(54) УСТРОПСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
напряжения управления, а также от действия возмущений по нагрузке. В этих условиях известное устройство должно иметь различные настройки, осуцествляемые с помогдыо подключения в качестве цепей коррекции внешних элементов (конденсаторов и резисторов ,. которые предварительно рассчитываются и экспериментально уточняются, что связано с увеличением объема пуско-наладочных работ.
Цель изобретения - повышение быстродействия при обеспечении устойчивости в условиях широкого изменения параметров и характеристик электропривода .
Поставленная цель достигается тем, что известное устройство, содержачее последовательно соединенные первый сумматор, и нтёгратор, второй сумматор и масштабный усилитель с узлом ограничения уровня напряжения, дополнительно снабжено нелинейным элементом, а такие последовательно соединенными эталонной моделью электропривода и блоком формирования сигнала ошибки, выход которого подключен ко второму входу масштабного усилителя; ме;кду выходом .масштабного усилителя и его третьим входом включен нелинейный элемент, входы эталонной модели и первого сумматора объединены и являются входом устройства, вторые входы первого сумматора блока формирования сигнала ошибки и второго cyf iMaTopa объединены и являются вторым входом устройства, выход второго cyf/iMaTOpa соединен с третьим входом первого сумглатора, выход масштабного усилителя является выходом устройства, управляющий вход нелинейного элемента соединен с третьим входом устройства, а общие точки эталонной модели, блока формирования сигнала ошибки, масштабного усилителя, первого и второго сумматора и интегратора объеди.нены и служат общим выводом устройства.
Кроме того, устройство отличается тем, что в нем эталонная модель выполнена н виде пассивного КС-фильтра на Тонк&пленочном резисторе и микроконденсаторе.
В устройстве масытйбный усилитель выполнен в виде операционного усилителя, в цепь обратной связи которого включены встречно-последовательно соединенные баэа-эмиттерные, переходы бескорпусных транзисторов.
Нелинейный элемент в устройстве выполнен в виде двух параллельных цепей, одна из которых содержит последовательно включенные резисторы общая точка которых является управляющим входом нелинейного элемента, а вторая содержит резистор и два встречно-параллельно соединенных
база-эмиттерных перехода бескорпусных транзисторов.
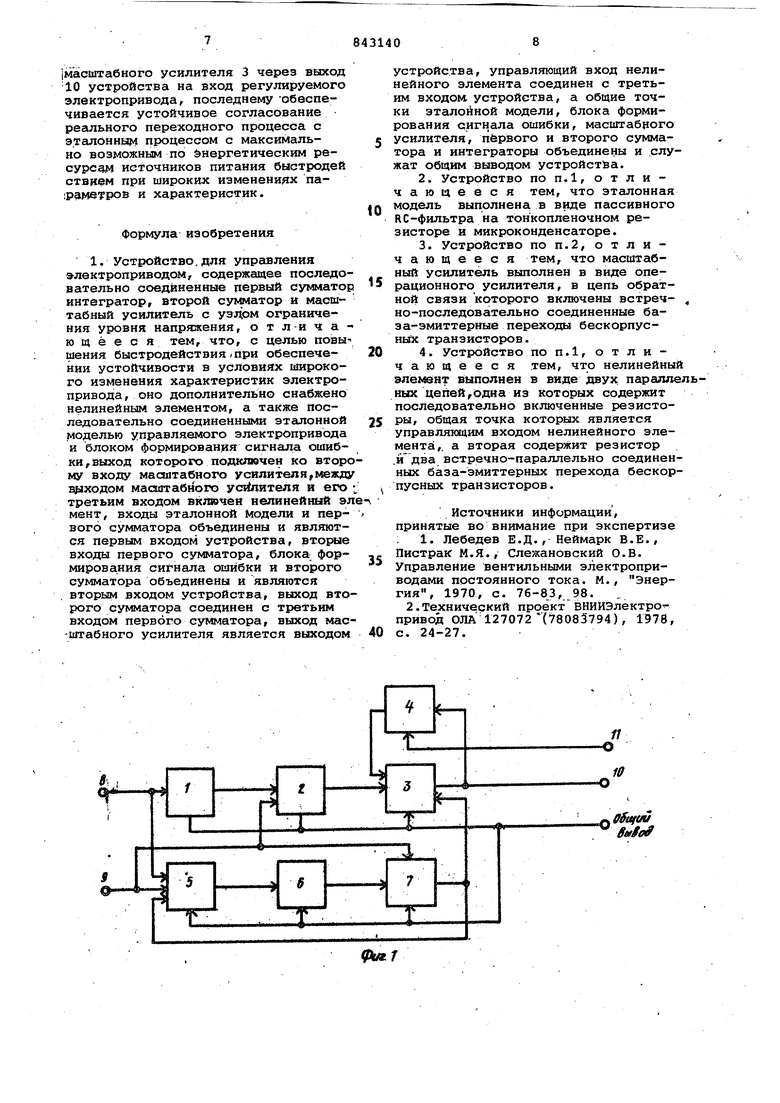
На фиг.1 изобра;хена функциональная схема устройства; на фиг.2 принципиальная схема.
