Изобретение относится к машиностроению, а именно к устройствам, являющимся исполнительным органом манипуляторов, предназначенных для съема и переноса изделий.
Цель изобретения - упрощение конструкции путем исключения автономного привода каждого выталкивателя.
На фиг.1 показано устройство захватное j вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг. 3 - расчетная схема устройства.
Захватное устройство содержит корпус 1, на котором расположены захватные элементы 2. Корпус 1 имеет направляющие 3, по которым может вертикально перемещаться кронштейн 4, закрепленный на руке 5 манипулятора На корпусе 1 в опорах 6 установлены валы 7, на которых закреплены качающиеся выталкиватели 8, выполненные в виде Г-образных рычагов.
Привод выталкивателей 8 осущедт- вляется через консольные рычаги 9, усл ановленные на валах 7 и свободным концом вставленные между опорными поверхностями кронштейна 4. Дпя . уменьшения трения выталкивателей 8 . по пресс-форме на их концах установлены ролики 1 О.
Захватное устройство работает следующим образом.
Рука 5 манипулятора опускает захватное устройство на изделие, при этом выталкиватели 8 ложатся ролика ми 10 на пресс-форму вне контура гнезда. Захватные элементы 2 сцепляются с изделием. При подъеме руки 5 манипулятора кронштейн 4 перемещается по направляющим 3 вверх относительно корпуса 1 захватного устройства. Кронштейн 4 нижней опорной поверхностью давит на свободные концы консольных рычагов-9, поворачивая валы 7 в опорах 6. Выталкиватели 8, жестко соединенные с валами 7, качаются вниз, нажимая роликами 10 на пресс-форму. Суммарная сила реакции пресс-формы и усилия манипулятора -через выталкиватели 8 валы 7, опоры 6, рычаги 9 поднимает корпус 1 с удерживаемым изделием вверх. При упоре кронштейна 4 в опорные шляпки направляющих 3 рука 5 манипулятора поднимает захватное устройство и осуществляется перенос,
Дпя наглядности и простоты рассмотрим равновесие одного рычага.
обозначенного на фиг.3 буквами ABC. Поскольку движение рычага происходит равномерно с очень малыми скоростями, силы инерции не учитывают.
На рычаг ABC действует система сил.
Рц - доля усилия манипулятора, равная (при равномерном распределе- нии) общему усилию манипулятора деленному на число рычагов в захватном устройстве, направленная вертикально вверх при горизонтальном положении плеча ВС рычага.
F.. - часть силы сопротивления извлечению изделия из пресс-формы, приходящаяся на один рычаг. При равномерном распределении равна общей силе сопротивления, деленной на число рычагов в захватном устройстве. Направлена вертикально вниз,
Т сила нормальной реакции пресс- формы на рычаг. При -горизонтальной поверхности пресс-формы направлена
вертикально вверх.
FT
р
сила трения горизонтальному движению ролика по поверхности пресс-формы.
F Т f -гр -
где f - коэффициент трения.
Р - силы горизонтальной реакции опор осей вращения рычагов, которые воспринимаются рамой и взаимно уравновешены. Работы на совершают.
Рычаг ABC абсолютно жесткий и в - процессе движения угол ABC не меняется.
Проведем ось X горизонтально че- рез центр вращения ролика, ось у.вертикально через шарнир В вращения рычага. На пересечении осей - точка 0.
Проектируем силы на ось у. При равновесии системы имеем:
Т - F, F О Т РИ н
Дают системе виртуальное (возможное вертикальное) перемещение:
, но 8 у 7 0.
Рычаг займет положение А,В,С,.
Точка А переместится горизонтально на S АА,, точка В переместится вертикально на м , точка С переместится по криволинейной траектории, но при бесконечно малых углах гтере- мещение будет вертикальным.
а
г; с иЬ
а бХ
По теореме о виртуальных перемещениях известно, что сумма элеметарных работ всех сил, действующих на равновесную систему равна нулю.
-Ч .&y 0.
Выражают элементарные перемеще- ния точек рычага через . , длины плеч рычага и первоначальный угол наклона плеча толкателя ср .
Из ЛАОВ АВ 1 - длина плеча толкателя.
Из Л А,ОВ(
Е ОА +ОВ (ОА- &) -+ (ОВ+ 5,j )
ОА -20А& + S +OB%20B S ,j+8y .
Приравнивают квадраты плеч толкателя
ОАЧОВ ОА -20А &..+ 5 +OB +20B-L
р4 X а
+ 5,, .
