tUott
Изобретение относится к машиностроению и может быть использовано в конструкциях захв1атных устройств роботов-манипуляторов.
Целью изобретения является повышение надежности работы за счет увеличения степени разрежения в подпорш- йеной полости.
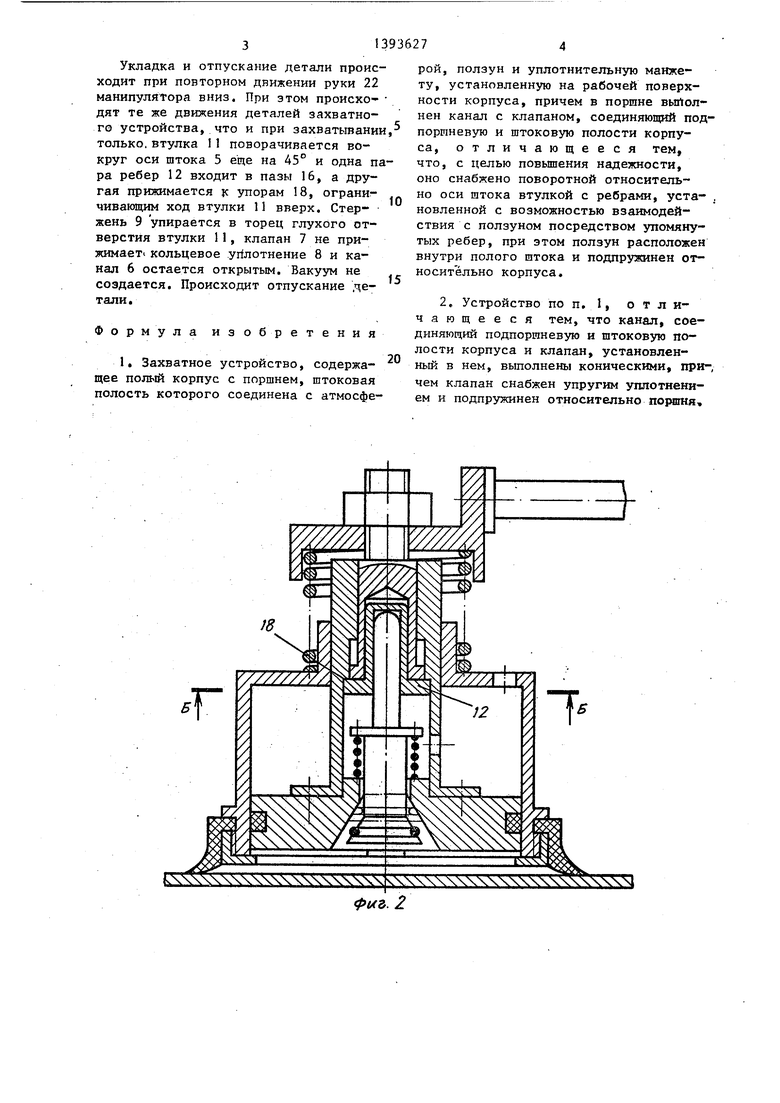
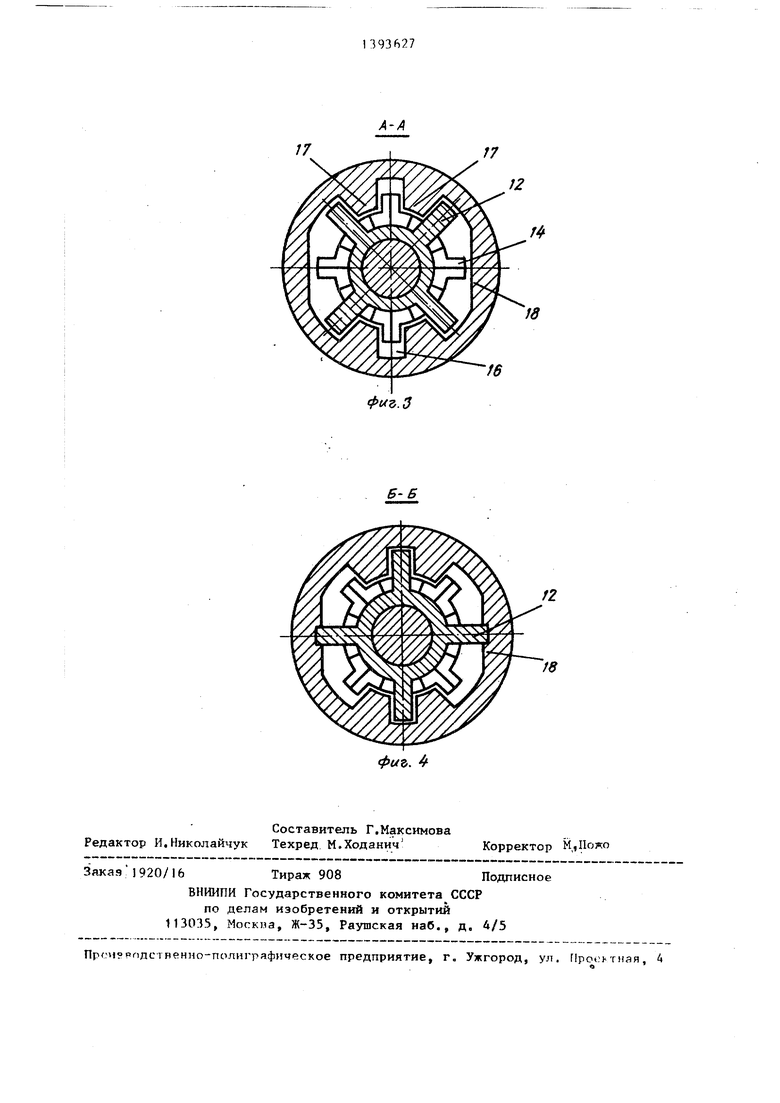
На фиг. 1 изображено захватное устройство в верхнем предельном положении ползуна и при закрытом клапане, общий вид} на фиг. 2 - то же, при нижнем положении поршня и открытом клапане; на фиг. 3 - разрез А-А на фиг.Ц йа-фиг. 4 - разрез Б-Б на фиг. 2,
Захватное устройство содержит полый корпус 1f внутри которого расположен подвижный прршень 2 с уплотнением. На рабочей поверхности корпуса 1 установлена уплотнительная манжета 3, поджатая к корпусу I гайкой 4. С поршнем 2 жестко соединен полый шток 5, установленный с возможностью скольжения в отверстии верхней части корпу- са 1.
Поршень 2 имбет канал 6 конической формы, соединяющий подпоршневую и штоковую полости. В канале 6 расположен конический клапан 7 с упругим кольцевым уплотнением 8 и стержнем 9. Клапан 7 поджимается к каналу 6 пружиной 10 сжатия, установленной между . буртиком стержня 9 и поршнем 2.Верхняя часть стержня 9 вставлена в глухое отверстие поворотной втулки 11, имеющей четыре накрест лежащих ребра 12 сверху со скосами 13, взаимодействзлощими с наклонными торцевыми зубьями
14ползуна 15, расположенными на его нижней расширенной части. Боковые поверхности, зубьев 14 ползуна 15 вставлены в пазы 16 внутренней полости штока 5, преп тствующие повороту ползуна 15 и ограниченные-направляющими
17, которые имеют направленные в одну сторону скосы под углом скосов 13 ребер 12 и зубьев 14. Перпендикулярно пазам 16 в полости штока 5 выполнень упоры 18. Ребра 12 втулки 11 могут находиться в пазах 16, при этом вто- рая пара ребер 12 упирается в упоры 18.или.между пазами 16, вдоль направляющих 17, и иметь возможность, перемещаться вьше упоров 18, rfa ползуне
15установлена гайка 19, фиксирован- ная от поворота контргайкой 20. Между гайкой 19 и корпусом 1 установлена пружина 21 сжатия, усилие предварительного сжатия которой обеспечивает преодоление силы трения поршня 2, веса подвижных частей и создает необходимое разрежение. Захватное устройство крепится к руке -22 манипулятора посредством гайки 19.