Устройство (фиг.,1) содержит последовательно соединенные эталонную модель 1, блок 2 формирования сигнала ошибки, масштабный усилитель 3 с узлом ограничения уровня напряжения и нелинейный элемент 4, выход которого соединен со вторым входом масштабного усилителя 3, а также последовательно соединенный первый сумматор 5, интегратор 6 и второй сумрлатор 7, выход которого подключен к объединенным входам масштабного усилителя 3 и первого сумматора 5. Кроме того, вход эталонной модели 1 и второй вход первого сумматора 5 объединены и являются первым входом 8 устройства, первые входы блока 2 формирования сигнала ошибки и второго сумматора 7 объединены с третьим входом первого сумматора 5 и являются вторым входом 9 устройства, выход масштабного усилителя 3 подключен к выходу 10 устройства, второй регулировочный вход линейного элемента 4 является третьим входом 11 устройства, а общие точки эталонной модели 1, блока 2, усилителя 3, сумматора 5, интегратора б и второго сумматора 7 объединены и являются общим выводом устройства.
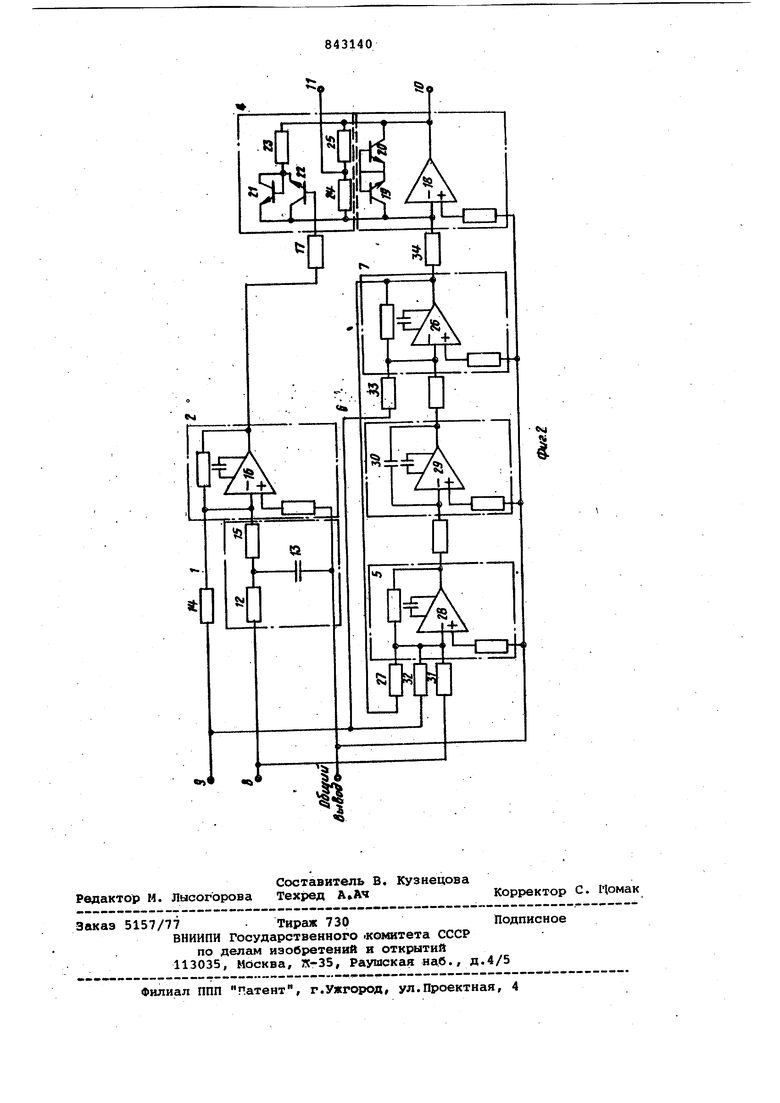
Устройство реализовано в соответствии с принципиальной схемой (фиг. и содержит операционные усилители с цепями коррекции, выполненными на микросхемах, и связи, выполненные н тонкопленочных резисторах и микроконденсаторах.
