Изобретение отноштся к оборудованию механизации пакетироваюш грузов слоями.
Цепь изобретения - расширение технологических возможностей путем формирования слоев с различными схемами укладки.5
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Устройство содержит конвейер 1, над которым смонтированы направляющие для грузов, 10 одна из которых вьшолнена ступенчатой и г; представляет собой шарнирный механизм со звеньями, образующими паралеллограммы. Звенья 2 и 3 расположены под углом к продольной оси конвейера и образуют соответ- |5 ственко первую и вторую ступени. Звенья 4 и 5 связаны одним концом соответственно со ззеНьями 2 и 3, а другим - с общим звеном 6, при этом звено 3 связано с приводом 7 плоскопараллельного перемещени В шарнир- 20 кого механизма в горизонтальной плоскости. На. продолжении звена 5 закреплен упорный ролик 8, рабочая поверзшость которого лежит на одной линии с зтим звеном. На звене 4 шарнирио закреплена вторая направляющая 25 для грузов, представляющая собой шарнирный трехзвенник, рабочие грани которого, звенья
9и 10, образуют в развернутом положении
со звеном 4 шарнирного механизма параллелограмм, т. е. являются продолжением звеньев 2 и 5. Одно звено 9 расположено параллельно продольной оси конвейера 1, а другое звено
10- под углом к ней. Трехзвенник установлен с возможностью плоскопараллельного перемещения в горизонтальной плоскости посред- ством цепи 11, огибающей звездочки 12 и ..
имеющей перемещение от шарнирно закрепленного на раме коггаейера привода 13. Над конвейером смонтирована неподвижная направляющая 14, по которой перемещается поддерживающий шарнирный механизм ролик 15. Устройство работает следующим образом. Грузы подаются на конвейер. Подача производится с определенным тактом длинной стороной груза по ходу движения. При условии, что груз перемещается без разворота, шарнирный трехзвенник находится в положении, когда его звенья 9 и 10, т. е. рабочие грани, образуют со звеном 4 шарнирного механизма параллелограмм. Груз перемещается по зве--: ньям 2 и 10, затем но звеньям 9 и 5 и перемещением шарнирного механизма посредство привода 7 по направляющей 14 может быть направлен в« любое место механизма для формирования слоя (не показан) относительно направления перемещения груза - влево, вправо.Q
Если необходимо развернуть груз на 90 , шарнирньш трехзвенник посредством привода 13 С1сладывается так, что упорный ролик 8 имеет возможность контактировать с краем короткой. стороны груза. При этом груз, перемещаясь вдоль звеньев 2 и 4 шарнирного механизма, упирается краем в упорный Рол 8 и разворачивается cjporo на 90°, упираясь другим краем в звено 5, в таком положении груз подается на механизм формирования , слоя.
Выполнение направляющих стенок в виде шарнирных многозвенников позволяет укладывать грузы 10 любой схеме формирования слоя.
