Изобретение относится к машиностроению, в частности к манипуляторам для механизации и автоматизации основных и вспомогательных онерации.
Це;|ь изобретения - расширение техно- логических возможностей исполнительного устройства манинулятора путем рас1иирения зоны обслуживания.
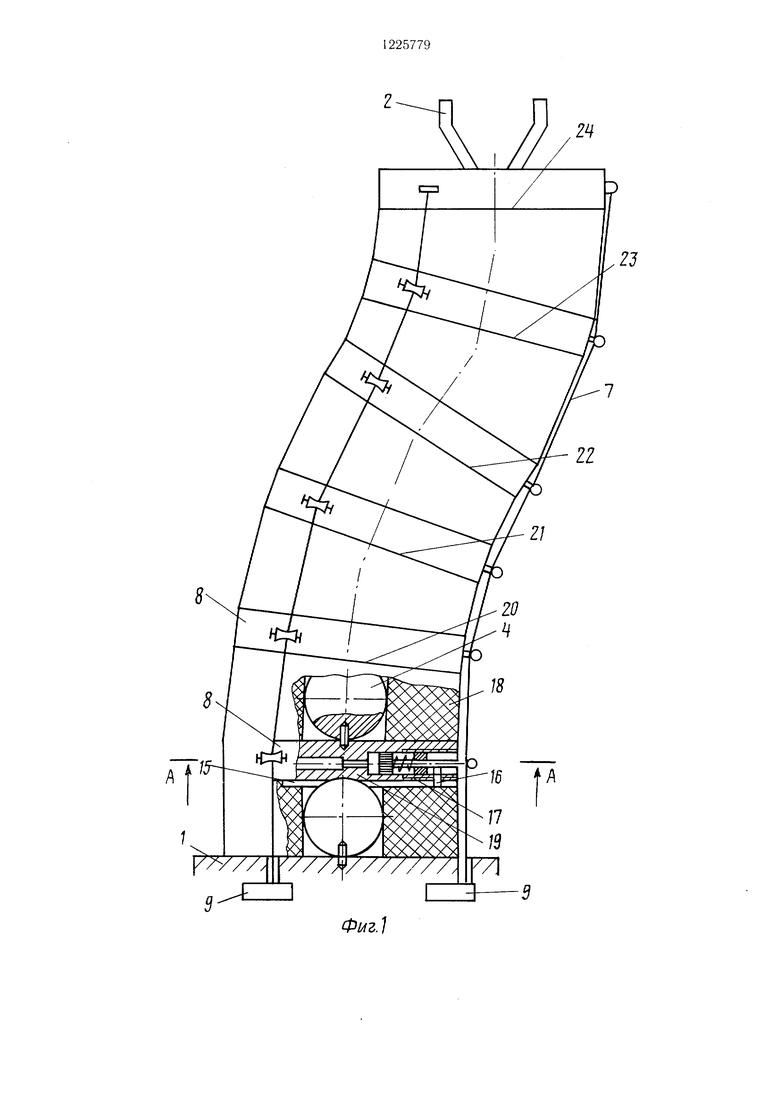
На фиг. 1 изображено исполнительное устройство манипулятора, обш.ий вид; на фиг. 2 -.сечение Л - А на фиг. 1; на фиг. 3 -- модуль, соединенный с основанием.