Устройство работает следующим образом.
Задающий сигнал, поступающий на вход 8 и являющийся одновременно управляющим сигналом для регулируемого, электропривода, подается на эталонную модель 1, реализованную в виде пассивного фильтра на тонкопленочном резисторе 12 и микроконденсаторе 13. На выходе эталонной модели (средняя точка между резистором 12 и микроконденс.атором 13.) формируется сигнал, соответствующий устойчивому с предельным быстродействием переходному процессу я электроприводе при стандартном (скачкообразном воздействии. Одновременно с этим поступакадий на вход 9. регулируемый сигнал, пропорциональный выходной координате электропривода (скорости, взятой с противополо:: ным знаком,подается через резистор 14 вместе с выходным сигналом эталонной модели, поступающим через резистор 15, на инверсный вход oneрационного усилителя 16, реализующе го блок 2 формирования сигнала ошибки, на выходе которого оценивается сигнал рассогласования между эталонньм переходным процессом, вырабатываемым моделью 1, и реальным переходным процессом электропри вода. Сигнал на выходе блока 2 формирования сигнала ошибки своей формой, длительностью и амплитудой характеризует степень отклонения реального переходного процесса от эталонного и его устойчивость при широком изменении параметров и характеристик электропривода, например, при изменении до десяти и более по кратности момента инерции двигателя при его замене что приводит к соответствующему изменению коэффициента усиления в контуре регулирования выходной координаты, а также при работе в ре жиме прерывистых токов и при изменении нагрузки. Далее сигнал с выхода операционного усилителя 16 подается через резистор 17 на инверсный вход операционного усилителя 18, реализующего блок масштабного усилителя 3 с узлом ограничения уровня напряжения, выполненного на паре встречно-последовательно соединенных база-коллекторных переходах бескорпусных транзисторов 19 и 20, подобранных так, чтобы установить уровень ограничения напряжения пять-семь В. Кроме того, в обратную связь операционного усилителя 18 бключен нелинейный элемент 4 содержащий) (две) цепи. Одна из них выполнена на паре встречно-параллел но соединенных база-эмиттерных переходах бескорпусных транзисторов 2 и 22, образующих вместе с тонкопленочным резистором 23 первую цепь обратной связи усилителя 18. Вторая цепь обратной связи образована резисторами 24 и 25, средняя точка которых подключена к регулироврч-ному входу 11. Нелинейный элемент 4 обуславливает зависимость коэффициента усиления масштабного усилителя от уровня входного сигнала, обеспечивая на малых уровнях (до одного в) очень большой коэффициент усиления (более 200), подготавливаемый цепью на резисторах 24 и 25 и подключенным между регулировочным входом 11 и общим проводом внешним регулируемым резистором, а при уровнях входного сигнала от одного до ограничения - на порядок меньший коэффициент усиления, обеспечиваемый резистором 23. Однако вырабатываемый масштабным усилителем (операционный..усилитель 18) сигнал, подаваемый на выход 10 еще не является окончательно сфор-. мированным для управления электропр водом путем осуществления согласова ния его реального переходного процесса с эталонным. Это происходит потому, что регулируеглый электропривод, как система управления, имеет порядок, не ниже второго, и введение выработанного масштабным усилителем 3 на вход, электропривода не обеспечивает устойчивого согласования переходным процессом в электроприводе с движением, предписываемым эталоЬной моделью 1. Поэтому существенным является то, что кроме вновь введенных эталонной модели 1, блока 2, нелинейного элемента 4 вводятся новые связи для вырабатываний с помощью первого сумматора 5, интегратора 6, второго сумматора 7 дополнительного сигнала к сигналу ошибки рассогласования, вырабатываемому блоком 2 формирования сигнала ошибки. Для этого выход операционного усилителя 26, реализующего сумг-чатор 7; через тонкопленочный резистор 27 подключен к инверсному входу операционного усилителя 28, реализующего первый сумматор 5. Образующийся из первого сумматора 5, интегратора 6, второго сумматора 7 замкнутый контур с включенным в него интегратором 6, реализованным на операционном усилителе 29 с емкостной обратной