проводного материала, за счет автоматической самоустановки захватной детали. При сведении губок 1 приводом 4 происходит взаимодействие детали 16 с упругими элементами 5, вьтолнеп- ными из злектропроводного материала и замыкание через деталь 16 цепи питания реле 6, которое своими контактами и -контактами реле 7 замыкает цепь питания электромагнитного вибратора 3. Вибрация губки 1 приводит к смещению детали в призматические
1
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, предназначенных для Проведения подъемно-транспортных работ, с цилиндрическими деталями.
Целью изобретения является обеспечение надежности работы схвата при захвате деталей из. токопроводного ма- териала за счет автоматической самоустановки захваченной детали.
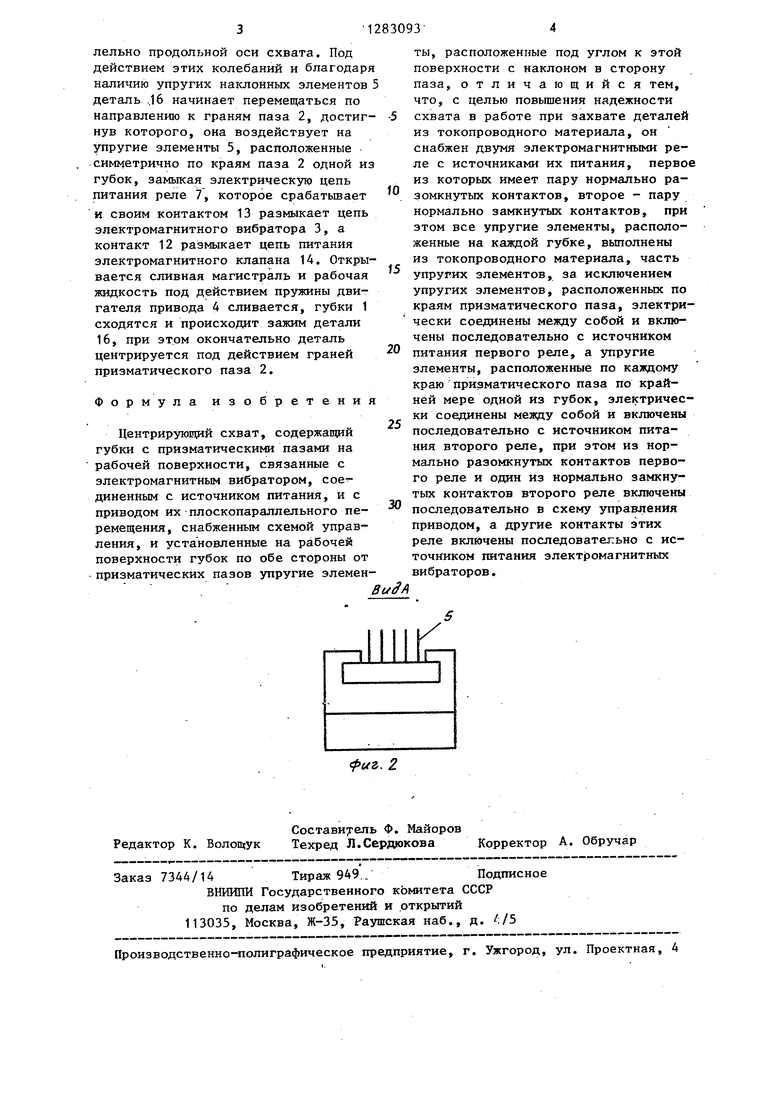
На фиг. 1 изображен схват, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1.
Центрирующий схват содержит губки 15 1 с призматическими пазами 2 на рабочей поверхности, связанные с электромагнитным вибратором 3jсоединенными с источником питания (не показан), и приводом 4 плоскопараллельного пере- 20 мещения, снабженным схемой управления. На рабочей поверхности губки .1 по обе стороны от призматических па-; зов 2 установлены упругие элементы 5,
25
например, иглы, выполненные из токопроводного материала и расположенные под углом к этой поверхности с наклоном в сторону паза 2.
Кроме того, схват содержит два электромагнитных реле 6 и 7 с источ- киками их питания 8 и 9 соответственно, первое реле 6 имеет пару нормально разом1«нутых контактов 10 и 11, а второе реле 7 - пару нормально замкнутых контактов 12 и 13, нап- ример магнитоуправляемых. Упругие элементы 5, расположенные на каждой губке 1, за исключением расположенных по краям призматического паза.
