125216
2, Манипулятор по п.J , о т л и -линдрической проточки, глубина коточающийся тем, что проф иль--рой не более радиуса ролика кривоный паз планки выполнен в виде ци-шипа.
Изобретение относится к технологическому оборудованию для перемещения изделий из одной точки в другую и может быть использовано в машиностроении и других областях техники ,
Целью изобретения является расширение технологических возможностей за счет одновременного поворота и перемещения штанги и повышение точности позиционирования ,
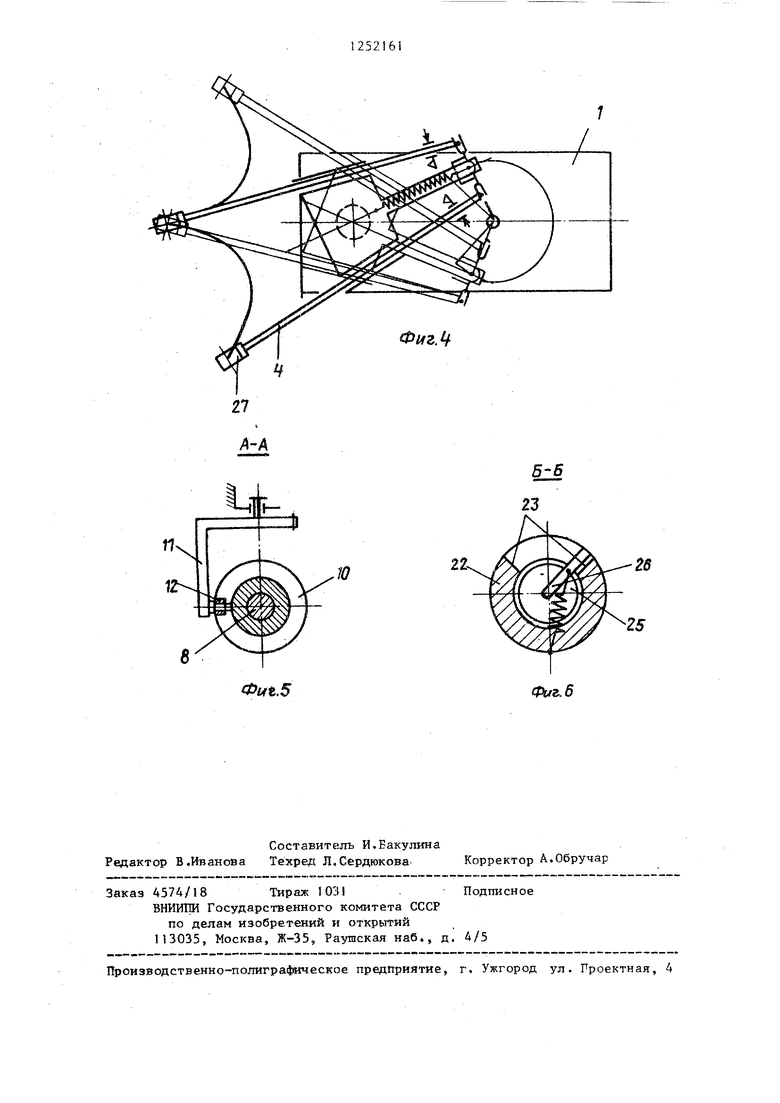
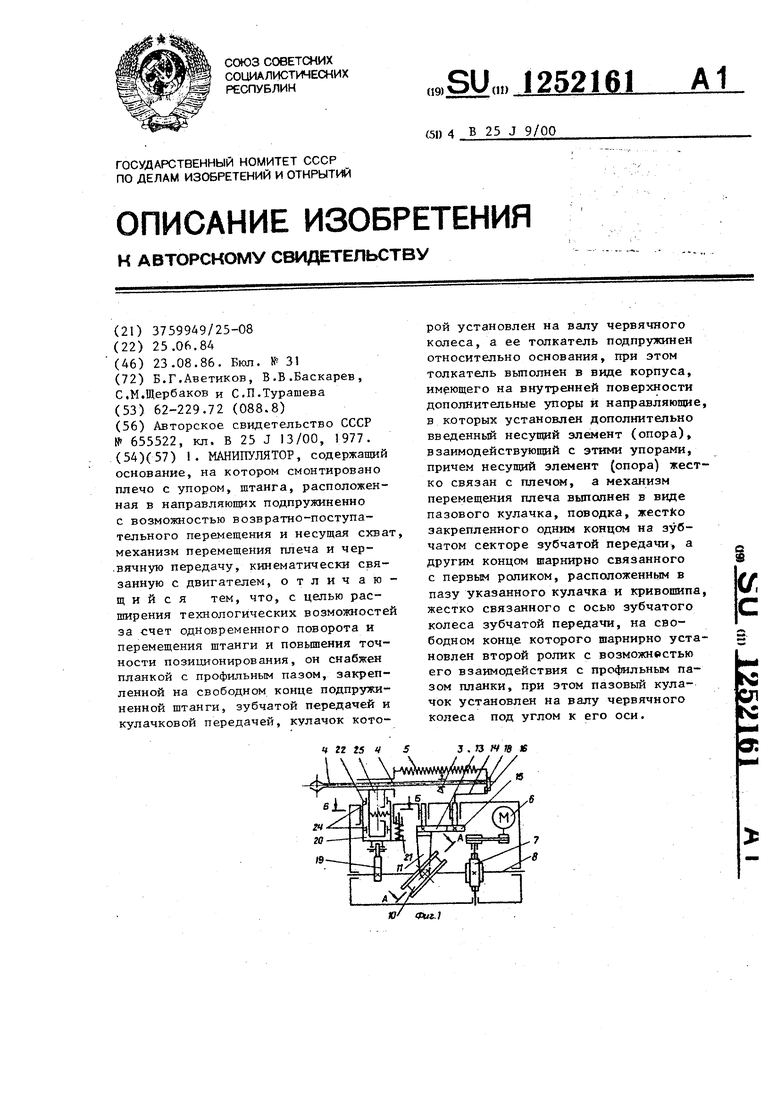
На фиг о 1 изображена кинематическая схема манипулятора; на фиг.2 - манипулятор, вид сверху; на фиг„3 - схема сопряжения ролика кривопшпа с пазом планки; на фиг.4 - вариант выполнения двухрукого манипулятора; на фиг,5 - сечение А-А на фиг Л; на фиг.6 - сечение Б-Б на фиг.. 1.
Манипулятор включает основание 1 ,, на котором смонтировано плечо 2 с упором 3, штанга 4, расположенная в направляющих плеча 2, подпружиненная посредством пружины 5, Двигатель 6 посредством червячной передачи 7 и вала червячного колеса 8 кинематичес ки связан с механизмом 9 перемещения плеча„ Механизм перемещения гщеча выполнен в виде смонт1 рованного на . валу червячного колеса 8 пазового кулачка 10, связанного с поводком 11 посред,ством расположенного в его пазу ролика 12, шарнирно установленного на одном конце поводка 11, другой конец которого жестко закреплен на зубчатом секторе. 13 зубчатой передачи,