Испо. 1ните;п ное устройство манипулятора содержит основание 1, захват 2 и модули. Каждый модуль вынолнен в виде опорного фланца 3, имеюнхего форму диска, торцо- вые поверхности которого параллельны между собой. Сферические элементы 4 жестко связан1з с опорным фланцем 3 пре- дыдуи1.е1 о .модуля или с основанием 1. Опорные фланцы 3 имеют радиальные цилиндрические нроточки 5 и 6, число которых со- ответствует числу гибких тяг 7, а по окружности их наружной поверхности предусмотрены направляющие элементы 8 для гибких тяг 7, каждая из которых имеет индивидуальный двигатель 9. При этом двигатели
9установлены на основании 1. Количество гибких ТЯ1 7 должно быть не менее трех. Радиа.,) цилиндрическую проточку 5 используют для подвода рабочей среды, например воздуха или масла, от источника рабочей среды (не показан). В каждой радиальной цилиндрической проточке 6 раз- мен1еп плунжер 10 тормозного устройства, пружи1 а 11 и резьбова пробка 12 с отверстием 13. На 1нтоке 14 каждого плунжера
10выполнен наконечник для фиксации гибкой тяги 7. Тормозные колодки 15 жест- ко связаны со пггока.ми 14 плунжеров 10 с помощью рычагов 16 и их рабочие поверхности выполнены по сфере, радиус которой соответствует радиусу сферического элемепта, и расположены в радиальных нанравляюнгих пазах 17, выполненных на од- пой торцовой поверхности опорного фланца
3. При этом последние юдпружинены друг относительно дру1 а с помощью упругих элементов 18. Иснол}П1телыюе устройство манипулятора имеет возможность поворачиваться в любом направлении относительно точек 19-24, т.е. относительно точек контакта
0
0
Q
0
5
сферического элемента 4 с торцовы.мн поверхностями опорного фланца 3 колодки 15.
В исходно.м положении исполнительное устройство выпрямлено. При этом тор.мозные колодки 15 нод действием пружин И прижаты к сферическиг/ элементам 4, а между наконечниками штоков 14 каждого илу):- жера 10 и гибкими тягами 7 имеется зазор.
Исполнительное устройство манилулято- ра работает следую1ии.м образом.
Например, необходимо повернуть исполнительное устройство относительно точки 20. Для этого в радиалы ую цилиндрическую проточку 5 подается рабочая среда и плунжеры 10 перемещаются от центра, отодвигая при этом тор.мозные колодки 15 от сферического элемента. При дaльпcйнJeм перемещении плунже)ов 10 их паконечники, выполненные па ujTOKax 14, прижимают гибкие тяги 7 к направ.пяющим элемента.. 8. Включаются двигатели 9 гибких тяг 7, причем скорости перемещения последних .и направление их движения неодинаковы. В зависимости от Bbi6)aniioro напра1 ления. поворота исполнительного устройства -шеть двигателей 9 натягивает гибкие тяги 7, а другая часть отпускает гибкие тяги 7. При этом часть упругих элементов 18 сжи.чает- ся, а другая часть - растягивается.
Двигатели 9 могут получить сигпа;1Ы о скорости движения и направ,:1ения tieoevie- шения от системы програм.много управ, 1ения. С программным унравлением быть связаны и нлунжеры 10. При достижении необходимого поворота испо.;и1ительног о устройства относительно точки 20 давление рабочей среды из радиальной цилиндрической проточки 5 снимается и плунжеры 10 нод действием пружины 11 перемен1аются к центру. При этом тормозные колодки 15 также перемещаются к центру и таким образом фиксируют положение непочтительного устройства руки. Для поворота исполнительного устройства относительно д у1 их точек 19-24 поступают аналогично. При этом рабочую часть подводят в радиальную цилиндрическую проточку 5 соответствуюп1е- го опорного флап1.|.а 3. После выполнення заданнь:х перемеп1ений вык;1ючаются двигатели 9 и исполнительное устройство под действием эле.ментов 18 занимает :.с- ходное положение.
