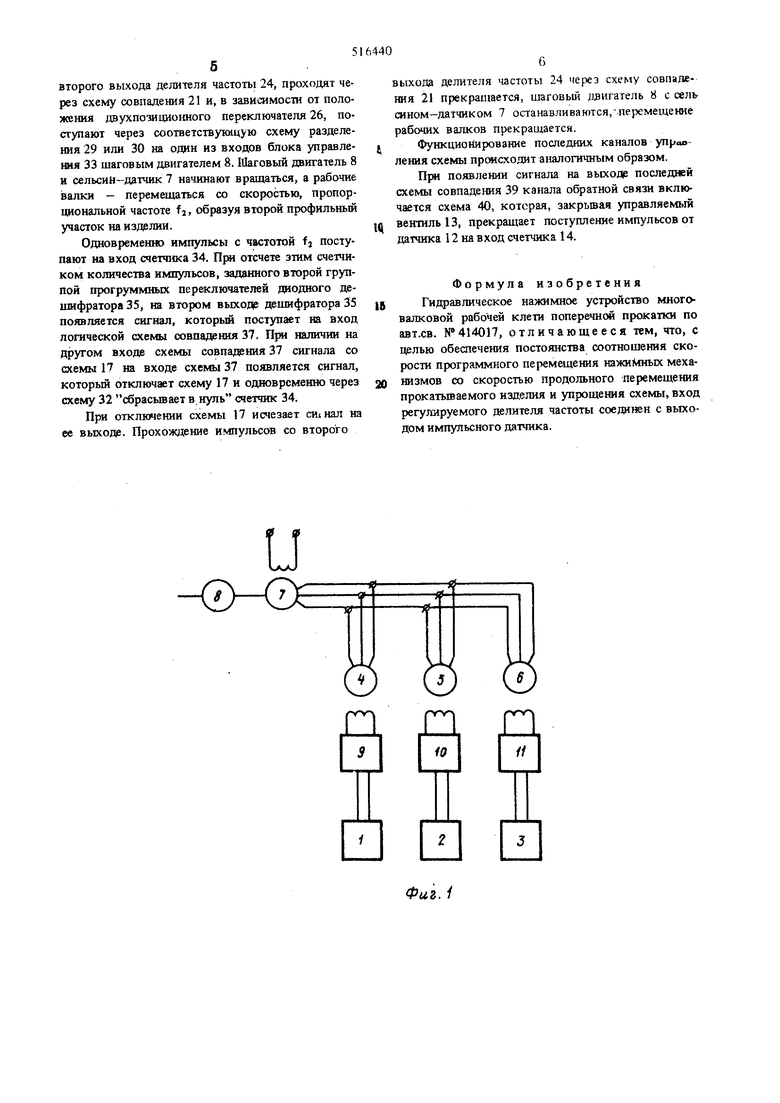
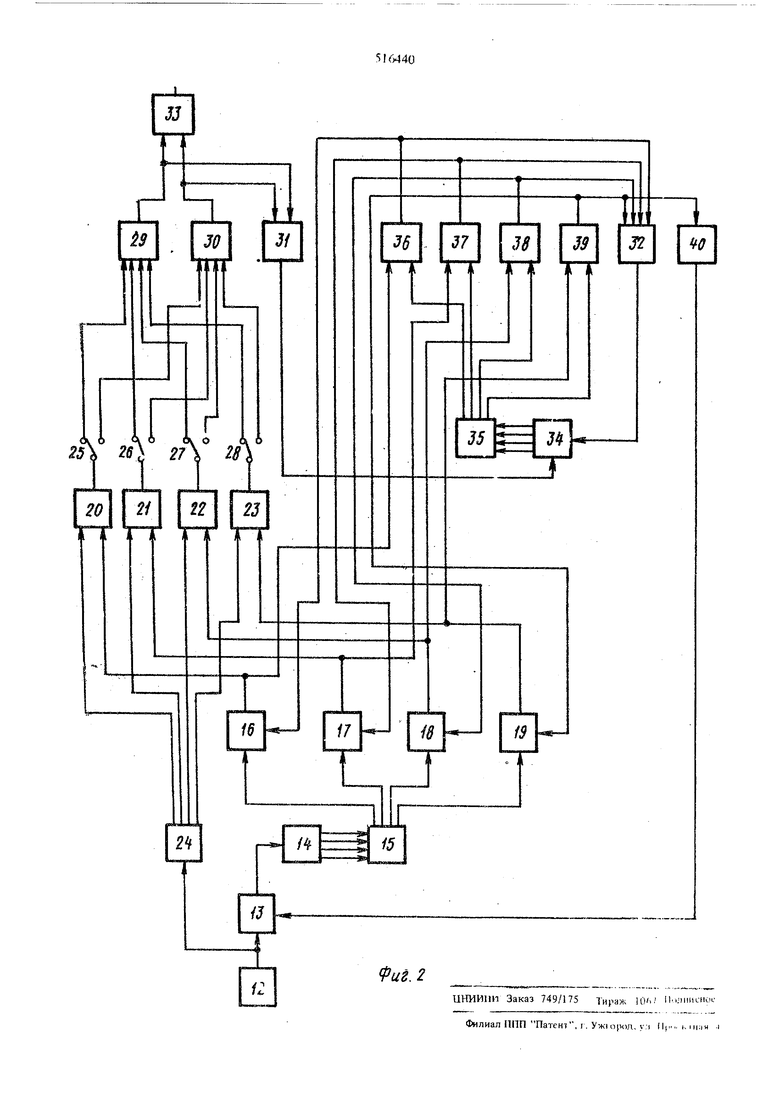
Целью изобретения является обеспечение постоянства соотнои|ен(1я скорости программного перемещения нажимных механизмов со скоростью продольного перемещения прокатьшаемого изделия. Поставленная цель достигается тем, что вход регулируемого делителя частоты соединен с выхочом импульсного датчика. На фиг. 1 изображена электрическая схема устрсж ва; на фиг. 2 -блснс-схема программного устршства Устройство состоит из поршневых гидравтческих цилиндров с подвижными корпусами, на которых закреплены рабочие валки электрогидравлических преобразователей 1, 2, 3, управляющих поршневыми гидравлическими цилиндрами датчиков положения - сельсинов-приемников 4, 5, б, общего задатчика, включающего сельсин-датчик 7 и шаговый двигатель 8, подключенный к программному устройству, а также фазочувствительиых усилителей 9,10,11. Программное устройство содержит импульсный датчик 12, подключенный через управляемьш вентиль 13 на вход счетчика импульсов 14, снабженного диодным дешифратором 15с пр«-граммнымк переключателями, - логические схемы память 16-19, группу логических схем совпадения 20-23, регулируемый делитель частоты 24, подключенный на выход датчика 12, двухпозиционные переключатели 25-28, логические схемы разделения 29-32, блок управле1«я 33 шаговым двигателем 8, счетчик И11шульсов 34, снабженный диодным дещифратором 35 с программными переключателями, группу логических схем совпадения 36-39, логическую схему память 40. Элементы 12-30 программного устройства представляют собой канал прямой связи. Элементы 31,32, 34-40 образуют канал обратной связи. Количество логических cxt.vi память, логических схем совпадения, а также двухпожционных переключателей зависит от количества профильных переходов на прокатьтаемом изделии и пришдапиально может быть любым. устройства происходит следующим образом. Импульсы (их частота пропорциональна скорости осевой подачи стана) с датчика 12 через открытьш вентиль 13 поступают на вход счетчика 14. При отсчете количества импульсов, заданного первой группой программных переключателей (программные переключатели входят в соспв диодного дешифратора 15) и определяющего начало первого профильного перехода на изделии, появляется кратковременный сигнал на первом выходе дешифратора 15, который заноминается логической схемой 16 и поступает на один из входов схемы совпадения 20. При этом импульсы с млатюй частотой где f - частот импульсов на т.гхо.тс .иьсного .