(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU942981A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1192968A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Манипулятор | 1985 |
|
SU1284820A1 |
| Исполнительный орган манипулятора | 1981 |
|
SU971641A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| Исполнительный орган манипулятора | 1984 |
|
SU1172696A1 |
1
Изобретение относится к машиностроению, а более конкретно - к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные и другие операции.
Известен исполнительный орган манипулятора, содержащий кинематическую цепь из сочлененных между собой звеньев, входное звено которого связано с приводом и основанием, а выходное с захватом 1.
Недостатком известного исполнительного органа манипулятора.является недостаточная жесткость, так как звенья связаны валами круглого поперечного сечения, изгибные жесткости которых невелики.
Цель изобретения - повьааение жесткости.
Эта цель достигается тем, что исполнительный орган снабжен штангой, а кинематическая цегГь выполнена из чередующихся рабочих и переходных звеньев, снабженных направляющими на торцах, причем направляющие на верхних и нижних торцах переходных звеньев взаимно перпендикулярны, при этом рабочие звенья и основание шарнирно связаны со штангой.
Переходные звенья выполнены в виде рамок.
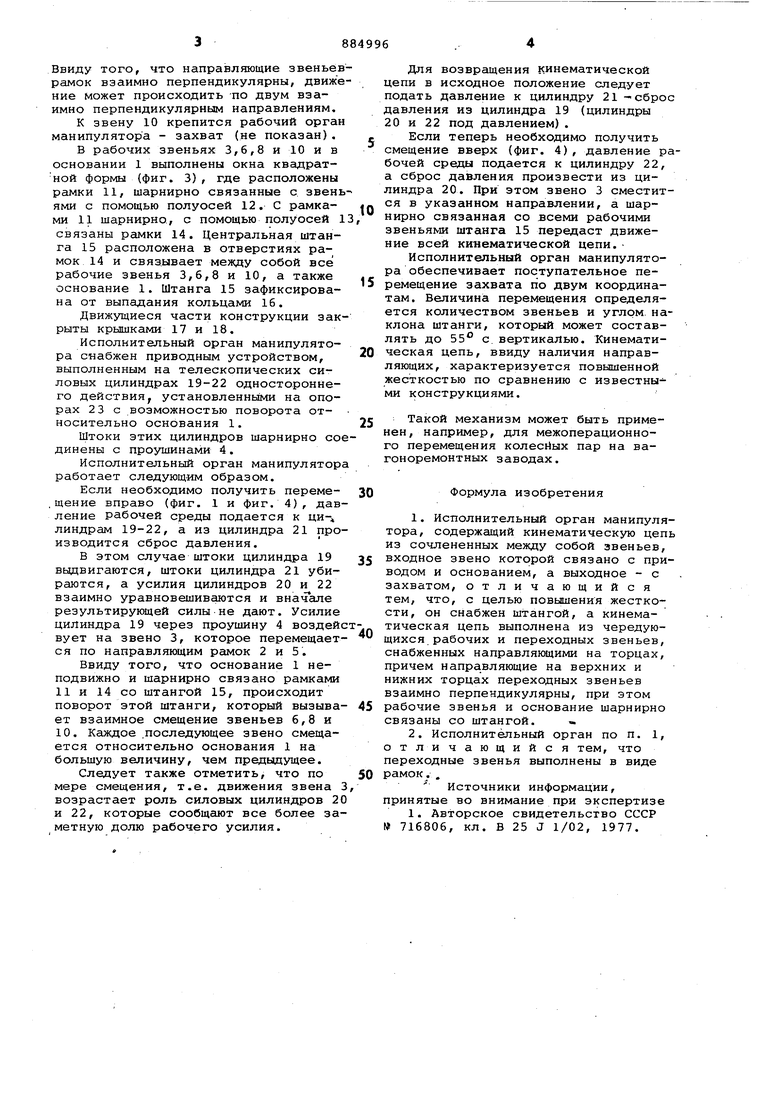
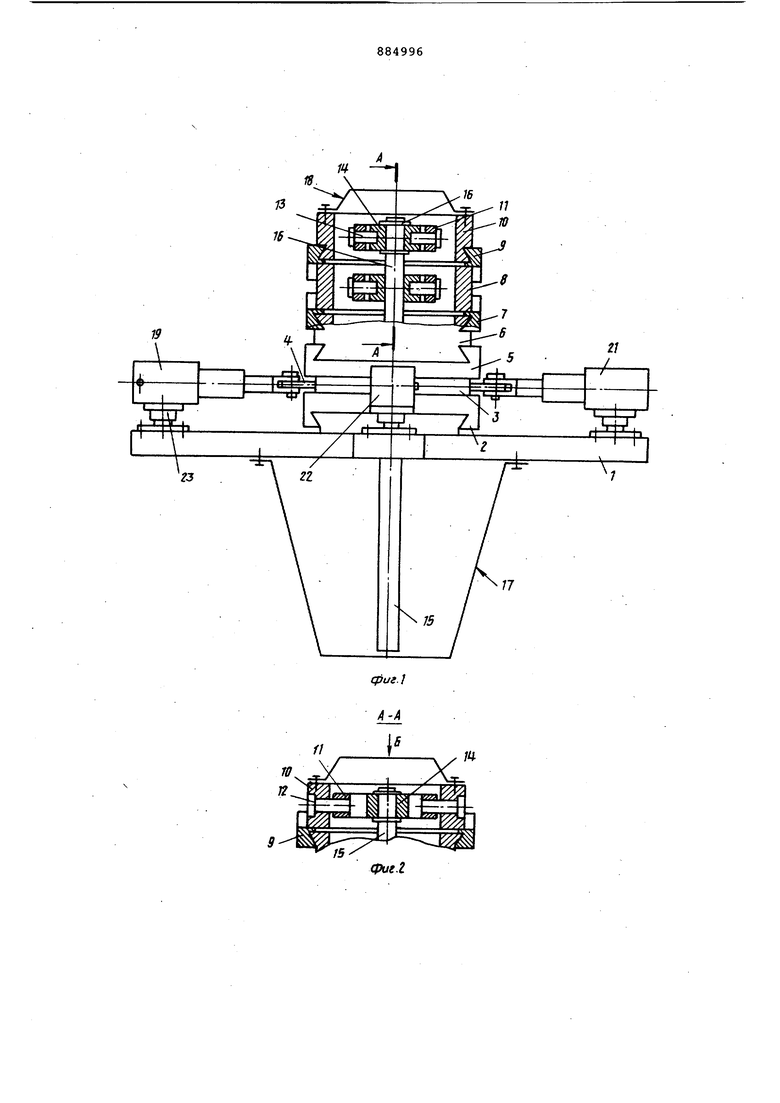
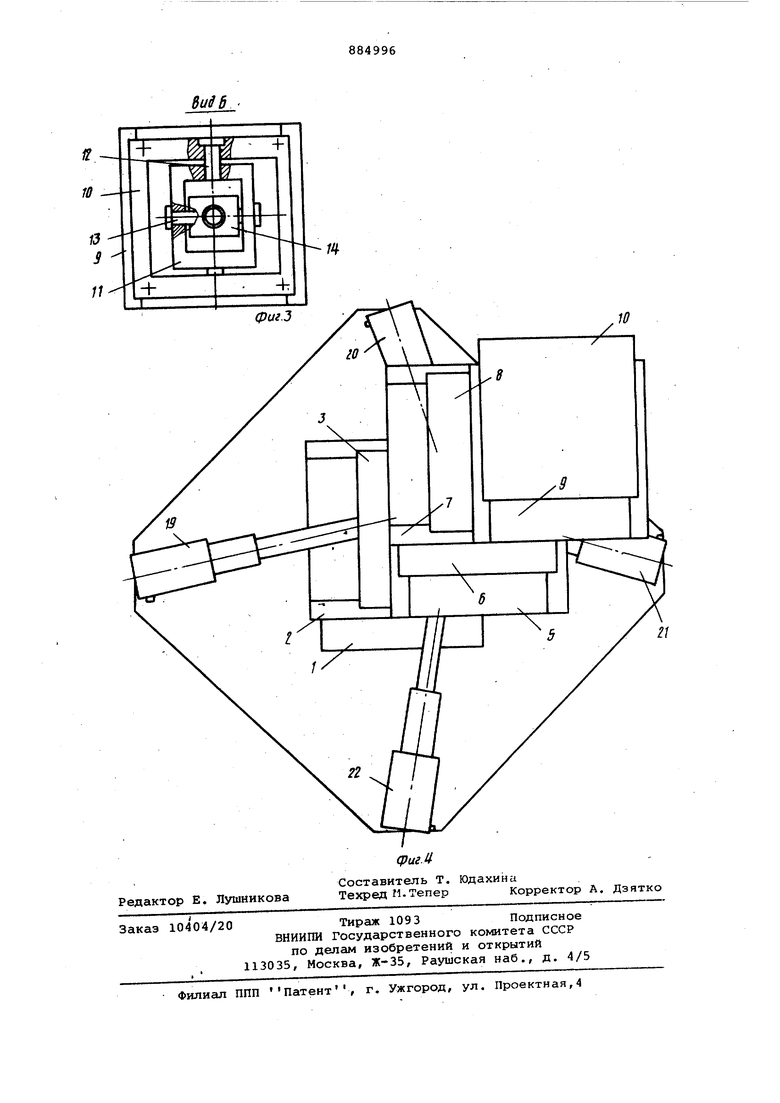
На фиг. 1 представлен исполнительный орган манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2 (крышка не показана); на фиг. 4 - исполнительный орган, вид сверху, отклоненное положение.