Приводя подобные члены и опуска квадраты бесконечно малых величин вследствие высшего порядка малости ти, имеют:
20А-&Х ОБ
Поворот рычага на элементарный угол8и- 0 находят из Л ABB, и ЬВВ, в|, полученных параллельным переносом отрезка A;Ii, на величину S в точку А.
Из Л АВВВ,
ВВ,
Р-р sin Sq , S(f
Из йвв,в;
tg q
В„
а
9 1 cosV
Jl
COSCJJ
- у тг
- cos Cf
Подставляют в уравнение элементарных работ;
-f (F,-F).S..tgrF.S.-t-F.S, ,
. Jx . о,
COS.tf
Sy(f-F.tg(f-f-F,. +
+ F .llL 0 « E,.
делят на uu 0. -Fi(H-f-tgtp)+F(f-tgtf +
0;
jT cosq + P E -cosq
costf if sin4 4 coscf
FU(
r c Llflsin +fj.-costf ,, .
« J c7n-
COSCf
25
-F il 2s4 +fisinct.2-br. « E, (cos4 +f sini|)
F
1 +
e,
(cos(f +f sincf
При острых углах « второй член формулы всегда положителен и, следовательно PU м ® лие извлечения изделия из пресс- формы выше грузоподъемности манипулятора .
Меняя соотношение длин рычагов и толкателей за счет запаса вертикального хода манипулятора можно получить необходимое усилие извлечения
изделия.
Формула изобретения
Устройство захватное, содержащее корпус, на котором с одной стороны закреплены вакуумные присосы, а с другой - выталкиватели, связанные с кронштейном, установленным о возможностью перемещения по направляющим, отличающееся тем, что, с целью упрощения конструкции путём исключения автономных приводов каждого выталкивателя, последние выполнены в виде Г-образных рычагов, установленных с возможностью поворота на корпусе и связанных с кронштейном.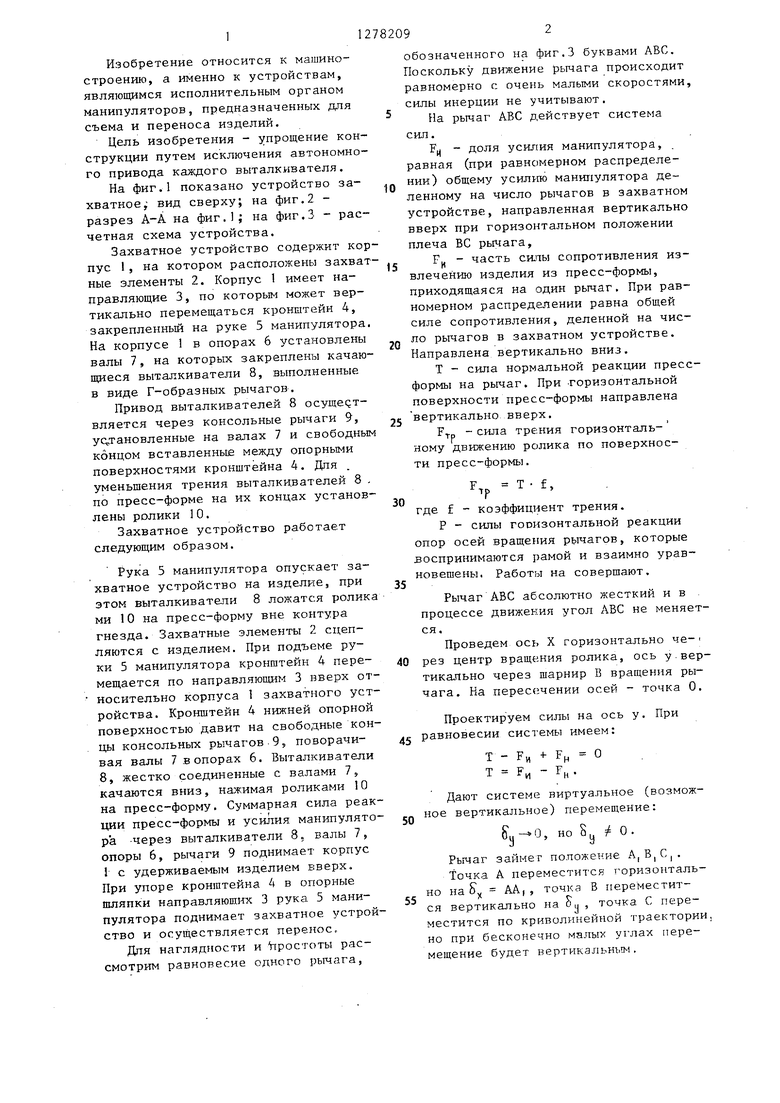

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1983 |
