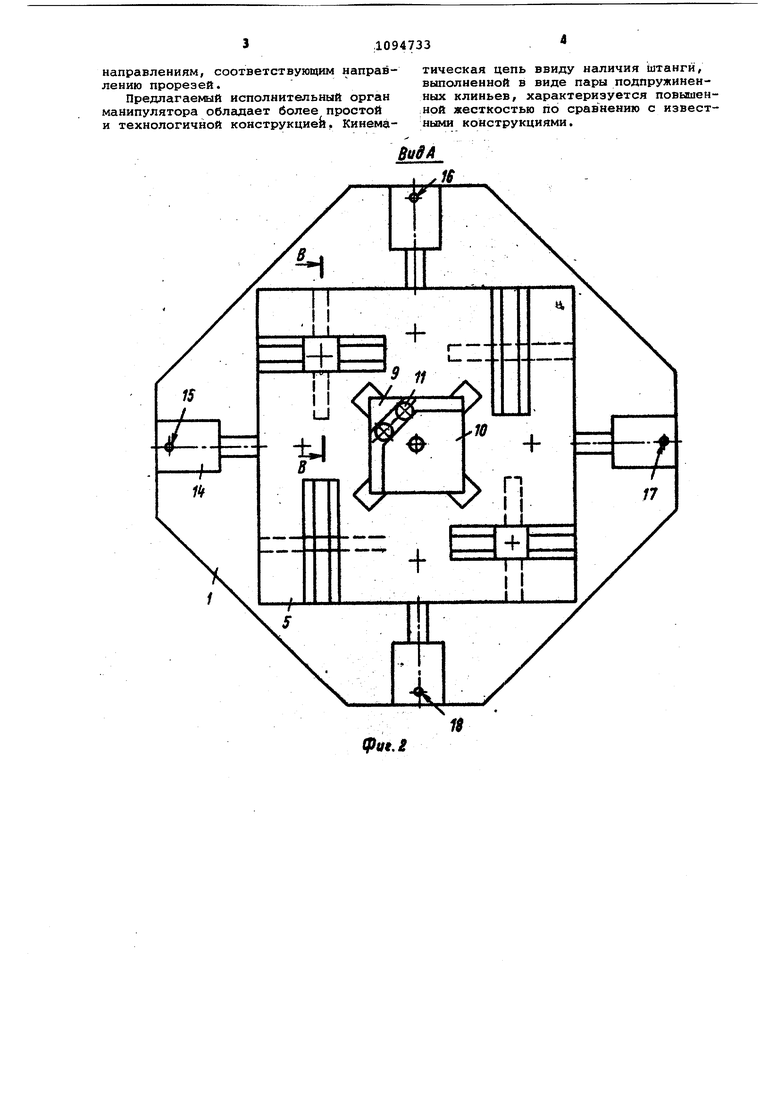
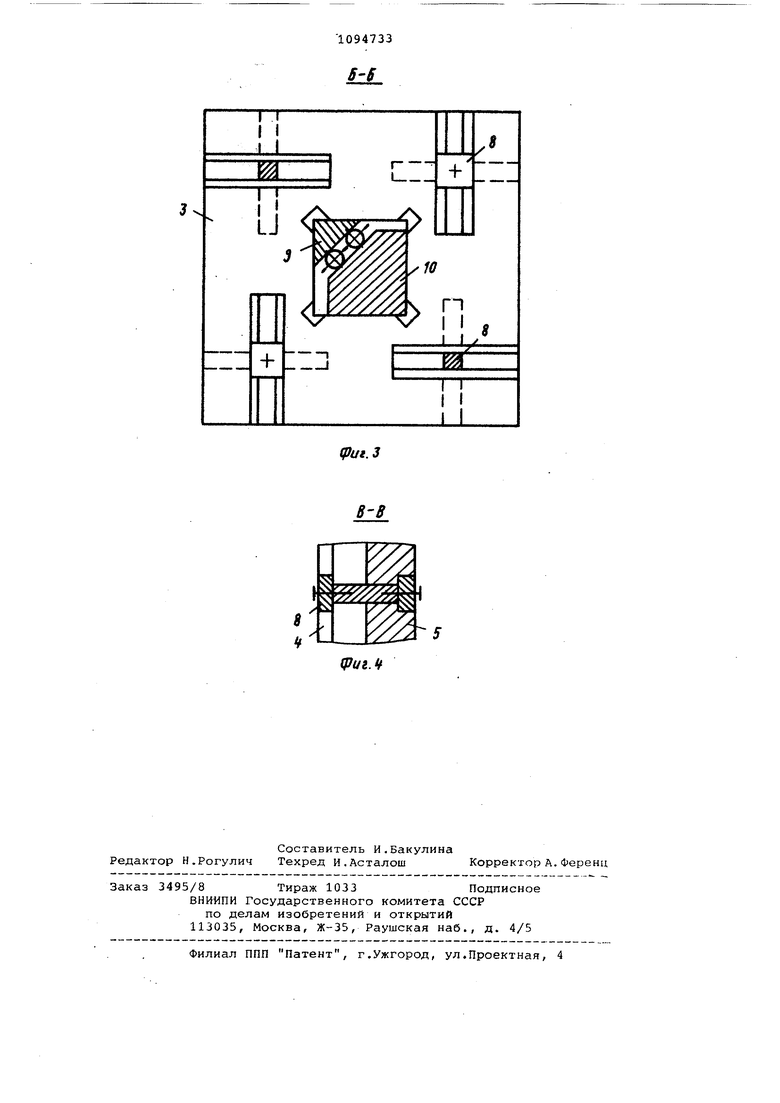
Изобретение относится к манипуляторам для механизации транспортных операций, конкретнее к исполнительным органам манипуляторов. Избестен манипулятор, содержащий кинематическую цепь из шарнирно сочлененных звеньев, первое из которых связано с основанием и приводом, а последнее - с захватом. Этот манипулятор обеспечивает две поступательные степени подвижности Cl3. (Недостатком такого манипулятора является сложность конструкции и невысокая грузоподъемность. Наиболее близким к предлагаемому изобретению является исполнительный орган манипулятора, Су1ержащий кинематическую цепь из сочлененных между собой звеньев, входное звено кото рой связано с основанием и приводом а выходное - с захватом, и штангу, кинематически связанную со звеньями и основанием 23. Известный исполнительный орган манипулятора обладает более высокой грузоподъемностью и жесткостью, одна ко ввиду наличия многочисленных шар ирных соединений, требующих высокой точности изготовления, конструкция и технология изготовления сравнитель но сложны. Цель изобретения - повьвиение грузоподъемности и жесткости. Эта цель достигается тем, что в исполнительном органе манипулятора, содержащем кинематическую цепь из со члененных между собой звеньев, входное звено которой связано с основанием и приводом, а выходное - с захватом, и штангу, кинематически связанную со звеньями и основанием, штанга выполнена в виде пары подпружиненных клиньев с углом клина, боль шим угла трения, причем клинья установлены скошенными поверхностями в противоположные стороны, а звенья и основания выполнены в виде пластин с отверстием, в котором расположена штанга, при этом в каждом из звеньев и в основании выполнено по четыре прорези, перпендикулярные одна друго и прорезям смежного звена, а в прорезях каждой пары звеньев по диагонали установлены дополнительно введенные штифты. На фиг.1 показан исполнительный орган манипулятора, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг.З сечение Б-Б на фиг. 1; на фиг. 4 сечение В-В на фиг. 2. Исполнительный орган манипулятор содержит основание 1 и кинематическую цепь из аналогичных звеньев 2-5 К основанию 1 крепится крьшГка 6, а к выходному звену 5 - крышка 7 и за хват (или другой рабочий орган), (н показан ). Каждое звено 2 - 5 и основание 1 выполнено в виде пластины квадратной формы в плане с квадратным отверстием в центре, края которого скруглены. В звеньях и основании выполнено по четыре прорези, направление каждой прорези перпендикулярно смежной к прорезям смежного звена; в прорезях каждой пары смежных звеньев по диагонали звена установлены штифты 8, изготовленные, с целью облегчения монтажа разъемными, из трех частей. Штанга выполнена из двух аналогичных клиньев 9 и 10 с углом клина, большим угла трения. Поперечное сечение частей штанги у ее концов имеет форму равнобедренного прямоугольного треугольника. Между клиньями 9 и 10 штанги размещены шарики 11, снижающие трение при взаимном смещении клиньев. Обе части штанги взаимно подпружинены пружинами 12 с направляющими 13. Приводное устройство содержит