Изобретение относится к технологическому оборудованию для перемещения заготовок из одной позиции в другую и может быть использовано в машиностроении и в других областях техники.
Цель изобретения - расширение технологических возможностей за счет обеспечения прямолинейных участков траектории перемещения схвата, повышение надежности за счет исключения кинематического размыкания между элементами кинематической цепи и точности позиционирования.
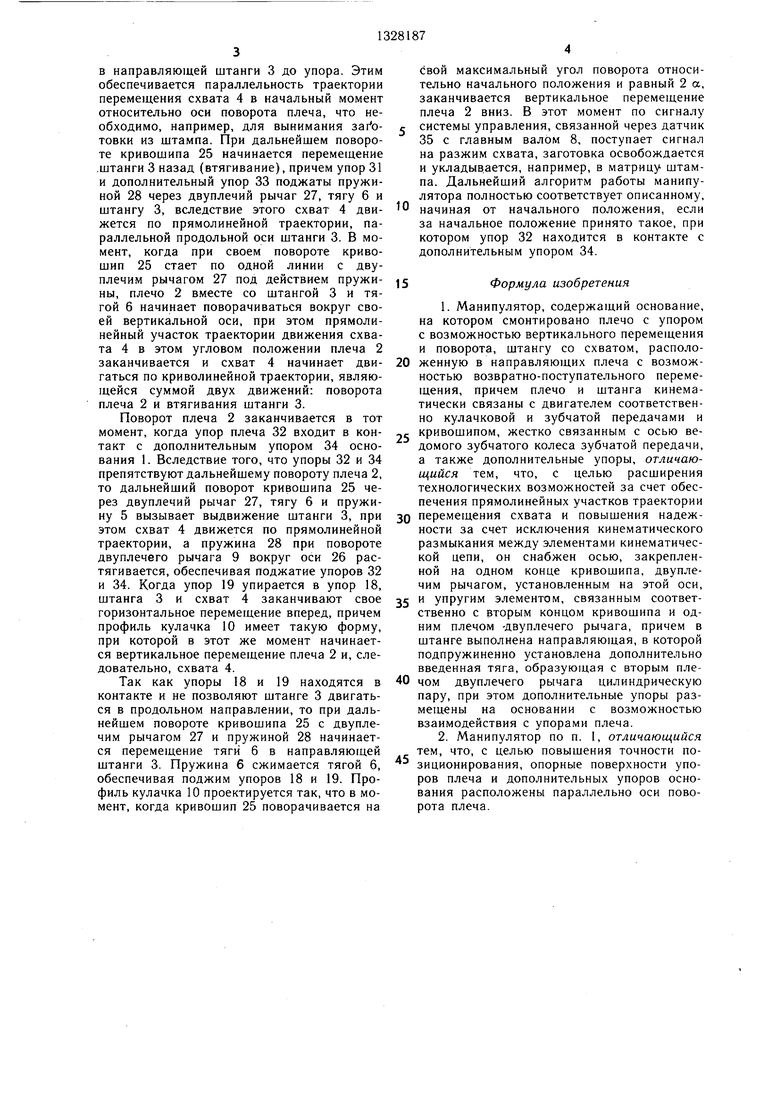
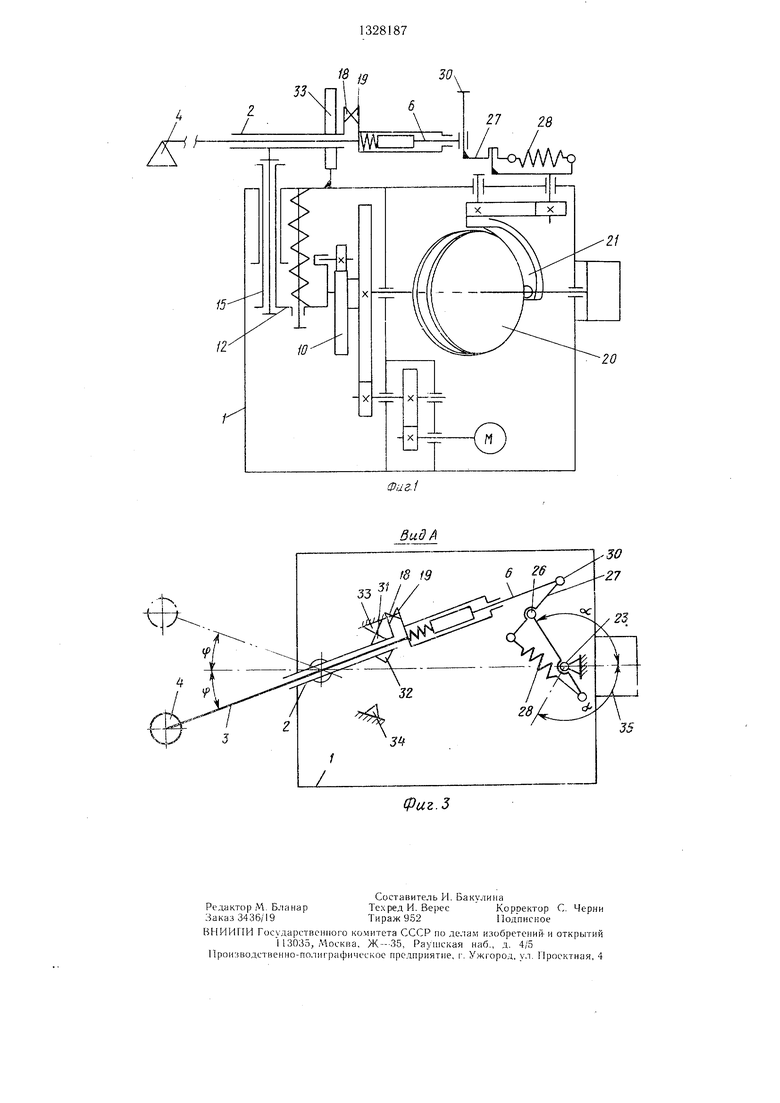
На фиг. 1 изображена кинематическая схема манипулятора в исходном положении штанги; на фиг. 2 - то же, при рабочем положении штанги; на фиг. 3 - вид А на фиг. 2.
Манипулятор содержит основание 1, на котором смонтировано плечо 2, и щтангу 3, расположенную в направляющих плеча 2. На одном конце штанги 3 закреплен схват 4, а на другом ее конце выполнена направляющая, в которой подпружиненно с помощью, например, пружины 5 установлена дополнительно введенная тяга 6.
Двигатель 7 кинематически связан с плечом 2 и штангой 3. На главном валу 8 жестко смонтировано зубчатое колесо 9, с которым связан выходной вал двигателя 7 через блок зубчатых колес. С зубчатым колесом 9 жестко связан кулачок 10 кулачковой передачи, ролик 11 которой установлен на толкателе 12, подпружиненном относительно основания с помощью пружины 13. В толкателе выполнено отверстие, в которое входит палец 14, жестко закрепленный на основании 1. Цилиндрическая часть 15 толкателя 12 установлена в направляющих 16 основания 1 с возможностью вращения и продольного перемещения. На толкателе 12 установлен поворотный несущий элемент 17 плеча 2, на торцовой поверхности плеча 2 установлен упор 18, взаимодействующий с упором 19 штанги 3. На главном валу 8 смонтирован пазовый кулачок 20, связанный с поводком 21 с помощью расположенного в его пазу ролика, шарнирно установленного на одном конце поводка 21, причем другой конец последнего жестко связан с зубчатым сектором 22 зубчатой передачи.
