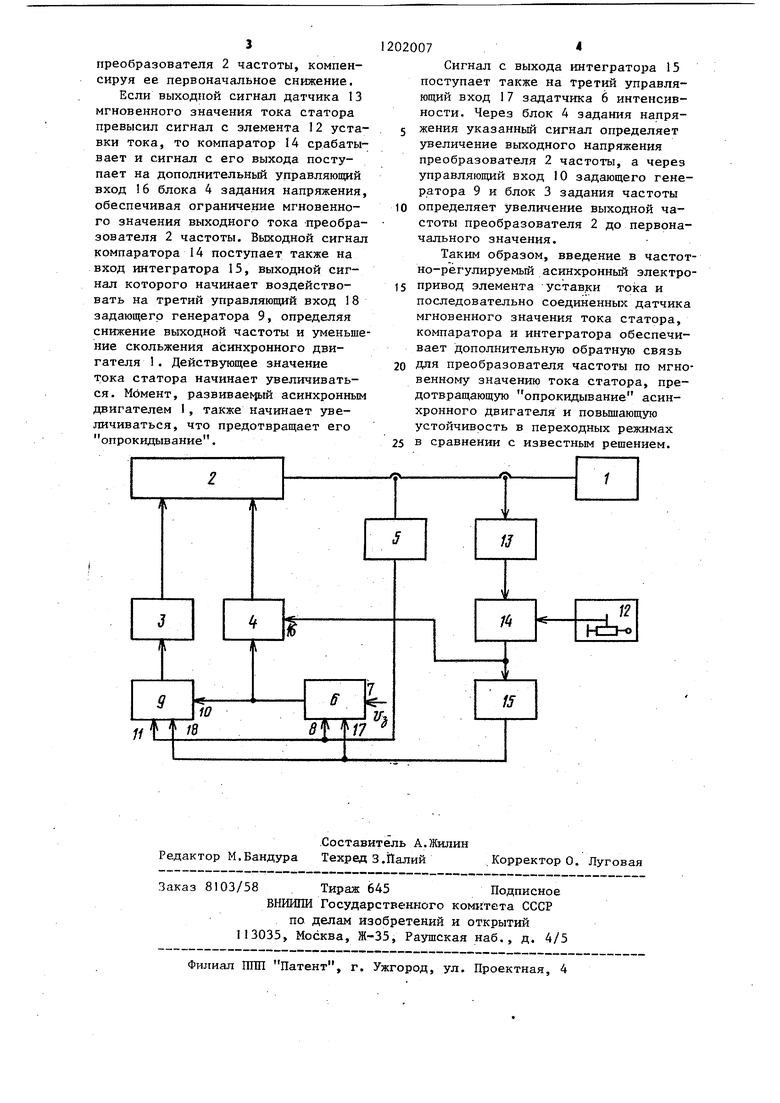
1 Изобретение относится к электротехнике, а именно к частотно-регули руемым электроприводам на основе асинхронных двигателей, и может быт использовано в системах и механизмах общепромьшшенного назначения Целью изобретения является повышение устойчивости в переходных режимах работы частотно-регулируемого электропривода на основе асинхро ного двигателя за счет предотвращения его опрокидывания. . На чертеже представлена функциональная схема частотно-регулируемого асинхронного электропривода. Устройство содержит синхронный двигатель 1, статорные обмотки которого подключены к выходам преобразователя 2 частоты, блок 3 задания частоты и блок 4 задания напряжения подключенные к одноименным управляющим входам преобразователя 2 частоты, датчик 5 действующего значения тока,статора, задатчик 6 интенсивности с первым и вторым управляющими входами 7, 8 и задающий генератор 9 с первым и вторым управляющими входами 10 II. Выход задатчика 6 интенсивности подключен к объединенным между еобой первому управляющему входу 10 задающего генератора 9 и входу блока 4 задания напряжения. Выход задающего генератора 9 подключен к входу блока 3 задания частоты, а выход датчика 5 действующего значения тока статора подключен к объединенньм между собой вторым управляющим входам 8 и 11 задатчика 6 интенсивное- ти и задающего генератора 9 соответ ственно . В частотно-регулируемый асинхрон ный электропривод введены элемент 12 уставки тока и последовательно соединенные датчик 13 мгновенного значения тока статора, компаратор 14 и интегратор 15. Блок 4 задания напряжения снабжен дополнительным управляющим входом 16, а задатчик 6 интенсивности и задающий генератор 9 снабжены тре тьими управляющими входами 17 и 18 соответственно, объединенными между собой и подключенными к выходу интегратора 15. Другой вход компаратора 14 подключен к выходу элемента 12 уставки тока, а его выход соединен с дополнительным управля072ющим входом 16 блока 4 задания напряжения. Частотно-регулируемый асинхронньш электропривод работает следующим образом. Сигнал задания Uj, поступающий на первый управляющий вход 7 задатчика 6 интенсивности, через задающий генератор 9 и блок 3 задания частоты определяет частоту выходного напряжения преобразователя.2 частоты, поступающего на статорные обмотки асинхронного двигателя 1. Этот же сигнал If-j через задатчик 6 интенсивности и блок 4 задания напряжения определяет величину выходного напряжения преобразователя 2 частоты. В установивщемся режиме работы выходной сигнал датчика 5 действующего значения тока статора, воздействуя в качестве сигнала обратной связи на управляющий вход 8 задатчика 6 интенсивности и управ- ляющий вход 11 задающего генератора, компенсирует управляющий сигнал по частоте. Сигнал с выхода интегратора 15 в указанном режиме равен нулю. При увеличении нагрузки на валу асинхронного двигателя 1 увеличивается потребление тока от преобразователя 2 частоты. Если при этом выходной сигнал датчика 13 мгновенного значения тока статора не превьшает сигнала с элемента 12 уставки тока, то компаратор 14 не срабатывает, а выходной сигнал интегратора 15 остается равньт нулю. Увеличение выходного сигнала с датчика 5 действующего значения тока статора по безынерционной отрицательной обратной связи через управляющий вход 8 задатчика 6 интенсивности, управляющий вход 11 задающего генератора 9 и блок 3 задания частоты приводит к уменьшению выходной частоты преобразователя 2 частоты. Одновременно увеличение указанного сигнала по инерционной положительной обратной связи через управляющий вход В задатчика 6 интенсивности и блок 4 задания напряжения приводит к увеличению выходного напряжения преобразователя частоты, а через управляющий вход 10 задающего генератора 9 и блок 3 задания частоты приводит к увеличению выходной частоты
преобразователя 2 частоты, компенсируя ее первоначальное снижение.
