, Изобретение относится к пиевмогидроавтом тике и может быть использовано в устройствах автоматизации различного технологического оборудования. Целью изобретения является повышение быстродействия и точности слежения. На чертеже представлена принципиальная гидро-пневмо-кинематическая схема пневмогидравлического следящего привода. Пневмогидравлический следящий привод содержит исполнительный гидроцнлиндр 1, Пневмогидравлический преобразователь 2. давления, имеющий связанные общим штоком 3 пневмощшнндр 4 и гидроцилиндр 5, обе полости 6 и 7 которого через обратные клапаны 8 и 9 связаны с гидропневмоаккумулятором 10, а также с полостями 11 и 12 нсполнительного гидроцилиндра 1, и пневмогидравлическое управляющее устройство 13 с корпусом 14, жестко связанным с выходным злементом 15 исполнительного гидроцилиндра 1 и имеющим проточки 16-20 на внутренних оппозитных поверхностях 21 и 22 а также расположенный внутри корпуса 14 подпружиненный распределительный элемент 23, имеющий гидравлическую 24 и пневматическую 25 части, рппозитные наружные повер хности 26 и 27 которых имеют проточки .28- 33 и образуют плоский гидравлический распределитель 34, сообщенный с полостями 11 и 12 исполнительного гидроцилиндра 1, и с полостями 6 и 7 гидроцилиндра 5 пневмогидравлического преобразователя 2 давления, и плоский пневматический распределитель 35, сообщенный с полостями 36 и 37 пневмоцилиндра 4 пневмогидравлического преобразот вателя 2 давления, источником 38 давления и атмосферой и связанный с задатчиком вход ного сигнала 39. Части 24 и 25 распределительного элемента 23 связаны между собой через зубчатую передачу 40 с передаточным отношением больше единицы, опоры 41 и 42 которой зафиксированы относительно корпуса ,14. Пневмогидравлический следящий привод работает следующим образом. 7 При отсутствии входного сигнала or задагчика 39 гидравлическая 24 и пневматическая 25 части распределительного элемента 23 находятся в состоянии динамического равновесия, обеспечивающего равенство давлений в полостях 36 и 37 пневмоцилиндра 4 пневмогидравлнческого преобразователя 2 давления, При поступлении входного сигнала гидравлическая часть 24 распределительного элемента 23 перемещается относительно корпуса 14, например вправо. При этом полости 11 и 12 исполнительного гидроцилиндра 1 соответственно через проточки 17, 28 н 16, 30 соединяются с полостями 7 и 6 гидроцил1шдра 5 пневмогидравлического преобразователя 2 давления. Одновременно с перемещением гидравлической части 24 распределительного элемента 23 перемещается также вправо связанная с ней зубчатой передачей пневматическая часть 25. Поскольку передаточное отношение зубчатой передачи 40 больше еДиНИЦЫ} то пневматическая часть 25 перемещается на величину пропорционально передаточному отношению большую перемещения гид-. равлической части 24 в тот же интервал времени. В результате перемещения пневматической части 24 воздух от