; / . / / « / - - / / //- -- У
. . / / : / . / / / . /. -ч4 -
: 5у .- у / / / / / / ., :
.-i:..;™ ---;--.i;iA.t..j р.ЬАХ.:™х,
/ у/ / / . ///VV/ л ,л -7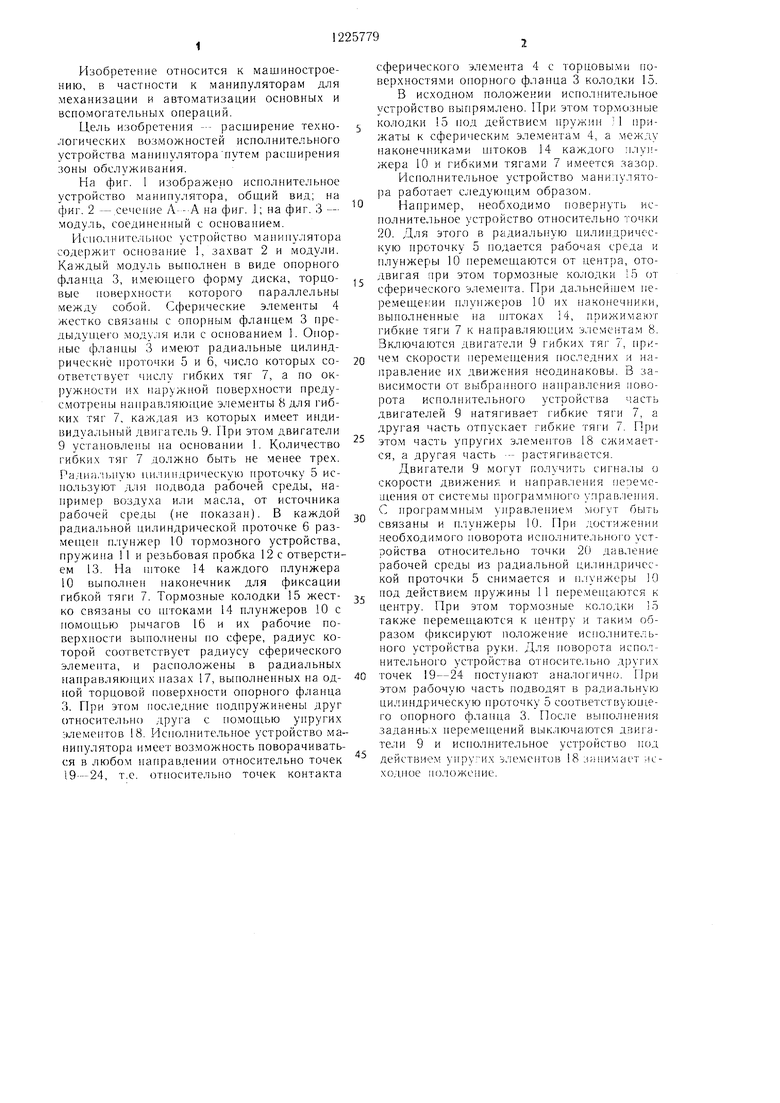
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство промышленного робота | 1984 |
|
SU1202852A1 |
| Самосвальный полуприцеп седельного типа | 1960 |
|
SU133357A1 |
| СПОСОБ ГЛУБОКОЙ СВЕРЛЯЩЕЙ ПЕРФОРАЦИИ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2298644C1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Устройство для отвода тормозных колодок | 1987 |
|
SU1463600A1 |
| Манипулятор | 1988 |
|
SU1537510A1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2010 |
|
RU2419911C1 |
| Дисковый тормоз для транспортного средства | 1977 |
|
SU906355A3 |
| Веломобиль | 1989 |
|
SU1702869A3 |
(ичу aiii е,;. и. Ьакули; ;:
Po. М. i :.:ii;il i - ;H.l И, НЧНЧ-K(lO;10i -:-(i|l . С;:-.Р
: iiK;i ч I lTiJ 1 И-; /л I Ч.т iliD.UMiriidi
ВНИИНН Г; суд;|рет1н-ннаго комилета ССХ Р
liu „e.uiv. ()бретен:.Й н открытий
ii;i0.45, Л оскзг1 Ж 35, Рау1 ;ская каб., д. 4-5
Филиал I ilin «11ат.... г, Ужгород, ул. Проектная. 4
| Рука манипулятора | 1981 |
|
SU1007959A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