При этом поводок 11 посредстом зубчатой передачи соехданен с кривошипом 14, жестко cвязш ны с осью зубчатого колеса 15 соответствующет передачи . На свободном конце :{сриво шипа 14 шарнирно установлен РО.ГШК 15, установленный с возможностью его взаимодействия с профильным пазом 1/ планки 18, закрепленной на свободно;. конце штанги 4, Кулачок 19 кулачко
5
0
j
вой пере-дачи установлен на валу червячного колеса 8 и кинематически связан с толкателем 20 этой же передачи ,. При этом толкатель 20 подпру- KiffleH относительно основания 1 посредством пружины 21 и выполнен в виде корпуса 22, и-меющего на внутренней поверхьзости дополнительные упоры 23, представляюнр е собой стенки паза, выполкенного в корпусе толкателя 22, и направляющие 24, в которых установлен дополкитально введенньй поворотный несущий элемент (опора) 25, жестко связанный с плечом 2 и взаимодействующий с этими дополнительными упорами 23 с возможностью обеспечения двусторонней пружинной связи, например, пружинньяч рЁ Чагом 2б с поворотным несущим элементом (опорой) 25.
Дпя обеспечения нормального да из зацепления ролика 12 кривошипа 14 в крайних положениях по повороту плеча 2 (при этом кривошип встает под углом 90 по отношению к оси штанги 4), необходимо, чтобы паз 17 на торцовой стенке планки 18 подпружине Гной штанги 4 был глубиной не более радиуса ролика 12 кривошипа 14, а меньше радиуса 12 паз П делать нецелесообразно, так как при повороте плеча 2 (штанги) от ннерционных нагрузок она может выйти из зацепления с роликом 12 5срквожипа 14 ,
При этом на одном конце штанги 3 акр епл ек ат 2 7.