четыре гидроцилиндра 14, шарнирно установленные на основании 1. Рабочая среда к ним подается через штуцеры 15 - 18. Штоки 19 этих силовых цилиндров взаимодействуют с первым звеном 2. Исполнительный орган манипулятора работает следующим образом. В исходном положении давление ра|бочей среды подано ко всем силовым цилиндрам, и система находится в равновесии . При необходимости получить перемещение вправо производится сброс давления из штуцера 17, при этбм усилие левого силового цилиндра 14 прбвышает усилие правого, и шток 19 перемещает звено 2 вправо. Основание 1неподвижно, поэтому вся система звеньев смещается вправо, при этом каждое звено последующее сдвигается относительно предыдущего на равные расстояния При этом части штанги (клинья 9 и 10)совершают одновременно взаимное продольное и поперечное перемещения, что приводит к удлинению штанги в целом и к уменьшению .ее поперечного сечения, а направляющие 13 перемещаются по внутренним поверхностям крышек 6 и 7. Пружины 12 способствуют прижиму клиньев 9 и 10 к рабочим поверхностям звеньев 2- 5 и основания 1. Для перемещения влево производится сброс давления из штуцера 15. Перемещение вверх получим, сбросив давление из штуцера 1Ь, а перемещение вниз - при сбросе давления из штуцера 18. Наличие взаимно перпендикулярных прорезей в смежных звеньях и в основании, связанных один с другим штифтами 8, обеспечивает перемещег ние всей кинематической цепи по двум
направлениям, соответствующим направлению прорезей.
Предлагаемый исполнительный орган манипулятора обладает более простой и технологичной конструкцией, Кинематическая цепь ввиду наличия штанги, выполненной в виде пары подпружиненных клиньев, характеризуется повышенной жесткостью по сравнению с известными конструкциями.
18
Фи9.2
I I t I
ж
S-6
+
Ж.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1980 |
|
SU942981A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1036525A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Исполнительный орган манипулятора | 1981 |
|
SU971641A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1192968A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1050861A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
ИСПОЛНИТЕЛЬНЫЙ.ОРГАН МАНИПУЛЯТОРА, содержащий кинематическую цепь из сочлененных между собой звеньев, входное звено которой связано с основанием и приводом, а выходное - с захватом, и штангу, кинематически связанную со звеньями и основанием, отличающийся тем, что, с целью повышения грузоподъемности и жесткости, штанга выполнена в виде пары подпружиненных клиньев с углом клина, большим угла трения, причем клинья установлены скошенными поверхностями в противоположные стороны, а звенья и основание выполнены в виде пластин с отверстием, в котором расположена штанга, при этом в каждом из звеньев и в основании выполнено по четыре прорези, перпендикулярные одна другой и прорезям смежного звена, а в прорезях каждой § пары звеньев по диагонали установлеСП ны дополнительно введенные штифты. «f
(риг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1977 |
|
SU716806A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