Захватное устройство работает следующим образом.
Рука 22 манипулятора опускает ползун 15 и сжимает пружину 21. Зубья 14 ползуна 15, выбирая зазор, соприкасаются с вершинами скосов 13 ребер 12 и создают усилие, стремящееся повернуть в противоположные стороны ползун 15 и втулку 11. Но пока зубья 14 и .ребра 12 находятся во взаимодействии с направляющими 17 поворота не происходит, а происходит совместное опускание ползуна 15 и втулки II, при этом зубья 14 расположены в пазах 16. При опускании втулка 11 торцом глухого отверстия давит на стержень 9, который сжимает пружину 10 и отводит клапан 7 с кольцевым уплотнением 8 от канала 6. При выходе ребер 12 за пределы направляющих 17 происходит noBcfpoT втулки 1 1 относительно штока 5 на угол 20°. При дальнейшем опускании ,руки 22 гайка 19 давит на торец штока 5 и дальнейшее опускание ползуна 15 происходит совместно со штоком 5, связанным с поршнем 2. При этом из подпоршневой полости через открытый канал 6 вытесняется воздух.
При подъеме руки 22 сила сжатия пружины 21 давит на гайку 19 и на корпус 1, обеспечивая необходимое прижатие уплотнительной манжеты 3 к детали. Ползун 15 поднимается.. освобождая втулку 11, в KOTOp: To упирается поджатый пружиной 10 стержен 9 клапана 7. Происходит их совместный подъем. При этом скосы 13 ребер 12, cкoJшзя по скосам направляющих 17, поворачивают втулку 11 еще на угол 25 (всего за двойной ход 45°), ребра 12 скользят по направляющим 17 в отверстии штока 5, не встречая упоров 18 до тех пор, пока пружина 10 не прижмет упругое кольцевое уплотнение 8 к каналу 6, закрывая его. При дальнейшем подъеме ползуна 15 расширенная его часть верхним торцом упирается в уступ штока 5 и начинается совместный подъем ползуна 15, штока 5 и поршня 2. При этом создается разрежение в подпорвшевой полости корпуса 1. Происходит захват детали.
Укладка и отпускание детали происходит при повторном движении руки 22 манипулятора вниз. При этом происхо- дят те же движения деталей захватного устройства, что и при захватывании, только.втулка I1 поворачивается вокруг оси штока 5 еще на 45° и одна пара ребер 12 входит в пазы 16, а другая прижимается к упорам 18, ограничивающим ход втулки 11 вверх. Стержень 9 упирается в торец глухого отверстия втулки 11, клапан 7 не при- жимает кольцевое .уг(лотнение 8 и канал 6 остается открытым. Вакуум не
10
15
создается, тали.
Происходит отпускание деФормула изобретения
1. Захватное устройство, содержа- щее полый корпус с поршнем, штоковая полость которого соединена с атмосфе0
5
рой, ползун и уплотнительную манжету, установленную на рабочей поверхности корпуса, причем в поршне вьйол- нен канал с клапаном, соединяющий под- поршневую и штоковую полости корпуса, отличающееся тем, что, с целью повьшгения надежности, оно снабжено поворотной относительно оси штока втулкой с ребрами, уста- , новленной с возможностью взаимодействия с ползуном посредством упомянутых ребер, при этом ползун расположен внутри полого штока и подпружинен относительно корпуса.
