Известен способ многокоординатного программного управления электроприводом станка с шаговым двигателем, преобразующим импульсы программы в угловое перемещение исполнительного механизма.
Недостатком известного способа является осуществление управления шаговым двигателем по программе, передаваемой с нескольких дорожек программоносителя по отдельным каналам к различным фазовым обмоткам двигателя. Это требует создания программоносителя увеличенного объема. Отсутствие контроля реверса и введения коррекции на радиус инструмента при осуществлении известного способа снижает надежность работы системы и точность обработки.
Отличительная особенность описываемого способа состоит в том, что, с целью уменьшения объема программоносителя, применяют устройство, обеспечивающее путем записи на программоносителе одной дорожки одноканальное управление шаговым двигателем, выполненное по триггерной схеме распределения импульсов по фазам. Для увеличения надежности работы системы путем контроля реверса применяют датчик перемещения, выдающий при прямом вращении два поочередно-чередующихся сигнала, а при реверсе два сигнала подряд. С целью введения коррекции на радиус инструмента, на отдельной дорожке записывают информацию, учитывающую его теоретический радиус с помощью электронного делителя.
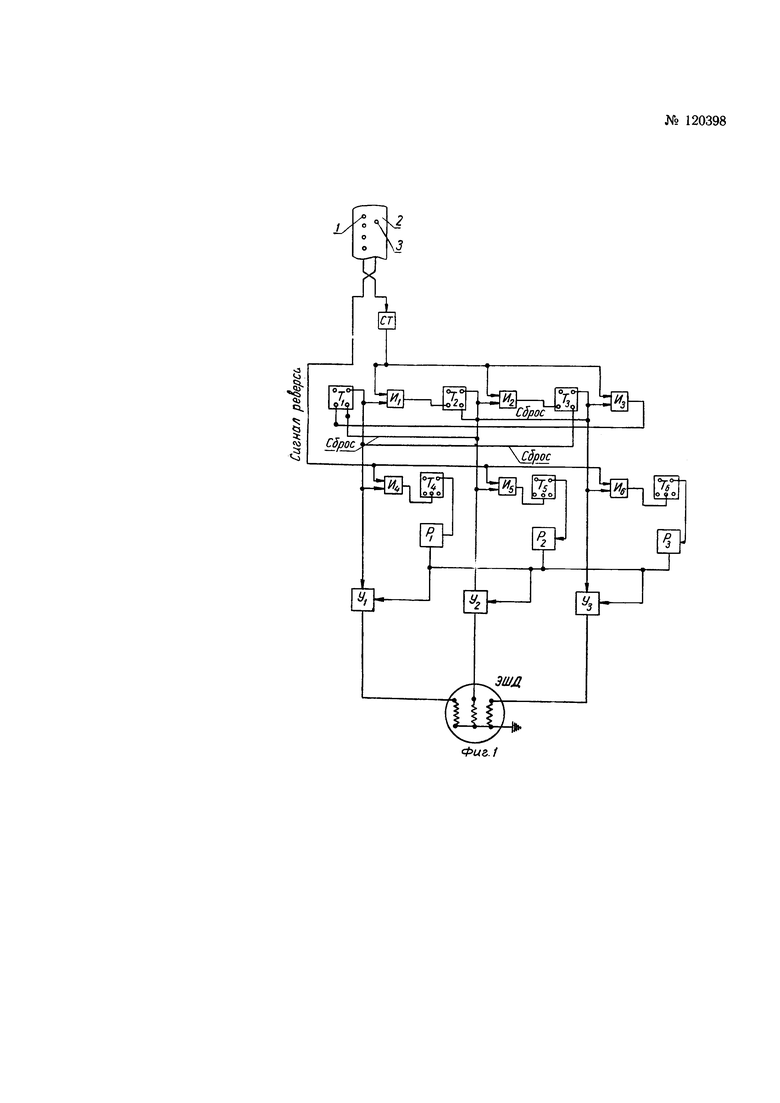
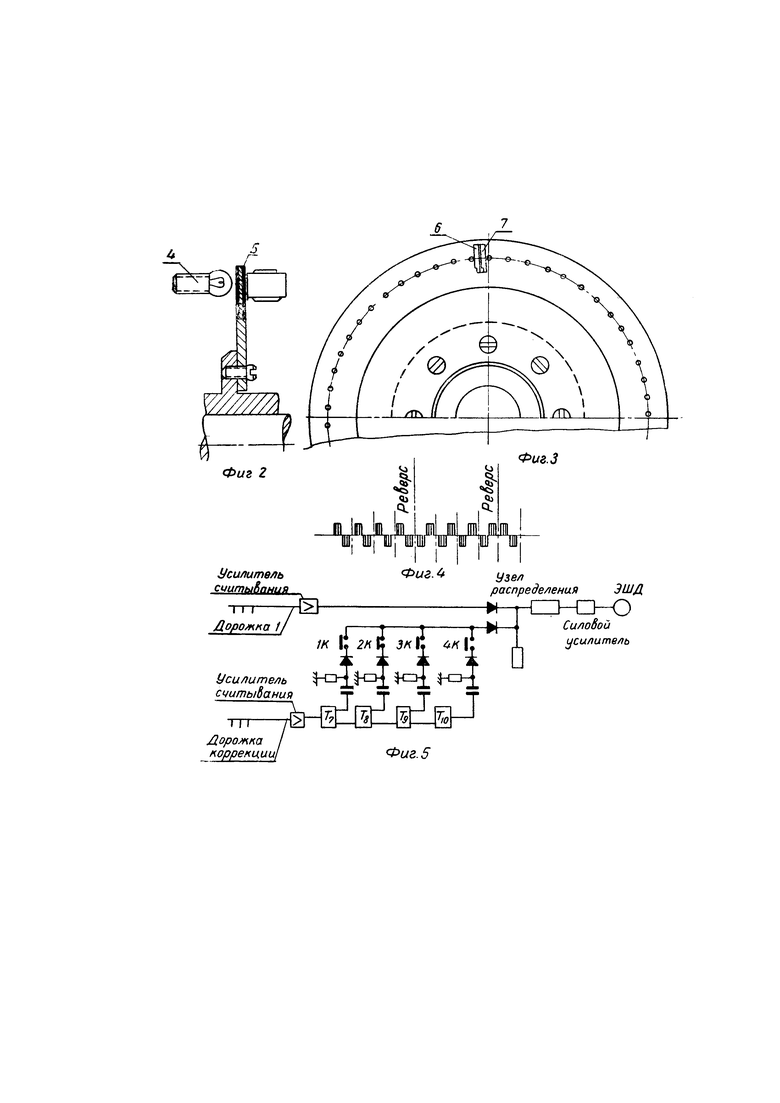
На фиг. 1 изображена структурная схема узла распределения системы программного управления одним шаговым двигателем фрезерного станка по способу согласно изобретению; на фиг. 2, 3 - вид датчика перемещения сбоку и со стороны фотоэлектрических преобразователей; на фиг. 4 - график сигналов от фотоэлектрических преобразователей датчика перемещений; на фиг. 5 - структурная схема системы управления с коррекцией на радиус фрезы.
