Изобретение относится к манипуляторам для механизации подъемно-транспортных и других операций, а более конкретно к исполнительным органам манипуляторов..
Цель изобретения - расширение зоны обслуживания путем введения третьей степени.подвижности.
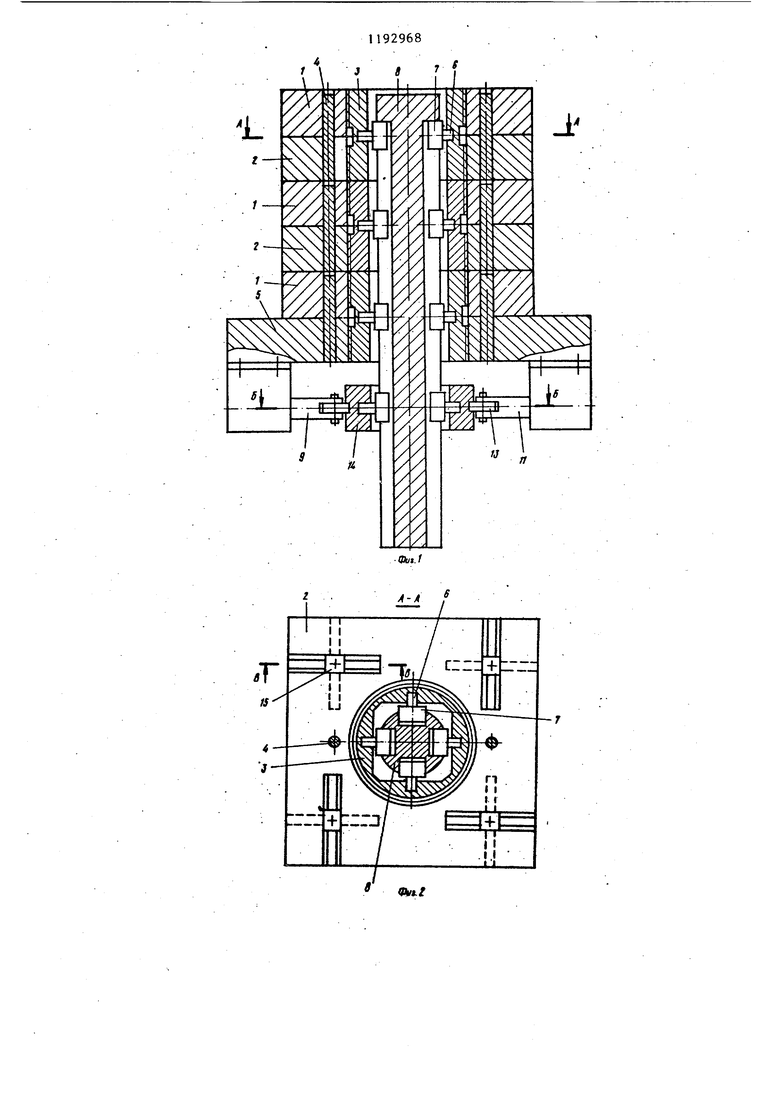
На фиг.1 изображен исполнительньй орган манипулятора, разрез; на фиг,2 разрез А-А на фиг.. 1 ; на фиг.З - сечение Б-Б на фиг.1; на фиг.4 - сечение В-В на фиг.2.
Исполнительный орган манипулятора содержит кинематическую цепь из связанных между собой звеньев и основания. Каждое звено образовано парой пластин 1 и 2, кольцом 3 и парой направляющих 4. На наружной поверхности кольца 3.выполнены участки с правой и левой резьбой, а на вн.утренней поверхности пластин 1 и 2 аналогичные резьбы, свинченные с резьбами колец 3. Направляющие 4 запрессованы в пластины 2 и платфор,му 5 и имеют посадку с зазором на участке взаимодействия с пластинами 1. На внутренней поверхности колец 3 установлены оси 6 с роликами 7, расположенными в продольных прорезях штанги 8. Основание исполнительного органа манипулятора образовано платформой 5, пластиной 1 и кольцом 3, жестко связанных штифтами. К основанию как к неподвижной части конструкции крепится привод, вьтолненный из четырех силовых цилиндров 9 -12, ролики 13 которых размещены в пазах рамки 14, связанной со штангой 8 с помощью осей 6 и роликов 7. . Кинематическая связь звеньев между собой и с основанием обеспечивается штифтами 15, размещенными в пазаХ выполненных в пластинах 1 и 2, а также в платформе 5..