10
Исполнительный орган манипулятора содержит основание 1, снабженное прямолинейными направляющими типа ласточкин хвост , на которых установлено переходное звено-рамка 2.
15 Эта рамка имеет аналогичные направляющие, выполненные на верхнем и нижнем ее торцах, причем направляющие верхнего и нижнего торцов взаимно перпендикулярны. С рамкой 2 взаимодействует звено 3, которое имеет аналогичные направляющие на своих торцах и, кроме того, четыре.проушины 4, необходимые для передачи усилия от привода при работе. С звеном
25 3 взаимодействуют последовательно расположенные рамка 5, звено 6, рамка, 7, звено 8, рамка 9 и звено 10, образующие кинематическую цепь с возможностью взаимногр смещения звеньев по прямолинейным направляющим.
виду того, что направляющие звеньевамок взаимно перпендикулярны, движеие может происходить -по двум взамно перпендикулярным направлениям.
К звену 10 крепится рабочий орган анипулятора - захват (не показан). В рабочих звеньях 3,6,8 и 10 ив сновании 1 выполнены окна квадратой формы (фиг. 3), где расположены амки 11, шарнирно связанные с звеньми с помощью полуосей 12, С рамка- |Q и 11 шарнирно, с помощью полуосей 13, связаны рамки 14. Центральная штанга 15 расположена в отверстиях рамок 14 и связ.ывает между собой все рабочие звенья 3,6,8 и 10, а также «г основание 1. Штанга 15 зафиксирована от выпадания кольцами 16.
Движущиеся части конструкции закрыты крышками 17 и 18.
Исполнительный орган манипулятора снабжен приводным устройством, выполненным на телескопических силовых цилиндрах 19-22 одностороннего действия, установленньЁми на опорах 23с возможностью поворота относительно основания 1.25
Штоки этих цилиндров шарнирно соединены с проушинами 4.
Исполнительный орган манипулятора работает следующим образом.
Если необходимо получить переме- 30 щение вправо (фиг. 1 и фиг. 4), давление рабочей среды подается к ци- линдрам 19-22, а из цилиндра 21 производится сброс давления.
В этом случае штоки цилиндра 19 35 вьадвигаются, штоки цилиндра 21 убираются, а усилия цилиндров 20 и 22 взаимно уравновешиваются и результирующей силы не дают. Усилие цилиндра 19 через проушину 4 воздейст1V X .
п 40 вует на звено 3, которое перемещает ся по направляющим рамок 2 и 5.
Ввиду того, что основание 1 неподвижно и шарнирно связано рамками 11 и 14 со штангой 15, происходит поворот этой штанги, который вызыва- 45 ет взаимное смещение звеньев 6,8 и 10. Каждое .последующее звено смещается относительно основания 1 на большую величину, чем предьщущее.
Следует также отметить, что по 50 мере смещения, т.е. движения звена 3, возрастает роль силовых цилиндров 20 и 22, которые сообщают все более заметную долю рабочего усилия.
Для возвращения кинематической цепи в исходное положение следует подать давление к цилиндру 21 -сбро давления из цилиндра 19 (цилиндры 20 и 22 под давлением).
Если теперь необходимо получить смещение вверх (фиг. 4), давление рбочей среды подается к цилиндру 22, а сброс давления произвести из цилиндра 20. При этом звено 3 сместится в указанном направлении, а шарнирно связанная со всеми рабочими звeнья ш штанга 15 передаст движение всей кинематической цепи.
Исполнительный орган манипулятора обеспечивает поступательное перемещение захвата по двум координатам. Величина перемещения определяется количеством звеньев и углом, наклона штанги, который может составлять до с. вертикалью. Кинематическая цепь, ввиду наличия направляющих, характеризуется повышенной жесткостью по сравнению с известными конструкциями.
- Такой механизм может быть применен, например, для межоперационного перемещения колесйых пар на вагоноремонтных заводах.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