ча 1 2. «1 - делитель (целое число 1, 2, 3.), заданный для первого выхода делителя частоты 24, проходят через схему совпадения 20 н, в зависимости от положения двухпозиционного переклютателя 25, определяющего направление вращения шагового двигателя 8, а в конечном итоге - направление перемещения рабочих валков к ос шга от оси прокатки, поступают через соответствующую схему разделения 29 и 30 на один из входов блока управления 33 шаговым двигателем 8. Частота импульсов fj определяет скорость вращения шагового двигателя 8, а в конечном итоге скорость перемещения рабочих валков, т.е. наклон первого профильного участка на изделии. Врапдение шагового двигателя S передается сель сину-датчику 7. В результате рассогласования углов поворота якорей сельсиш-датчика 7 и сельсинов-приемников 4, 5, 6 возникает ток рассогласования, который выпрямляется и усиливается в фазочувствительных усилителях и подается на катушки электромагнитов электрогидравлических преобразователей, 2, 3. Последние преобразуют этот ток в пропорциональный по мощности поток рабочей жидкости, которая поступает в гидроцилиндры. Подвижные корпуса гидроцилиндров и связанные с ними рабочие валки перемещаются к оси или от нее до тех пор, пока они через кинематические передачи не приведут в согласованное положение якори сельсинов-приемников 4, 5, 6 и якори сельсина-датчика 7. Одноврменно импульсы с частотой fj с выхода схемы разделения 29 или 30 через треуью схему разделения 31 поступают на вход счетчика 34. При отсчете этим счетчиком, определяющим величину перемещения рабочих валков, количества импульсов, заданного первой группой программных переключателей (программные переключатели входят в состав ДИОДНОГОдешифратора 35), появляется сигнал на первом выходе дешифратора 35, который поступает на вход схемы совпадения 36. При наличии на другом входе схемы 36 сигнала со схемы 16 на выходе схемы 36 появляется С гнал, который отключает схему 16 и одновременно через схему разделения 32 сбрасьшает в нуль счетчик 34. При отключении схемы 16 исчезает сигнал на ее выходе. Прохождение импульсов с первого выхода делителя часготы 24 через схему совпадения 20 прекращается, шаговый двигатель 8 и сельсин-датчик 7 останавлипаюгся, иеремещего1е рабочих валков прекращается. При отсчете счетчиком 14 количетсва импульсов, заданного второй группой программных переключателей и определяющего начало второго профильного перехода на издегши. появляется сигнал на uropOM выходе дспшфрагорл 15, который запоминается 17 и иостугмет на один из выходоп cxcNn i счпиадсния 21. При :)1ом 11М1:у1).см с чясгог(1Й f,- .; - , где О; -делн1с.|) (и.елос лч.ю - 1,.,:...;. .