|
SU1199615A1 |
| Транспортный ротор | 1990 |
|
SU1738735A1 |
| Машина для сварки трением | 1986 |
|
SU1400826A1 |
| Манипулятор к прессу | 1986 |
|
SU1339011A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Литьевой модуль ротационной машины для изготовления изделий из термопластичных материалов | 1983 |
|
SU1324857A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Манипулятор | 1987 |
|
SU1423368A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |

Изобретение относится к захватным устройствам манипуляторов и может быть использовано для съема и переноса деталей в процессе обработки. Цель изобретения - упрощение конструкции. В корпусе 1 с одной стороны расположены захватные элементы 2. С другой стороны корпуса с возможностью поворота установлены - . Г-образные рычаги 8, играющие роль выталкивателей. Рычаги 8 связаны с кронштейном 4, перемещаемым по направляющим 3 посредством руки 5 манипулятора. Рука 5 опускает захватное устройство на изделие, при этом выталкиватели 8 ложатся роликами 10 на пресс-форму вне контура его гнезда. Захватные элементы 2 сцепляются с изделием. При подъеме руки 5 кронштейн 4 перемещается по направляющим 3 вверх и поворачивает рычаги 8, которые стремятся поднять корпус 1 с изделием. Обеспечивается из- витечение изделия из пресс-формы с усилием, большим усилия манипулятора. 3 нл. i (Л N5 00 ю о ;о .2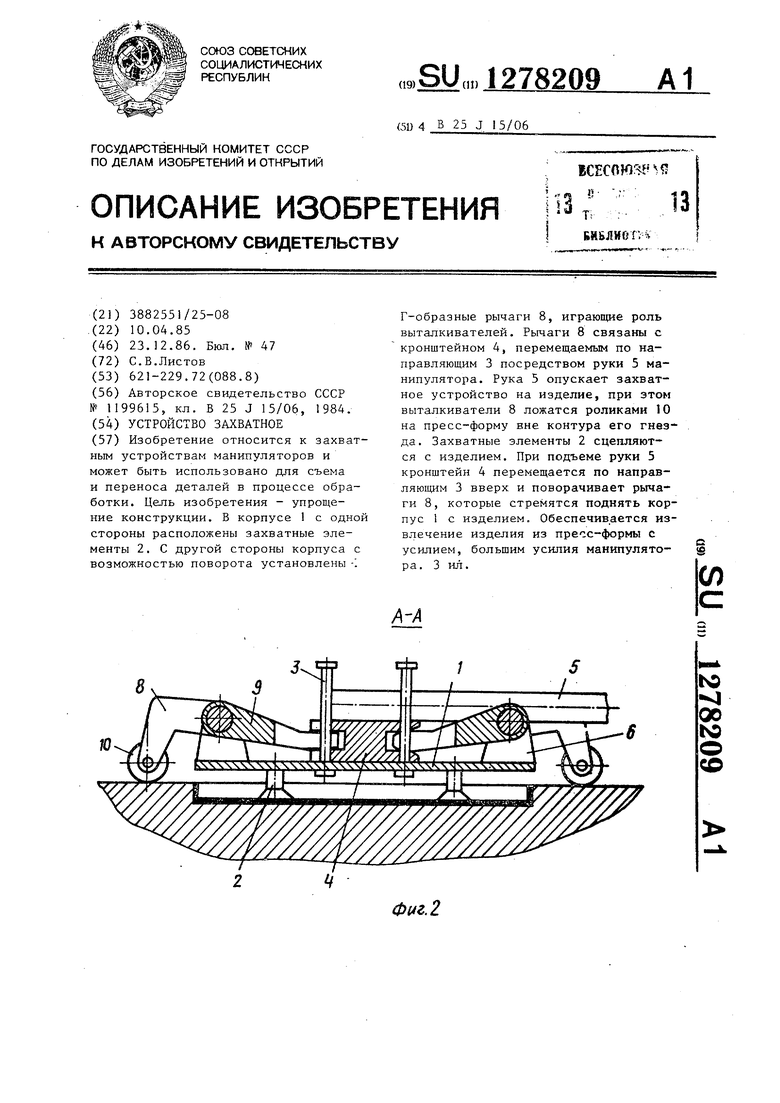
тр
Фмг. 3
| Захватное устройство | 1983 |
|
SU1199615A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