На оси 23 ведомого зубчатого колеса 24 зубчатой передачи закреплен кривошип 25, на одном конце которого закреплена ось 26, а на последней установлен двуплечий рычаг 27. Упругий элемент 28, например пружина, связан своими концами соответственно с одним плечом двуплечего рычага 27 и с вторым концом кривошипа. Причем второе плечо двуплечего рычага 27 образует с концом тяги 6 цилиндрическую пару, с помощью втулки 29 жестко связанной с тягой 6 и установленной на пальце 30, закрепленном на двуплечем рычаге 27 с воз0
5
0
5
0
5
0
5
0
5
можностью вращения и продольного перемещения. На боковых поверхностях плеча 2 установлены упоры 31 и 32, взаимодействующие с дополнительными упорами 33 и 34, установленными на основании 1, на котором закреплен датчик 35 системы управления, связанный с главным валом 8. Для обеспечения точности позиционирования опорные поверхности упоров 31 и 32 плеча и дополнительных упоров 33 и 34 основания расположены параллельно оси поворотного несущего элемента 17.
Манипулятор работает следующим образом.
За исходное положение принято положение (фиг. 1 и 3), при котором штанга 3 выдвинута в крайнее переднее положение, упор 18 плеча находится в контакте с упором 19 штанги, дополнительный упор 33 основания находится в контакте с упором 31 плеча, пружина 5 максимально сжата, обеспечивая поджатие упоров 18 и 19, кривошип 25 находится в крайнем положении, а пружина 28 растянута, обеспечивая поджатие упоров 31 и 33, плечо 2 со штангой 3, схватом 4, пружиной 5, тягой 6 и втулкой 29 находится в крайнем нижнем положении, где производится захват заготовки схватом 4 по сигналу системы управления, связанного с главным валом 8 через датчик 35. Заготовка берется, например, с устройства подачи заготовок. Вращение выходного вала двигателя 7 передается через блок зубча- тых колес на зубчатое колесо 9, главный вал 8, на пазовый кулачок 20 и кулачок 10. Последний обеспечивает при своем вращении вертикальное переме1цение плеча 2 манипулятора вверх с помощью ролика 11, обкатывающего профиль кулачка 10, и толкателя 12, при этом сжимается пружина 13, а от вращения толкатель 12 удерживается пальцем 14, чем обеспечивается правильное взаимодействие ролика 11 с кулачком 10, при котором ось ролика 11 должна быть параллельна оси главного вала. При подъеме плеча 2 вверх упор 31 плеча скользит по дополнительному упору 33. Условие параллельности поверхностей этих упоров относительно оси поворота плеча 2 обеспечивает необходимую точность позиционирования.
Вращение пазового кулачка 20 обеспечивает реверсивное вращение кривощипа 25 через поводок 21, зубчатый сектор 22, зубчатое колесо 24 и ось 23, жестко скрепленную с кривошипом 25. В начальный момент поворота кривошипа 25, когда совершается вертикальное перемещение плеча 2, тяга 6 перемещается в направляющей штанги 3, пружина 5 разжимается, причем кулачок 10 спрофилирован так, что вертикальное перемещение плеча 2 заканчивается в тот момент, когда тяга б доходит
в направляющей штанги 3 до упора. Этим обеспечивается параллельность траектории перемещения схвата 4 в начальный момент относительно оси поворота плеча, что необходимо, например, для вынимания товки из щтампа. При дальнейшем повороте кривошипа 25 начинается перемещение .штанги 3 назад (втягивание), причем упор 31 и дополнительный упор 33 поджаты пружиной 28 через двуплечий рычаг 27, тягу 6 и штангу 3, вследствие этого схват 4 движется по прямолинейной траектории, параллельной продольной оси штанги 3. В момент, когда при своем повороте кривошип 25 стает по одной линии с двуплечим рычагом 27 под действием пружины, плечо 2 вместе со штангой 3 и тягой 6 начинает поворачиваться вокруг своей вертикальной оси, при этом прямолинейный участок траектории движения схвата 4 в этом угловом положении плеча 2 заканчивается и схват 4 начинает двигаться по криволинейной траектории, являющейся суммой двух движений: поворота плеча 2 и втягивания штанги 3.
