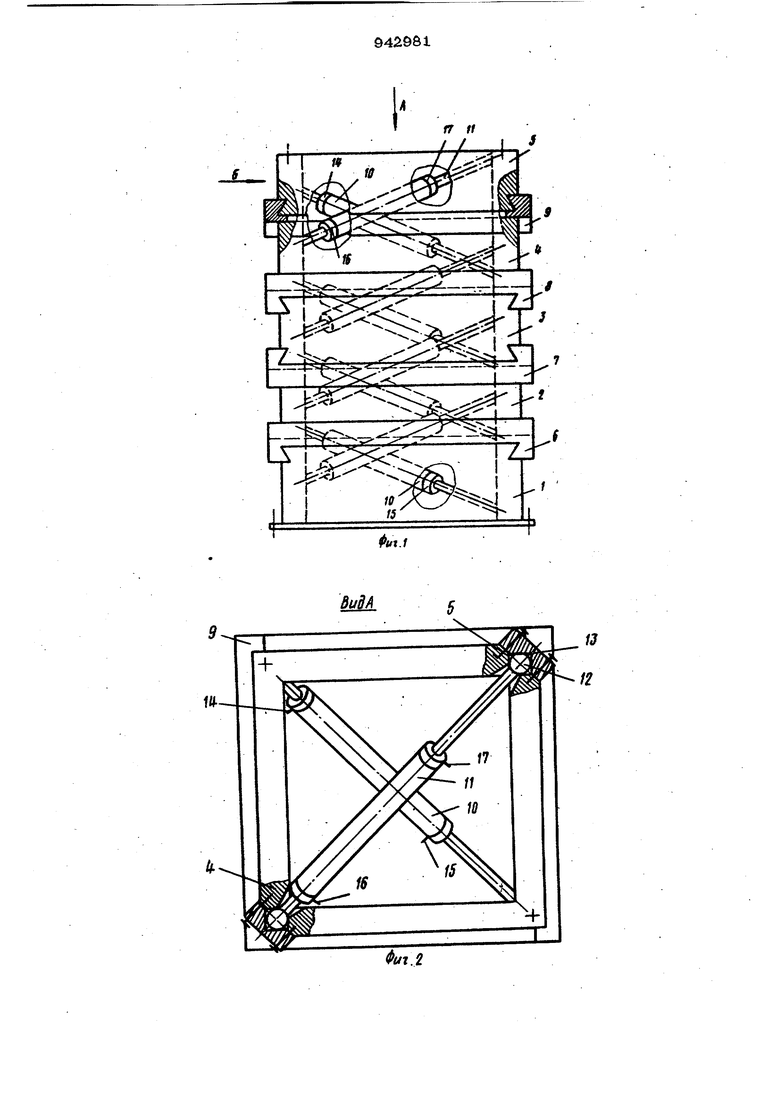
Изобретение относится к Машиностроеншо, а именно к манипуляторам для автоматизации технологических щэоцессов Известен исполнительный орган манипулятора, содержащий кинематическую цепь из соединенных между собой звенье выполненных в виде рамок, причем цепь набрана из чередующихся рабочих и переходных звеньев, а также силовые цилиндры и штангу, Ш1фнирно связанную со всеми звеньями Cl. Недостатком известного органа является снижение грузоподъемности как при увеличении числа звеньев, так и ирн увеличении наклона штанги. Цель изобретения - повышение грузоподъемности. Цель достигается тем, что каждая пара рабочих смежных звеньев шарнирно связана между собой двумя силовыми шшинщ)ами, расположенными по диагонали рамок, причем одноименные полости силовых цилиндров смежных пар звень ев, имеющих параллельные оси, соединены дополнительно введенными трубЬхфоводами. На фиг. 1 изображен исполнительный орган манипулятора, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 вид Б на фиг. 1. Исполнительный орган манипулятора содержит основание 1 и сочлененные с ним рабочие звенья 2-5, снабженные направляющими на торцах (в данном случае выбраны направляющие типа ласточ.кин хвост ) Между основанием 1 и рабочими звеньями 2-5 размещены переходные звенья 6-9, вьшолненные как и рабочие звенья в виде рамок в снабженные аналогичными направляющими, причем нагфавляющие на верхнем и нижнем торцах переходных звеньев 6 9 взаимно перпендикулярньи Каждые два смежных рабочих звена 5 и 4, 4 и 3 и 2, а также рабочее рвено 2 и основание 1 связаны друг с другом одинаковыми силовыми цилиндрами 1О и 11. На фиг. I видно, что группа цилиндров 10 (четьфе цилиндра) наклонена вниз, а группа ципиндрой li (четьфе цнлшшра) наклонена вверх. Силовые цилиндры 10и 11 расположены по диагоналям рабочих звеньев-рамок и соединены с ннми с помощью сферическюс 12 и закрыты крышками 13. Группы цилиндров id име(от штуцеры 14 и 15, связаю ные соответственно с поршневыми и што ковыми полостями, а хтруппа цилиндров 11имеет штуцеры 16 и 17, связанные также с поршневыми и штоковыми полостями этой группы. Четьфе штуцера 14, четьфе штуцера 15, четыре штуцера 16 и четьфе штуцера 17 соответственно соединены между собой трубопроводами (не показаны).; Исполнительный орган манипулятора работает следующим образом. При необходимости движения вхфаво давление рабочей среды подается к группам штуцеров 14 и 16 силойых цилиндров 1б и 11. При этом силовые цилиндры работают на вьщвижение штоков. Для получения движения влево давление рабочей среды подается к группам 15 и 17. При этом группы силовых цилиндров работают на уборку штоков. Движение вверх.; достигается при по даче давления к штуцерам 15 и 16 груп силовых цилиндров 10 и 11 и при расходах рабочей среды, обеспечивающих равные скорости выдвижения штоков ав линдров 1 и уборки штоков цилишфов 10 Движение вниз получаем при подаче давления к штуцерам 14 и 17 и 1фи рас 6 614 ходах, обеспечивающих равные выдвижения штоков цилиндров 10 и штоков цилиндров 11. Во всех четырех рассмот1шнных случаях рабочие звенья взаимно смещаются по на1фавляющим, при этом ввиду ра- Ёенства рабочих объемов и длин силовых цилиндров обеспечивается смещение всех рабочих звеньев, на одну и ту же величину относительно смежных звеньев. . рические шарниры 12 обеспечивают возможность углового смещения силовых цилиндров 1О и 11 относительно звеньев 2 - 5 и основания 1 1фи движении. Формула изобретения Исполнительный орган манипулятора, содержащий силовые цилиндры и кинематическую цепь из чередующихся рабочих и переходных звеньев, вьшолненных в авде рамок, снабженных направляющими, отличающийся тем, что, с целью повьш1ения грузоподъемности, каждая рабочих и смежньцс звеньев шаршфно связана между собой двумя силовыми цилиндрами, расположенными по диагоналям рамок, причем одноименные полости силовых цилиндров смежных звеньев, имеющих параллельные оси, гидравлически соединень между собой. Источники инфсфмации, 1финятые во вниманий юри экспертизе 1. Авторское свидетельство СССР по заявке № 2896197/25-О8, кл. В 25 J 1/02, 21.03.80.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Исполнительный орган манипулятора | 1981 |
|
SU971641A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1036525A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Манипулятор | 1985 |
|
SU1284820A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1172696A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1192968A1 |
fe
wi.J