Манипулятор работает следующим образом,
От двигателя 6 через червячную передачу 7 и вал червячного колеса 8 вращение одновременно передается на кулачок 19 и пазовый кулачок 10. В результате, зращения пазового кулачка 10 поводок И, входящий в паз хгулачка 10 и жестко связанный с зуб- чатым сектором 13 зубчатой переда- -Ш, совершает качателыше движение
3
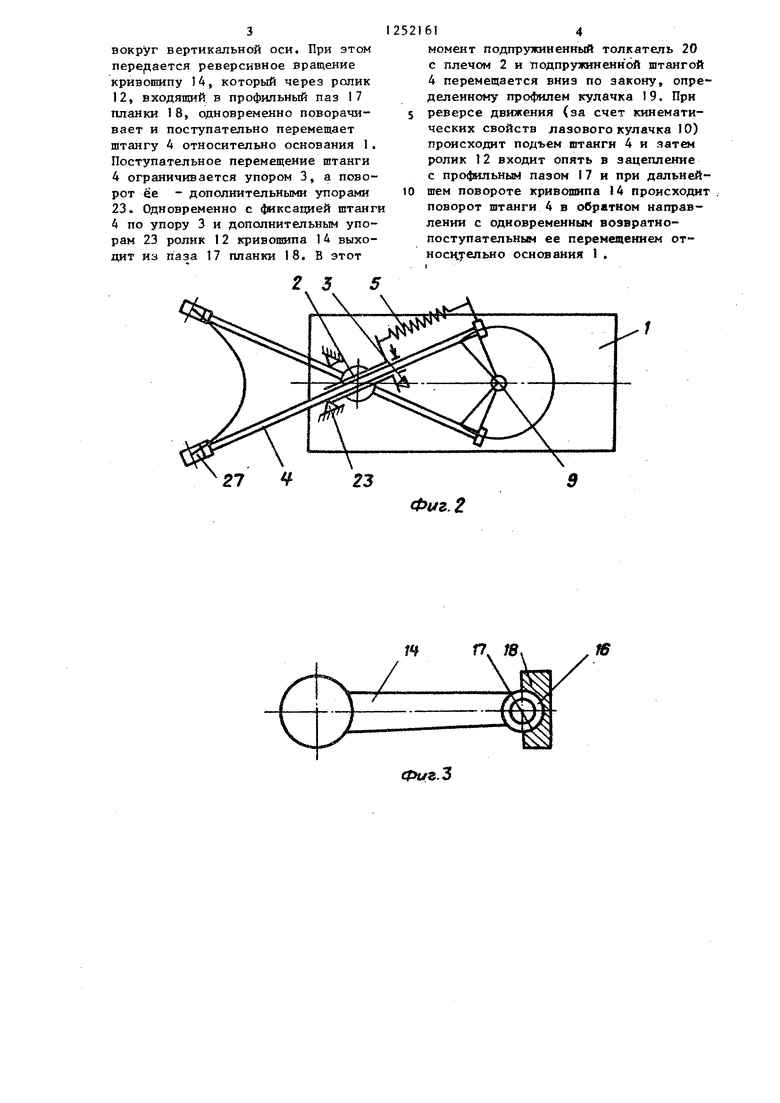
вокруг вертикальной оси. При этом передается реверсивное вращение кривошипу 14, который через ролик 12, входящий в профильный паз 17 планки 18, одновременно поворачи- вает и поступательно перемещает штангу 4 относительно основания 1. Поступательное перемещение штанги 4 ограничивается упором 3, а поворот ее - дополнительными упорами 23. Одновременно с фиксацией штанг 4 по упору 3 и дополнительным упорам 23 ролик 12 кривошипа 14 выходит из паза 17 планки 18. В этот
614
момент подпружиненный толкатель 20 с плечом 2 и подпружиненн ой штангой 4 перемещается вниз по закону, определенному профилем кулачка I9. При реверсе движения (за счет кинематических свойств лазового кулачка 10) прсжсходит подъем штанги 4 и затем ролик 12 входит опять в зацепление с профильным пазом I7 и при дальнейшем повороте кривошипа I4 происходит поворот щтанги 4 в обрвтном направлении с одновременным возвратно- поступательным ее перемещением от- носнт льно основания 1 ,
Фt4г.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1328187A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Манипулятор | 1988 |
|
SU1563966A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Станок для обработки кольцевого желоба переменного профиля | 1988 |
|
SU1645108A1 |
ф|/г.З
Фl4t.5
Составитель Й.Еакулина Редактор В.Иванова Техред Л.СердюковаКорректор А.Обручар
Заказ 4574/18Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-ЗЗ, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород ул. Проектная, 4
Фс/г.5
| Манипулятор | 1977 |
|
SU655522A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