Поворот плеча 2 заканчивается в тот момент, когда упор плеча 32 входит в контакт с дополнительным упором 34 основания 1. Вследствие того, что упоры 32 и 34 препятствуют дальнейшему повороту плеча 2, то дальнейший поворот кривошипа 25 через двуплечий рычаг 27, тягу 6 и пружину 5 вызывает выдвижение штанги 3, при этом схват 4 движется по прямолинейной траектории, а пружина 28 при повороте двуплечего рычага 9 вокруг оси 26 растягивается, обеспечивая поджатие упоров 32 и 34. Когда упор 19 упирается в упор 18, штанга 3 и схват 4 заканчивают свое горизонтальное перемещение вперед, причем профиль кулачка 10 имеет такую форму, при которой в этот же момент начинается вертикальное перемещение плеча 2 и, следовательно, схвата 4.
Так как упоры 18 и 19 находятся в контакте и не позволяют штанге 3 двигаться в продольном направлении, то при дальнейшем повороте кривошипа 25 с двуплечим рычагом 27 и пружиной 28 начинается перемещение тяги б в направляющей щтанги 3. Пружина б сжимается тягой б, обеспечивая поджим упоров 18 и 19. Профиль кулачка 10 проектируется так, что в момент, когда кривошип 25 поворачивается на
свой максимальный угол поворота относительно начального положения и равный 2 а, заканчивается вертикальное перемещение плеча 2 вниз. В этот момент по сигналу
системы управления, связанной через датчик 35 с главным валом 8, поступает сигнал на разжим схвата, заготовка освобождается и укладыв.ается, например, в матрицу штампа. Дальнейший алгоритм работы манипулятора полностью соответствует описанному,
начиная от начального положения, если за начальное положение принято такое, при котором упор 32 находится в контакте с дополнительным упором 34.
15
Формула изобретения
1. Манипулятор, содержащий основание, на котором смонтировано плечо с упором с возможностью вертикального перемещения и поворота, штангу со схватом, располо0 женную в направляющих плеча с возможностью возвратно-поступательного перемещения, причем плечо и штанга кинематически связаны с двигателем соответственно кулачковой и зубчатой передачами и
с кривошипом, жестко связанным с осью ведомого зубчатого колеса зубчатой передачи, а также дополнительные упоры, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения прямолинейных участков траектории
0 перемещения схвата и повышения надежности за счет исключения кинематического размыкания между элементами кинематической цепи, он снабжен осью, закрепленной на одном конце кривошипа, двуплечим рычагом, установленным на этой оси,
5 и упругим элементом, связанным соответственно с вторым концом кривошипа и одним плечом -двуплечего рычага, причем в штанге выполнена направляющая, в которой подпружиненно установлена дополнительно введенная тяга, образующая с вторым пле0 чом двуплечего рычага цилиндрическую пару, при этом дополнительные упоры размещены на основании с возможностью взаимодействия с упорами плеча.
2. Манипулятор по п. 1, отличающийся тем, что, с целью повышения точности по зиционирования, опорные поверхности упоров плеча и дополнительных упоров основания расположены параллельно оси поворота плеча.