2, Устройство по п, 1, отличающееся тем, что канал, соединяющий подпоршневую и штоковую полости корпуса и клапан, установленный в нем, выполнены коническими, при-,
чем клапан снабжен упругим уплотнением и подпружинен относительно поршня.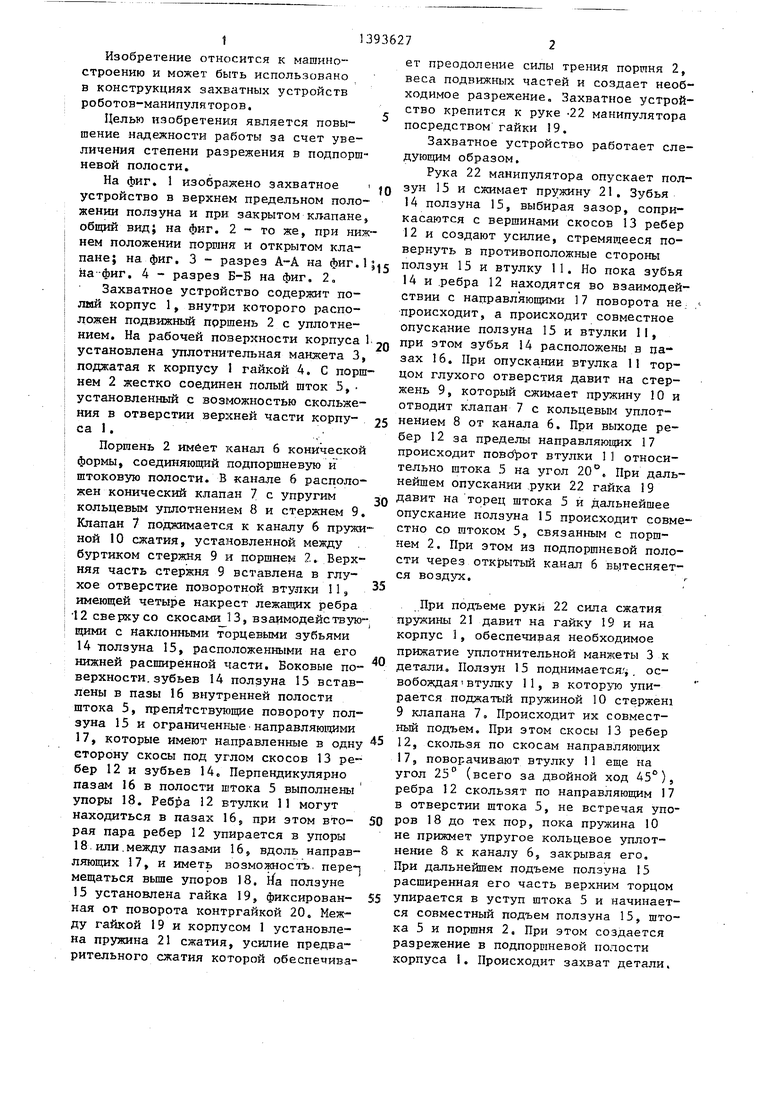
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Телескопический гидравлический амортизатор | 1989 |
|
SU1747767A1 |
| Захватное устройство | 1988 |
|
SU1613226A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Пневмогидравлические ножницы | 1987 |
|
SU1489924A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| УСТРОЙСТВО ДЛЯ ГИДРОДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ НА ПРИЗАБОЙНУЮ ЗОНУ ПЛАСТА (ВАРИАНТЫ) | 1995 |
|
RU2099516C1 |
| Захватное устройство для грузов с центральным отверстием | 1989 |
|
SU1661127A1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях захватных устройств роботов-манипуляторов. Целью изобретения является повышение надежности работы за счет увеличения степени разрежения в подпориневой полости. Кия этого внутри полого штока 5 расположен ползун 15, подпружиненный относительно полого корпуса 1 и взаимодействующий с поворотной относительно оси штока 5 втулкой 11. В корпусе 1 установлен поршень 2, в котором выполнен канал 6 с клапаном 7. Канал 6 соединяет подпоршневую и штоковую полости корпуса 1. Воздух из подпоршневой полости вытесняется через канал 6. При подъеме руки 22 манипулятора ползун 15 поднимается, освобождая втулку П, с которой взаимодействует клапан 7. При этом клапан 7 закрьшает канал 6. Далее осуществляется совместный подъем ползуна 15, штока 5 и поршня 2. В подпоршневой полости корпуса 1 создается разрежение, происходит зяхват детали. Отпускание детали происходит при повторном движении руки 22 манипулятора вниз. 1 з.п, ф-лы, 4 ил. I СЛ
Фиъ.2
18
/5
.З
| Вакуумный захват | 1978 |
|
SU800089A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
