устройство к стану для мерной резки проката | 1981 |
|
SU1152728A1 |
| Система управления приводом многоклетьевого профилегибочного стана с порезкой проката на ходу приводными летучими ножницами | 1982 |
|
SU1049200A1 |
| Устройство управления клапанным сбрасывателем полосы с рольганга мелкосортного стана | 1984 |
|
SU1191134A1 |
| Устройство управления электропроводом летучих ножниц | 1987 |
|
SU1532209A1 |
| Устройство управления приводом многоклетевого профилегибочного стана с порезкой проката на ходу | 1984 |
|
SU1178553A2 |
| В П Т Б | 1973 |
|
SU395139A1 |
УСТРОЙСТВО УПРАВЛГНИЯ ПЕРЕМЕЩЕНИЕМ ПАКЕТА ПОЛОС ,HE;iКОСОРТНОГО ПРОКАТА ПРИ ПОРЕЗКЕ НА СТАЦИОНАРНЫХ , содержанхее с.хему управления нриводом рольганга с блоко.м зануска, с.хе.му управления приводом ножниц, датчик перемещения пакета, последовательно соединенные .чатчик скорости пакета н po.ic скорости, а также счетчпк нсрсмеп1е1 ия пакета н блок сравнения, вы.ход () соединен с отключаюпи м входом б.юка .(ануска и входом Сороса счетчпка неремещення пакета, .адатчик ве.1ичииы перемеп1епия пакета, выход которого соединен с входом б.юка сравнения, от.тчикпцсес.ч тем, что. с ) расп Ml рения техмологпческнх вол м ожн осте ii xCTpoiicTBa, в исто В1 еден1 1 пос.1едовате, соединенные блок вычисления OTHOIHC1П1Я 11еремен1ен1 я пакета нрн горможенин к не|)емеп1ени1о накета при разгоне и б.юк памяти, причем riepBbiii п liTopoii входь б/юка вычисления отнон1ения соединены с выходами б,1ока , IpCTnfi 1)ход соединен с В111Х()дом датчика перемеп1енпя накета, (О четвергьн кхо.; с В1 1ходом pe.ie cKOjX)(Л стп, а пятый с выходом схемы управления приводом но/кпп;и irropoii jixcxi б.юка памяти соединен с выходом pc.ie скорости, третий с Bi)iходом схемы нрав,ення нриводом ножнип, а выход б.юка памяти соедииеп с нравля О11и1м входом счетчика неремешенпя пакета. о со IvC) О 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1980 |
|
SU900907A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для безупорочной резки проката на мерные длины ножницами | 1972 |
|
SU465286A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
