d
i
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU942981A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Манипулятор | 1985 |
|
SU1284820A1 |
| Исполнительный орган манипулятора | 1981 |
|
SU971641A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1172696A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий аналогичные ;зэенья, соединеншле между собой силовьоми цилиндрами, расположвииь04и внутри звеньев, отличающийся тем, что, с целью повышения надежности и грузоподъемности,. каждое звено выполнено в виде рамки, на внутренней поверхности которой имеются направляющие, а силовые цилиндры в каждой рамке расположёны попарно во взаимно перпендику ярных направлениях, причем штоки силовых цилиндров в паре предыдущего звена жестко закреплены на дополнительно введенных 6auBvsaKax, расположенных в направляющих рамки последующего звена.
Й Аг.
чЗ
4ia Ф IsD
Изобретение относится к машиностроению, а более конкретно, к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные и другие операции.
Известен исполнительный орган манипулятора , содержащий аналогичные звенья, соединенные между собой силовыми цилиндрами, расположенными внутри звеньев f1.
Однако данный исполнительный орган манипулятора1 характеризуется недостаточной надежностью и грузоподъемностью, так как звенья выполнены сферического сечения, изгибные жесткости которых невелики.
Цель изобретения - повышение надежности и грузоподъемности.
Поставленная цель достигается тем, что в исполнительном органе манипулятора -, содержащем аналогичные звенья, соединенные между собой силовыми цилиндрами, расположенными внутри звеньев, каждое звено выполнено в виде рамки, на внутренней поверхности которой имеются направляющи е а силовые цилиндры в каждой рамке расположены попарно во взаимно перпендикулярных направлениях,причем штоки силовых цилиндров в паре предыдущего звена жестко закреплены на дополнительно введенных башмаках, расположенных в направляющих рамки последующего звена.
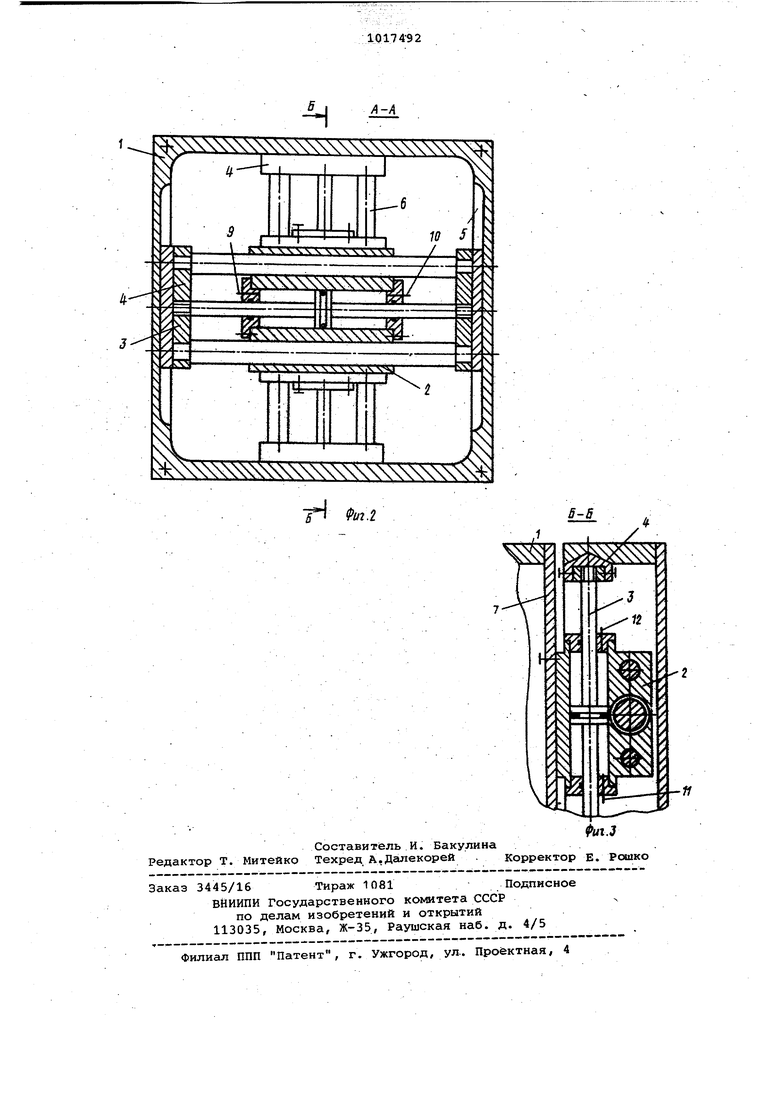
На фиг. 1 показан исполнительный орган манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. Ij на фиг..3 - сечение Б-Б на фиг. 2.
Исполнительный орган манипулятора содержит кинематическую цепь из звеньев 1, выполненных в виде рамок.Внутри звеньев 1 расположены силовые цилиндры, например с двусторонними 111Токами, корпусы 2 которых расположены во взаимно перпендикулярных направлениях и в данной конструкции выполнены заодно. Штоки 3 силовых цилиндров в паре предыдущего звена 1 жестко закреплены на противоположных башмаках 4, расположенных в направляющих 5, выполненных на внутренней поверхности каждого последующего звена 1. С целью повышения жесткости, силовые цилиндры снабжены направляющими 6, также связанными с противоположными башмаками 4. На 5 каждом звене 1 закреплена крышка 7, на которой, в свйю очередь, установлены корпусы 2 пары силовых цилиндров смежного звена. Первая пара силовых цилиндров закреплена на основании 8. Рабочая жидкость поступает в силовые цилиндры через группы штуцеров 9 и 10, 11 и 12. Трубопроводы, соединяющие одноименные полости направляющих в одну сторону силовых 5 цилиндров, на фигурах не показаны.
К последнему звену крепится рабочий орган манипулятора - захват (.Не показа.н ).
Исполнительный орган манипулятора работает следующим образом. При необходимости получить движение вправо (фиг. 2) давление жидкости должно быть подано к штуцерам 9, сброс производится из штуцеров 10.. Движение влево (фиг. 2) получаем, 5 подав давление к группе штуцеров 10, сброс производится из штуцеров 9.
Движение ;вверх (фиг. 2) происходит при подаче давления к штуцерам 11, сброс давления производится из штуцеров 12. Движение вниз (фиг. 2) получаем при подаче давления к штуцерам 12, сброс давления производит.ся из штуцеров 11.
Во всех перечисленных случаях 5 звенья рамки 1 взаимно смещаются на величину, равную ходу штока 3 силового цилиндра, а с 1марное смещение будет равно сумме расстояний, пройденных всеми штоками 3. При этом п гидравлическая связь между цилиндрами обеспечивает необходимую жесткость кинематической цепи.
Использование предлагаемого изобретения повышает .надежность и грузоподъемность исполнительного органа за счет увеличения площади контакта при смещении звеньев относительно друг друга, что повышает жесткость всей конструкции.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ХОБОТ МАНИПУЛЯТОРА | 0 |
|
SU285668A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