источника 38 . давления через проточки 19 и 32 поступает в полость 37 пневмоцилиндра 4 пневмогидравлического преобразователя 2 давления, а полость 36 через проточки 33 и 20 соеди-; ияется с атмосферой. Шток 3 перемещается влево и этим заставляет жидкость из полости 6 гидроцилиндра 5 через проточки 16 и 30 вытесняться в полость 12 исполнительного гидроцилиндра 1. Это, в свою очередь, приводит к смещению выходного элемента 15- и связанного с ним корпуса 14 вправо, часть жидкости из полости 11 исполнительного цилиндра 1 вытесняется через проточки 28 и 17 в полость 7 гидроцилиндра 5 пневмогидравлического преобразователя 2 давления. Исходное положение корпуса 14 относительно распределительного элемента 23 восстанавливается и движение выходного элемента 15 исполнительного гидроцилиндра 1 прекращается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящий привод | 1986 |
|
SU1325203A2 |
| Пневмогидравлический следящий привод | 1982 |
|
SU1025924A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| Пневмогидравлический усилитель привода сцепления транспортного средства | 1983 |
|
SU1133130A2 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1562542A1 |
| Пневмогидравлический следящийпРиВОд | 1978 |
|
SU802657A1 |
| Пневмогидравлический привод | 1984 |
|
SU1247585A1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
| Пневмогидравлическая система | 1988 |
|
SU1663249A1 |
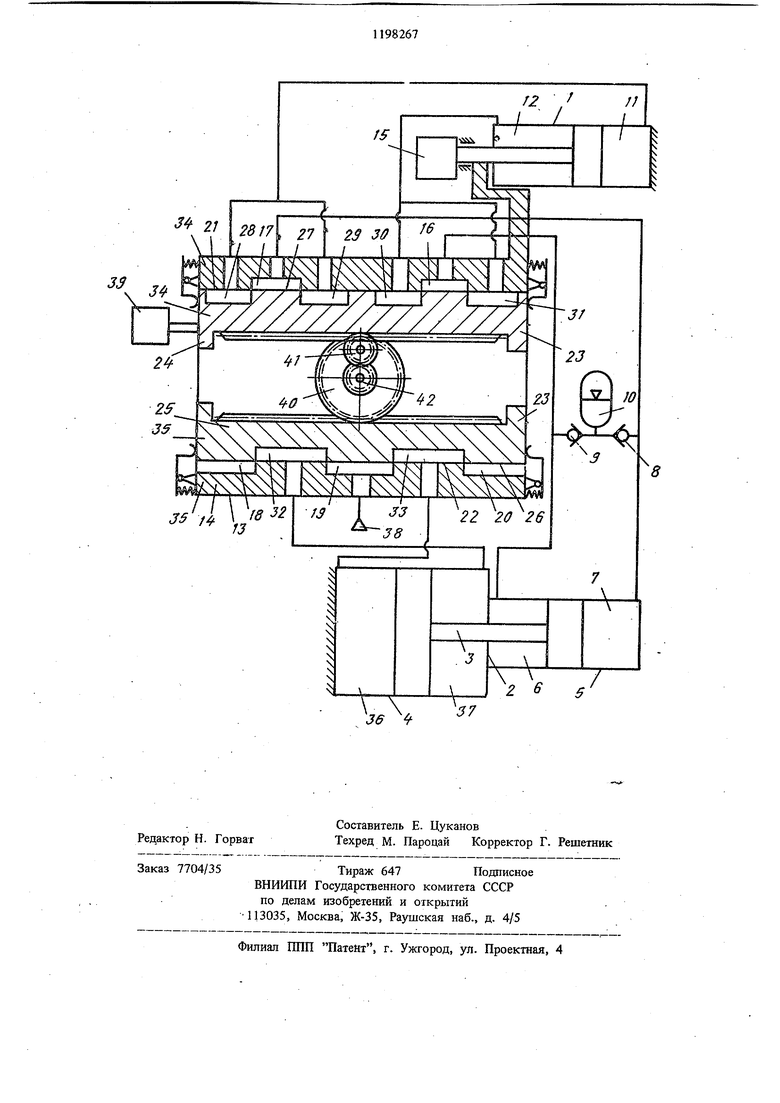
ПНЕВМОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД, содержащий исполнительный гидроцилиндр, пневмогидравлический преобразователь давления, имеющий связанные общим штоком пневмоцилиндр и гидроцилиндр, обе полости которого через обратные клапаны связаны с гидропневмоаккумулятором, а также с полостями исполнительного гидроцилиндра, и пневмогидравлическое управляющее устройство с корпусом, жестко связанным с выходным элементом исполнительного гидроцилиндра и имеющим проточки на внутренних оппозитных поверхностях, а также расположенный внутри корпуса подпружиненный распределительный элемент, имеющий гидравлическую и пневматическую части, оппозитные наружные поверхности которых имеют проточки и образуют плоский гидравлический распределитель, сообщенный с полостями исполнительного гидроцилиндра и гидроцилиндра пневмогндравлического преобразователя давления, и плоский пневматический распределитель, сообщенный с полостями пневмоцилиндра пневмогидравлическсго преобразователя давления, источником давления и атмосферой -: связанный с задатчиком входного сигнала, отличающийся (Л тем, что, с целью повыщения быстродействия и точности слежения, части распределительного элемента связаны между собой через зубчатую передачу с передаточным отношением больше единицы, опоры которой зафиксированы относительно корпуса. со 00 IND Од 
| Пневмогидравлический следящий привод | 1982 |
|
SU1025924A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