Вид А
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки подвесных конвейеров | 1984 |
|
SU1270085A1 |
| ПАНДУС РАЗДВИЖНОЙ (ВАРИАНТЫ) | 2013 |
|
RU2536516C2 |
| Устройство для укладки грузов в пакет | 1983 |
|
SU1194797A1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ГРАВИТАЦИОННЫ?СТЕЛЛАЖЕЙ^^..v-.-^jIJ П г ЬФ1Д ШШпЕГш! | 1970 |
|
SU435995A1 |
| Крутонаклонный ленточный конвейер | 1991 |
|
SU1801874A1 |
| Устройство для погрузки и разгрузки изделий, транспортируемых на полках подвесного конвейера | 1980 |
|
SU882892A1 |
| ПОДЪЕМНО-ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2039000C1 |
| Машина для штабелевки свежеотформованных керамических и силикатных изделий, принимаемых от прессов | 1959 |
|
SU126044A1 |
| Устройство для укладки паллеты | 2018 |
|
RU2785653C2 |
| ГРАВИТАЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР | 1972 |
|
SU334132A1 |
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ШТУЧНЫХ ГРУЗОВ В ПАКЕТОФОРМИРУЮЩИХ МАШИНАХ, содержащее конвейер, расположенные над ним направляющие для грузов первая направляющая. выполнена ступенчатой, а вторая - подвижная от привода - с двумя рабочими гранями, одна из которых параллельна продольной оси конвейера, а другая расположена под углом к ней, и упорный ролик для грузов, отличающееся тем, что, с целью расширения технологических возможностей путем формирования слоев с различными схемами укладки, первая и вторая направляющие установлены с возможностью плоскопараллельного горизонтального перемещения и представляют собой: первая - шарнирныймехамизм созвеньями, образующими параллелограммы, а вторая - шарнирный трехзвенник, закрепленный на располож шом за образующим первую ступень по ходу перемещения конвейера звене одного из параллелограммов шарнирного механизма с образованием с ним параллелограмма, а упорный ролик закреплен на расположенном за образуюi щим вторую ступень звене другого параллелограмма шарнирного механизма со стороны СЛ трехзвенника с размещением точмс его поверхности на линии, проходящш через это звено и являющейся касательной к указанной поверхности. со 4 СО t, t о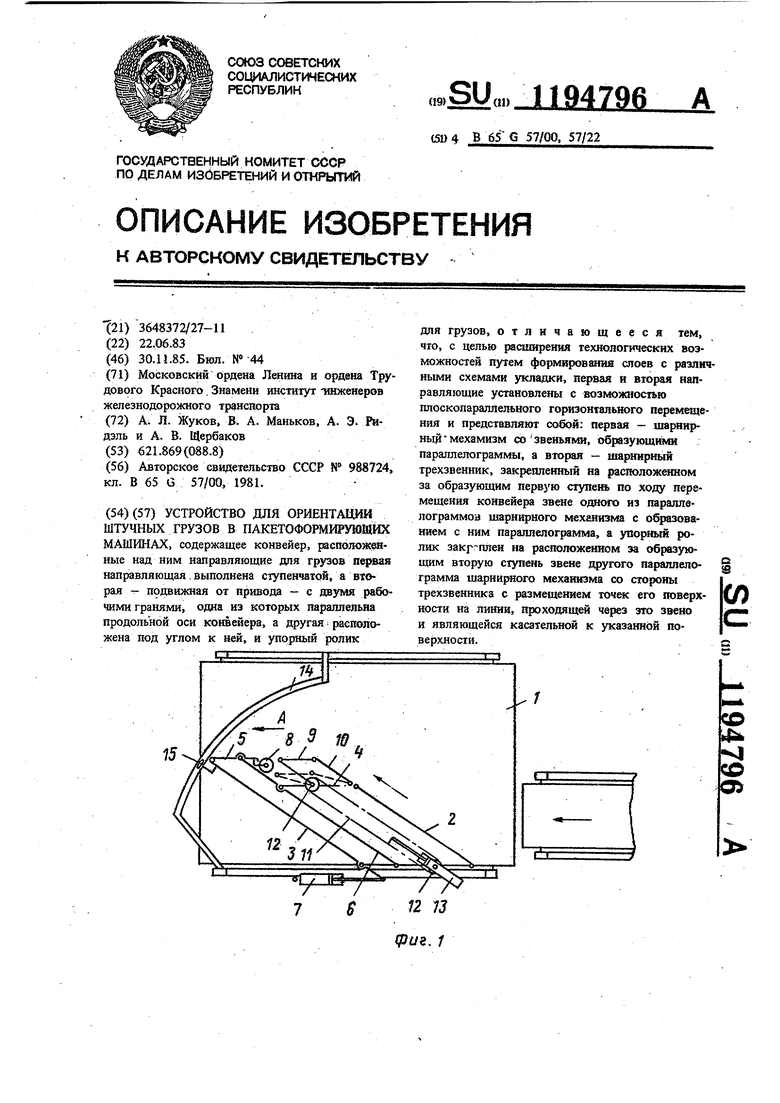
| Устройство для ориентации штучных грузов в пакетоформирующих машинах | 1981 |
|
SU988724A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