Если выходной сигнал датчика 13 мгновенного значения тока статора превысил сигнал с элемента 12 уставки тока, то компаратор 14 срабатывает и сигнал с его выхода поступает на дополнительньш управляющий вход 6 блока 4 задания напряжения, обеспечивая ограничение мгновенного значения выходного тока преобразователя 2 частоты. Выходной сигнал компаратора 14 поступает также на вход интегратора I5, выходной сигнал которого начинает воздействовать на третий управляющий вход 18 задающего генератора 9, определяя снижение выходной частоты и уменьшение скольжения асинхронного двигателя 1. Действующее значение тока статора начинает увеличиваться. Момент, развиваеь 1й асинхронным двигателем I, также начинает увеличиваться, что предотвращает его опрокидывание.
02007
Сигнал с выхода интегратора 15 поступает также на третий управляющий вход 17 задатчика 6 интенсивности. Через блок 4 задания напряжения указанный сигнал определяет увеличение выходного напряжения преобразователя 2 частоты, а через управляющий вход 10 задающего генератора 9 и блок 3 задания частоты
10 определяет увеличение выходной частоты преобразователя 2 до первоначального значения.
Таким образом, введение в частотно-регулируемый асинхронный электропривод элемента устав.ки тока и последовательно соединенных датчика мгновенного значения тока статора, компаратора и интегратора обеспечивает дополнительную обратную связь
20 для преобразователя частоты по мгновенному значению тока статора, предотвращающую опрокидывание асинхронного двигателя и повышающую устойчивость в переходных режимах
25 в сравнении с известным решением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1300622A1 |
| Способ торможения асинхронного электродвигателя | 1989 |
|
SU1656658A1 |
| Устройство для управления преобразователем частоты с непосредственной связью и широтно-импульсным регулированием | 1989 |
|
SU1624629A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| Непосредственный преобразователь частоты с широтно-импульсным регулированием выходного напряжения | 1983 |
|
SU1107249A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1220099A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU744886A1 |
| Электропривод с асинхронным коротко-замкнутым двигателем | 1971 |
|
SU508885A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
ЧАСТОТНО-РЕГУЛИРУЕМЬЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный двигатель, статорные обмотки которого подключены к выходам преобразователя частоты, блоки задания частоты и напряжения, подключенные к одноименным управляющим входам преобразователя частоты, датчик действующего значения тока статора, задатчик интенсивности с-первым и вторым управляющими входами и задающий генератор с первым и вторым управляющими входами, при этом выход задатчика интенсивности подключен к объединенным между собой первому управляющему входу задающего генератора и входу блока задания напряжения, выход задающего генератора подключен к входу блока задания частот, а выход датчика действующего значения тока статора к объединенным между собой вторым управляющим входам задатч1жа интенсивности и задающего генератора, отличающийся тем, что, с целью повьшения устойчивости в переходных режимах, в него введены элеi мент уставки тока и последовательно соединенные датчик мгновенного значе(Я ния тока статора, компаратор и инс тегратор, причем блок задания напряжения снабжен дополнительным управляющим входом, а задатчик интенсивности и задающий генератор третьими управляющими входами, объединенными между собой и подключенными к-выходу интегратора, при этом другой вход компаратора подключен к выходу элемента уставки тока, а его выход соединен с дополнительным управляющим входом блока задания напряжения .
| Сандлер А.С., Сарбатов Р.С | |||
| Автоматическое частотное управление асинхронными двигателями | |||
| М.: Энергия, 1974, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| ЧАСТОТНО РЕГУЛИРУЕМЫЙ ПРИВОД | 0 |
|
SU409347A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