2i
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Манипулятор | 1984 |
|
SU1252161A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ), ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН, КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ОТПИРАНИЯ КАНАЛА СТВОЛА, КРИВОШИПНО-ПОЛЗУННОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, УСТРОЙСТВО БАЛАНСИРОВКИ МАСС ПОДВИЖНЫХ ЧАСТЕЙ И КОМПЕНСАЦИОННЫЙ СПОСОБ ОТПИРАНИЯ КАНАЛА СТВОЛА | 1998 |
|
RU2144171C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛИНЫ СТЕЖКА | 2002 |
|
RU2202016C1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
Изобретение относится к технологическому оборудованию для перемещения заготовок из одной позиции в другую и может быть использовано в машиностроении и в других областях техники. Целью изобретения является расширение технологических возможностей за счет обеспечения прямолинейных участков траектории перемещения охвата, повышение надежности за счет исключения кинематического размыкания между элементами кине.матической цепи и точности позиционирования. Для этого в штанге выполнена направляющая, в которой подпружиненно установлена тяга 6. Штанга 3 связана с возможностью вращения и продольного перемещения с двуплечим рычагом 27. При этом двуплечий рычаг 27 установлен на оси 26, жестко связанной с кривошипом 25, закрепленным на оси 23 ведомого зубчатого колеса 24. Упругий элемент 28 связывает между собой одно плечо двуплечего рычага 27 с вторым концом кривошипа 25. 1 з. п. ф-лы, 3 ил. А -Ж 629 30 /WsCZD СО ГО 00 СХ) -7 фиг. 2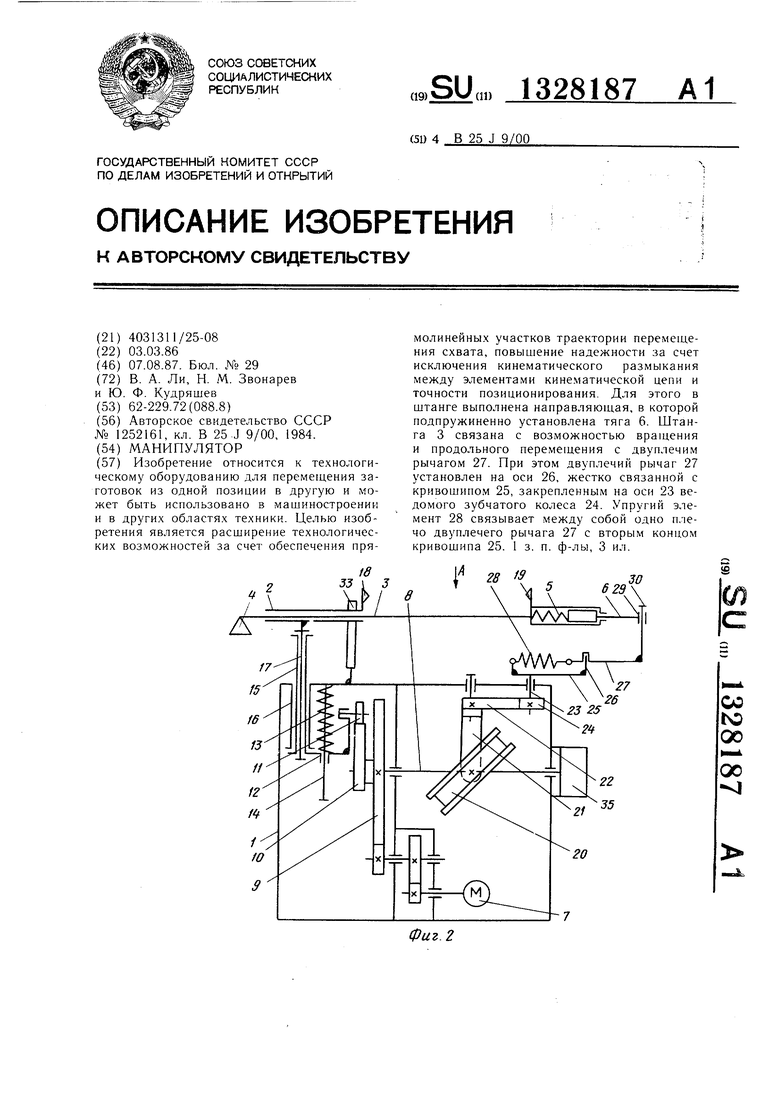
35
Фиг.З
| Манипулятор | 1984 |
|
SU1252161A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