Таким образом, возможно взаимное движение пластин вверх - вниз по их резьбам, а также смещение звеньев одно относительно другого по двум другим прямоугольным координатам.
Исполнительный орган манипулятора работает следующим образом.
Горизонтальное перемещение вправо (влево) получаем, подавая рабочую среду к силовому цилиндру 11 (вправо) или к цилиндру 9 (влево) , одновременно обеспечивая .выпуск из цшшндра 9
(или 11). в обеих случаях силовые цилиндры 12 и 10 блокируются, т.е. перемещение их штоков от штанги В неBO3MokHo. Возникающий в связи с эксцентричным приложением сил крутящий момент не приводит к повороту штанги так как уравновешивается усилием от ролика блокированного цилиндра. Например, при работе цилиндра 9 (ход влево) возникает крутящий момент, стремящийся повернуть штангу 8 по часовой стрелке (фиг.З). Однако этому препятствует усилие, приложенное от заблокированного штока цилиндра 10 и создающее равный контрмомент, направленный в противоположную сторону (против часовой стрелки).Таким образом, результирующее движение прямолинейное.
Перемещение вперед (или назад) по лучаем, подав рабочую среду к силовому цилиндру 10 (или 12)., обеспечив вьтуск рабочей среды из цилиндров 12 (или 10) и заблокировав цилиндры 9 и 11 ( фиг.З).
Б рассмотренных случаях смещение выходного (верхнего) звена происходит ввиду наклона штанги 8 и ьзаимодействия ее прорезей с роликами 7, и вызываемому этим взаимному смещению смежных звеньев, в горизонтальной плоскости (фиг.1).
Перемещение кинематической цепи вверх получаем, подав рабочую среду к цилиндрам 9 и 11 и обеспечив выпуск рабочей среды из цилиндров 10 и 12. При этом ввиду смещения осей этих силовых цилиндров относительно оси ш.танги в противоположные стороны и равенства сил иа их штоках возникает крутящий момент, поворачивающий штангу 8 по часовой стрелке. Вращение передается роликом 7 звеньев, кольцом 3 и резьбам (правой и левой), выполненным на их наружных поверхностях. С этими резьбами связаны аналогичные резьбы на внутренних поверхностях пластин 1 и 2 и на платформе 5. Направляющие 4 препятстсвуют взаимному их повороту, поэтому происходит отход пластин 1 от пластин 2 (или от платформы 5) . Общее вертикальное перемещение всей конструкции равно сзгмме смещений всех звеньев.