миачим яая второго выхода делителя частоты 24, проходят через схему совпадения 21 и, в зависимости от положения двухпоицио1шого переключателя 26, поступают через соответствующую схему разделения 29 или 30 на один из входов блока управления 33 шаговым двигателем 8. Шговый двигатель 8 и сельсин-датчик 7 начинают вращаться, а рабочие 1валки - перемещаться со скоростью, пропорциональной частоте fj, образуя второй профильный участок на изделии. Одновременно импульсы с частотой f j поступают на вход счетчика 34. При отсчете этим счетчиком количества импульсов, заданного второй группой прогруммных переключателей диодного дешифратора 35, на втором выходе деишфратора 35 появляется сигнал, который поступает на вход логической схемы совпадения 37. При наличии на другом входе схемы совпадения 37 сигнала со схемы 17 на входе схемы 37 появляется сигнал, который отключает схему 17 и одновременно через схему 32 сбрасывает в нуль счетчик 34. При отключении схемы 17 исчезает сшнал на ее выходе. Прохождение импульсов со второго ыхода делителя частоты 24 через схему совпадения 21 прекращается, шаговый даигатель 8 с сель сином-датчиком 7 останавливаются,перемещение рабочих валков прекращается. Функционирование последних каналов управления схемы происходит аналогичным образом. Пря появлении сигнала на выходе последней схемы совпадения 39 канала обратной связи включается схема 40, которая, закрьтая управляемый вентиль 13, прекращает поступление импульсов от датчика 12 на вход счетчика 14. Формула изобретения Гидравлическое нажимное устройство многовалковой рабочей клети поперечной прокатки по авт.св. N 414017, отличающееся тем, что, с целью обеспечения постоянства соотношения скорости программного перемещения нажиМных механизмов со скоростью продольного перемещения прокатьшаемого изделия и упрощения схемы, вход регулируемого делителя частоты соедингн с выходом импульсного датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическое нажимное устройство многовалковой рабочей клети поперечной прокатки | 1975 |
|
SU558742A2 |
| ГИДРАВЛИЧЕСКОЕ НАЖИМНОЕ УСТРОЙСТВО МНОГОВАЛКОВОЙ РАБОЧЕЙ КЛЕТИ ПОПЕРЕЧНОЙПРОКАТКИ | 1972 |
|
SU414017A1 |
| Устройство для управления положением гидравлических нажимных механизмов | 1980 |
|
SU882673A1 |
| Устройство для определения положения заготовок на поде кольцевой нагревательной печи | 1984 |
|
SU1217902A1 |
| Устройство для программного управления | 1978 |
|
SU744464A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДАЧЕЙ ШЛИФОВАЛЬНОГО | 1973 |
|
SU363966A1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖУЩИМИ МЕХАНИЗМАМИ ПРОКАТНОГО СТАНА | 1966 |
|
SU189382A1 |
| Автомат для шлифования винтовых канавок | 1985 |
|
SU1713778A1 |
| Устройство автоматического управления приводами механизмов стана холодной прокатки труб | 1984 |
|
SU1210930A1 |
| Устройство для навивки пружин | 1974 |
|
SU506459A1 |
0
п
п
//
10
v6 o Xo Л
25 2S 27 28
21
n
23
20
j I. I
17
16
2
/
, n/ 1 IIII,ill
35
J4 Т
19
W