В системе программного управления может быть применено несколько шаговых двигателей. Каждый шаговый двигатель управляется импульсами от одной дорожки 1 на программной ленте 2. Дорожка 3 служит для записи сигналов реверса, которые поступают к различным двигателям через узел кода (не показанный на фиг. 1). С программой ленты через считывающую головку СТ усиленные сигналы поступают на вход формирователей импульсов И1, И2, И3.
Если триггер Т1 взведен, то триггеры Т2 и Т3 сброшены и сигнал через И1 проходит к триггеру Т2, от которого он поступает в электронный усилитель У1 и затем к соответствующей фазной обмотке шагового двигателя ЭШД.
При переброске триггера Т2 он отпирает усилитель У2 и сбрасывает триггер Т1. Одна фаза отключается, а другая - включается. Следующий сигнал взводит триггер Т3 и сбрасывает триггер Т2. Вторая фаза отключается, а третья - включается через усилитель У3. Реверсирование двигателя выполняется изменением последовательности включения фазных обмоток двигателя, за счет переключения тех двух фазных обмоток, через которые не проходит ток. Этим предотвращается пропуск поворота ротора двигателя на один шаг. Сигнал реверса подается на вход формирователей импульсов И4, И5, И6 и затем проходит только на один из триггеров T4, Т5, Т6, который соответствует включенной в данный момент фазной обмотке. При этом срабатывает соответственно одно из реле Р1, Р2, Р3, переключающее две другие обмотки.
Датчик перемещения состоит из осветителя 4, диска 5, сидящего на валу, связанном с ротором шагового двигателя, и двух фотоэлектрических преобразователей 6 и 7. Диск снабжен равномерно расположенными отверстиями, через которые луч света от осветителя попадает на фотоэлектрические преобразователи, выдающие два поочередно чередующихся сигнала разных знаков при прямом вращении, при реверсе два сигнала подряд одного знака (фиг. 4). Поступление подряд двух импульсов от одного фотопреобразователя служит сигналом для контроля реверса.
Для внесения в работу шагового двигателя коррекции на радиус инструмента на программную ленту записывают информацию, учитывающую теоретический радиус инструмента с помощью электронного делителя. Включение коррекции осуществляется тумблерами 1к, 2к, 3к (фиг. 5). В зависимости от числа включенных тумблеров к основному унитарному коду, записанному на управляющей вращением двигателя дорожке 1, добавляются сигналы, записанные на дорожке коррекции, через усилитель считывания и триггеры Т7, T8, Т9, Т10, проходящие к узлу распределения, к силовому усилителю и затем в шаговый двигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРОИСКРОВОЙ УСТАНОВКОЙ | 1966 |
|
SU187502A1 |
| Устройство для программного управления | 1982 |
|
SU1095137A1 |
| Шаговая система программного управления многокоординатным манипулятором | 1977 |
|
SU644617A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| Устройство для программного управления приводом | 1978 |
|
SU702350A1 |
| Устройство для программного управления процессом крашения материала | 1980 |
|
SU943645A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU1015339A1 |
1. Способ многокоординатного программного управления электроприводом станка с шаговым двигателем, преобразующим импульсы программы в угловое перемещение исполнительного механизма, отличающийся тем, что, с целью уменьшения объема программоносителя, применяют устройство, обеспечивающее путем записи на программоносителе одной дорожки одноканальное управление шаговым двигателем, выполненное по триггерной схеме распределения импульсов по фазам.
2. Прием выполнения способа по п. 1, отличающийся тем, что, с целью увеличения надежности работы системы путем контроля реверса, применяют датчик перемещения, выдающий при прямом вращении два поочередно чередующихся сигнала, а при реверсе два сигнала подряд.
3. Прием выполнения способа по п. 1, отличающийся тем, что, с целью введения коррекции на радиус инструмента, на отдельной дорожке записывают информацию, учитывающую его теоретический радиус с помощью электронного делителя.
