1
Изобретение относится к электроприводам переменного тока с частотным управлением и может использоваться для регулирования скорости и момента на валу асинхронного двигателя.
Известен электропривод, в котором сравнение тока статора с эталонным значением производится по его мтновенНьгм значениям.
Цель изобретения - упрощение и расширение диапазона регулирования скорости двигателя.
Это достигается тем, что в известный электропривод с асинхронным короткозамкнутым двигателем, содержащий блокинтеграторовтоков статора, подсоединенный через блок сравнения к системе управления преобразователем частоты, задающий генератор частоты токов статора, выход которого подсоединен к системе управления, задатчик момента, связанный с задающим генератором, введены, устройство обнуления интеграторов и функциональный преобразователь, при этом функциональный преобразователь подсоединен своими входами к задающему генератору и задатчику момента, а выходом - к блоку сравнения, выход системы управления через устройство обнуления интеграторов подсоединен к блоку интеграторов токов статора.
Такое соединение обеспечивает работу привода, при которой сравнение тока статора с
эталонным значением производится по его интегральному значению за каждый полупериод основной частоты.
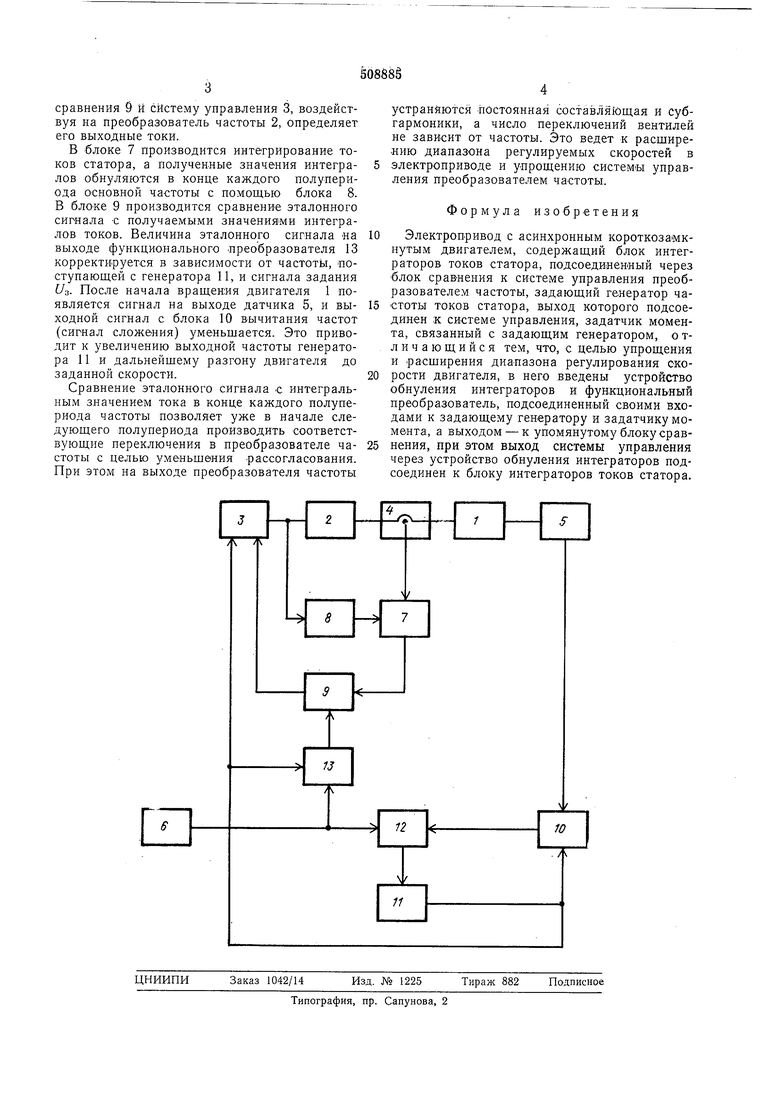
На чертеже представлена структурная схема предлагаемого электропривода.
Схема содержит асинхронный короткозамкнутый двигатель 1, преобразователь частоты 2 с системой управления 3, блок датчиков токов статора 4, импульсный датчик скорости
5, задатчик момента 6. В контуре регулирования напряжения имеются блок 7 интеграторов токов статора с блоком обнуления 8, блок 9 сравнения по току. В контуре регулирования частоты имеются блок 10 вычитания частот,
задающий генератор частоты 11, блок 12 сравнения по частоте.
Оба контура регулирования связаны между собой с помощью функционального преобразователя 13, введение которого в электропривод определяется необходимостью изменения уставки тока в зависимости от скорости вращения двигателя.
Электропривод работает следующим образом.
Сигнал задания Ь:, с выхода задатчика 6 определяет выходную частоту задающего генератора 11, которая через систему управления 3 поступает на преобразователь частоты 2. Одновременно спгнал задания (/з через
функциональный преобразователь 13, блок сравнения 9 и систему управления 3, воздействуя на преобразователь частоты 2, определяет его выходные токи. В блоке 7 производится интегрирование токов статора, а полученные значения интегралов обнуляются в конце каждого полупериода основной частоты с помощью блока 8. В блоке 9 производится сравнение эталонного сигнала -с получаемыми значениями интегралов токов. Величина эталонного сигнала «а выходе функционального преобразователя 13 корректируется в зависимости от частоты, -поступающей с генератора 11, и сигнала задания f/3. После начала вращения двигателя 1 появляется сигнал на выходе датчика 5, и выходной сигнал с блока 10 вычитания частот (сигнал сложения) уменьшается. Это приводит к увеличению выходной частоты генератора 11 и дальнейшему разгону двигателя до заданной скорости. Сравнение эталонного сигнала с интегральным значением тока в конце каждого полупериода частоты позволяет уже в начале следующего полупериода производить соответствующие переключения в преобразователе частоты с целью уменьшения рассогласования. При этом на выходе преобразователя частоты устраняются постоянная составляющая и субгармоники, а число переключений вентилей не зависит от частоты. Это ведет к расщиреиию диапазона регулируемых скоростей в электроприводе и упрощению системы управления преобразователем частоты. Формула изобретения Электропривод с асинхронным короткозамкнутым двигателем, содержащий блок интеграторов токов статора, подсоединендый через блок сравнения к системе управления преобразователем частоты, задающий генератор частоты токов статора, выход которого подсоединен к системе управления, задатчик момента, связанный с задающим генератором, о тличающийся тем, что, с целью упрощения и расщирения диапазона регулирования скорости двигателя, в него введены устройство обнуления интеграторов и функциональный преобразователь, подсоединенный своими входами к задающему генератору и задатчику момента, а выходом - к упомянутому блоку сравнения, при этом выход системы управления через устройство обнуления интеграторов подсоединен к блоку интеграторов токов статора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Устройство для управления асинхронным короткозамкнутым двигателем | 1980 |
|
SU900397A1 |
| Электропривод переменного тока | 1987 |
|
SU1534735A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2163414C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
12
Ю