пазы 2, вьтолненные на рабочих поверхностях губок, при этом происходит замыкание через деталь 14 упругих элементов 5, расположенных симметрично по краям паза 2 одной из губок, что приводит к включению реле 7, которое своими контактами 12 разрывает цепь питания электромагнитного вибратора 3, а контактом 13 - цепь питания электромагнитного клапана 14. При этом происходит дальнейшее сведение губок и захват детали 16. 2 ил.
5 0
5
О 5
электрически соединены между собой и включены последовательно с источ- ,НИКОМ питания 8 реле 6, а упругие элементы 5, расположенные по каждому краю паза 2 по крайней мере одной из губок, электрически соединены между собой и включены последовательно с источником питания 9 реле 7. При этом контакты 10 и 13 включены последовательно в схему управления приводом 4, содержащую электромагнитный клапан 14 и источник 15 питания, а контакты 11 и 12 включены последовательно с источником питания электромагнитного вибратора 3. Позицией 16 обозначена захватываемая деталь из токопроводного материала.
Центрирующий схват работает следующим образом.
При отводе жидкости в магистраль (не показана) через электромагнитный клапан 14 от двигателя привода 4 губок 1 происходит синхронное сведение губок. Захватываемая деталь 16 в случае ее смещения относительно призматических пазов 2 взаимодействует с упругими элементами 5, расположенными на поверхности губок 1. При этом через деталь 16 замь кается цепь питания реле 6 и контакт 10 закрьша- ется, замыкая цепь питания электро- магнитного клапана 14. Срабатьшая, клапан 14 прекращает отвод жидкости, и сведение губок 1 прекрап ается. Сра- батьшает также контакт 11, замыкая цепь электромагнитного вибратора 3, который приводит в движение губку 1. Колебания губки 1 происходят парал
лельно продольной оси схвата. Под действием этих колебаний и благодаря наличию упругих наклонных элементов деталь .,16 начинает перемещаться по направлению к граням паза 2, достиг- нув которого, она воздействует на упругие элементы 5, расположенные сим1 етрично по краям паза 2 одной из губок, замыкая электрическую цепь питания реле 7, которое срабатьшает и своим контактом 13 размыкает цепь электромагнитного вибратора 3, а контакт 12 размыкает цепь питания электромагнитного клапана 14. Открывается сливная магистраль и рабочая жидкость под действием пружины двигателя привода 4 сливается, губки 1 сходятся и происходит зажим детали 16, при этом окончательно деталь центрируется под действием граней призматического паза. 2.
Формула изобретения
Центрирующий схват, содержащий губки с призматическими пазами на рабочей поверхности, связанные с электромагнитным вибратором, соединенным с источником питания, и с приводом их плоскопараллельного перемещения, снабженным схемой управления, и установленные на рабочей поверхности губок по обе стороны от призматических пазов упругие элемен. З
Состави -ель Ф, Майоров Редактор К. Волощук Техред Л.Сердюкова Корректор А. Обручар
Заказ 7344/14 Тираж 949..Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. f.l5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
O
5
0
5
0
ты, расположенные под углом к этой поверхности с наклоном в сторону паза, отличающийся тем, что, с целью повышения надежности схвата в работе при захвате деталей из токопроводного материала, он снабжен двумя электромагнитными реле с источниками их питания, первое из которых имеет пару нормально разомкнутых контактов, второе - пару нормально замкнутых контактов, при этом все упругие элементы, расположенные на каждой губке, выполнены из токопроводного материала, часть упругих элементов, за исключением упругих элементов, расположенных по краям призматического паза, электрически соединены между собой и включены последовательно с источником питания первого реле, а упругие элементы, расположенные по каждому краю призматического паза по крайней мере одной из губок, электричес ки соединены между собой и включены последовательно с источником питания второго реле, при этом из нормально разомкнутых контактов первого реле и один из нормально замкнутых контактов второго реле включены последовательно в схему управления приводом, а другие контакты этих реле включены последовательно с источником питания элект|ромагнитных вибраторов.
J
иг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1192970A1 |
| Схват манипулятора | 1984 |
|
SU1283090A1 |
| Схват | 1983 |
|
SU1085811A1 |
| Схват | 1984 |
|
SU1180267A1 |
| Схват манипулятора | 1984 |
|
SU1194675A1 |
| Схват | 1986 |
|
SU1313700A1 |
| Схват манипулятора | 1984 |
|
SU1206081A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| Схват манипулятора | 1986 |
|
SU1360981A1 |
Изобретение относится к области машиностроения, а-именно .к захватным устройствам манипуляторов, предназначенных для проведения подъемно- транспортных работ с цилиндрическими деталями. Целью изобретения является обеспечение надежности схвата в работе при захвате деталей из токоX) &д . t
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