JL
J.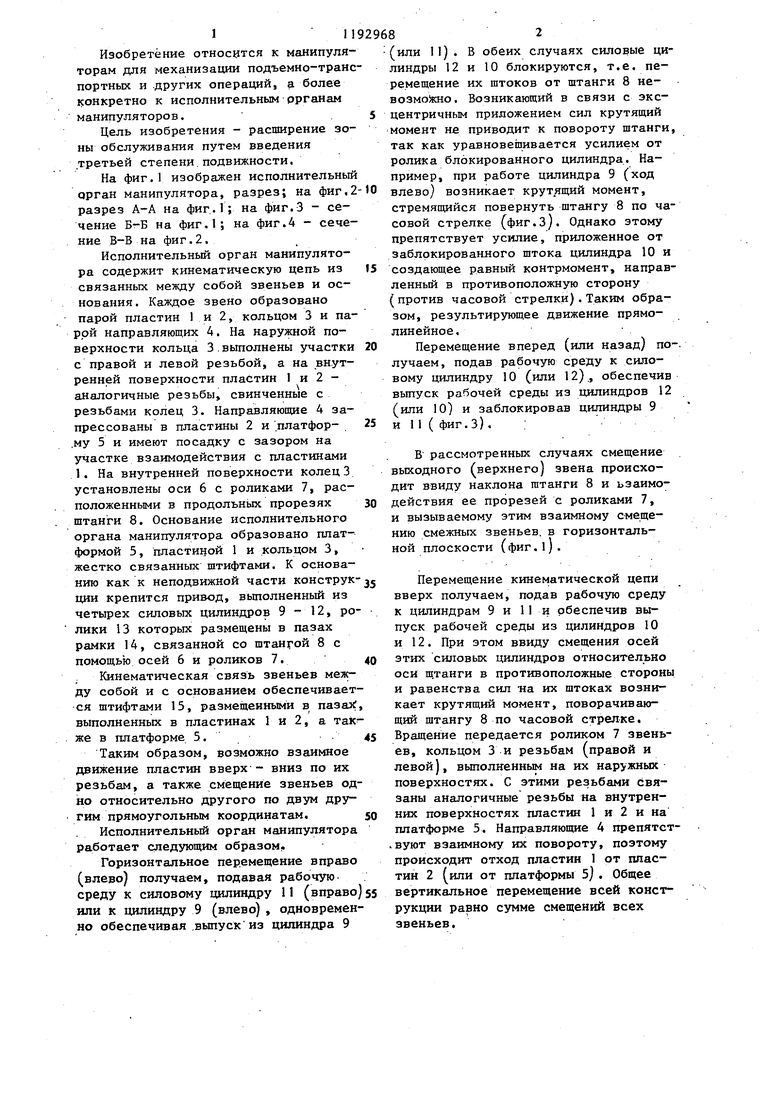
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU942981A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| ПОСЕВНОЙ КОМБИНИРОВАННЫЙ АГРЕГАТ | 1997 |
|
RU2126199C1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| ФРИКЦИОННЫЙ ТОРОВЫЙ КОЛЬЦЕВОЙ ВАРИАТОР | 2006 |
|
RU2315214C2 |
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| СПОСОБ УЛУЧШЕНИЯ ВОДНО-ВОЗДУШНОГО РЕЖИМА ПОЧВЫ ПОД ПОСЕВАМИ МНОГОЛЕТНИХ КОРМОВЫХ КУЛЬТУР, УСТРОЙСТВО ДЛЯ НАРЕЗКИ ЩЕЛЕЙ-КРОТОВИН И УКЛАДКИ ДРЕНАЖНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ОСУШЕНИЯ И ПОДПОЧВЕННОГО УВЛАЖНЕНИЯ | 1997 |
|
RU2116723C1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий кинематическую цепь из связанньк между собой звеньев входное звено которой соединено с основанием и приводом, вьтолненным в виде четьфех аналогичных силовых цилиндров, а выходное - с рабочим органом, причем звенья и основание имеют отверстия, в которых расположена штанга, а каладая пара смежных звеньев имеет по четыре взаимно перпендикулярных прорези с размещенными в них штифтами, отлич ающ и и с я тем, что, с целью расширения зоны обслуживания, он снабжен направляющими и кольцами, на наружной поверхности которых выполнены два участка с левой и правой резьбами, а на внутренней диаметрально установлены четыре ролика, при этом звенья выполнены в виде пары аналогичных пластин, установленных на направляющих, а на внутренней поверхности этих пластин выполнены соответственно левая и правая резьбы, 9 образующие с резьбами колец резьбо(Л вые пары, причем на штанге выполнены прорези под ролики каждого кольца, а оси противолежащихсиловых цилиндров привода смещены относительно оси штанги в противоположные стороны. ;о ю о 00
13
...:.
i- /
12
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