связью на микроконденсаторе 30, является фильтром первого порядка. На вход этого фильтра через тонкопленочные резисторы 31- и 32, подключенные к инверсному входу операционного усилителя; 28 первого сумматора 5, поступают соответственно задающий сигнал от входа 8 и регулируемый сигнал от входа 9, причем резисторы 31 и 32 подбираются так, чтобы сигналы были одинаковыми по величине после затухания переходных процессов в электроприводе и противоположны по знаку. Кроме того, через тонкопленочный резистор 33 регулируемый сигнал от входа 9 подается на инверсный вход операционного усилителя 26 ВТОЕЮГО сумматора 7 . В результате на выходе второго сумматора 7 вырабатывается сигнал, пропорциональный скорости изменения сигнала ошибки рассогласования реального и эталонного процессов. Выработанный вторым сумматором 7 сигнал с выхода операционного усилителя 26 подается через тонкопленочный резистор 34 на инверсный вход операционного усилителя 18 масштабного усилителя 3 и суммируется с сигисшом ошибки рассогласования, вырабатываемым операционным усилителем 16 блока 2 формирования сигнала ошибки, как было описано выше. Масштабный усилитель 3 с Нелинейным элементом 4 обрабатывает полученную сумму сигналов таким образом, что при поступлении выходного сигнала операционного усилителя 18 |масштабного усилителя 3 через выход 10 устройства на вход регулируемого электропривода, последнему -обеспечивается устойчивое согласование реального переходного процесса с эТЕШОнным процессом с максимально возможным по Энергетическим ресурсам источников питания быстродей ствкем при широких изменениях и характеристик. Формула изобретения 1. Устройство, для упрсШЛенин электроприводом, содержащее последовательно соединенные первый сумматор интегратор, второй сумматор и масштабный усилитель с уздом ограничения уровня напряжения, о т л-и ч а ю щ ё е с я тем, что, с целью повы шения быстродействия/при обеспечении устойчивости в условиях широкого изменения характеристик электропривода, оно дополнительно снабжено нелинейным элементом, а также последовательно соединенными эталонной моделью управляемого электропривода и блоком формирования сигнала ошибки, выход которого подключен ко второ му входу масштабного усилителя,между вдходом масштабного усилителя и его третьим входом включен нелинейшлй эл мент, входы эталонной Модели и первого сумматора объединены и являются первым входом устройства, вторые входы первого сумматора, блока формирования сигнала ошибки и второго сумматора объединены и являются вторым входом устройства, выход второго сумматора соединен с третьим входом первого сумматора, выход масштабного усилителя является выходом устройства, управляющий вход нелинейного элемента соединен с третьим входом устройства, а общие точки эталойной модели, блока формирования сигнала ошибки, масштабного усилителя, первого и второго сумматора и интеграторы объединены и служат общим выводом устройства. 2.Устройство по п.1, отличающееся тем, что эталонная модель выполнен в виде пассивного RС-фильтра на тонкопленочном резисторе и микроконденсаторе. 3.Устройство по п.2, отличаю щ е е с я тем, что масштабный усилитель выполнен в виде операционного усилителя, в цепь обратной связи которого включены встречно-последоваТельно соединенные база-эмиттерные переходы бескорпусны с транзисторов. 4.Устройство по п.1, отличающееся тем, что нелинейный элемент выполнен в виде цвух параллельных цепей одна из которых содержит последовательно включенные резисторы, общая точка которых является управлякщим входом нелинейного элемента,, а вторая содержит резистор .и два встречно-параллельно соединенных база-эмиттерных перехода бескорпусных транзисторов. Источники информации , принятые во внимание при экспертизе : 1. Лебедев Е.Д., Неймарк В.Е., Пистрак М.Я., Слежановский О.В. Управление вентильными электроприводами постоянного тока. м., Энергия, 1970, с. 76-83, 98. 2.Технический проект ВНИИЭлектро привод ОЛА 127072(78083794), 1978, с. 24-27.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Устройство для моделирования упругого гистерезиса | 1980 |
|
SU966708A1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Устройство для управления синхронно перемещающимися механизмами станка | 1981 |
|
SU985760A1 |