1
Изобретение относится к железнодорожному транспорту, а именно к расцепньм устройствам вагонов, оборудованных автосцепкой.
Целью изобретения является упрощение конструкции и повышение надежности.
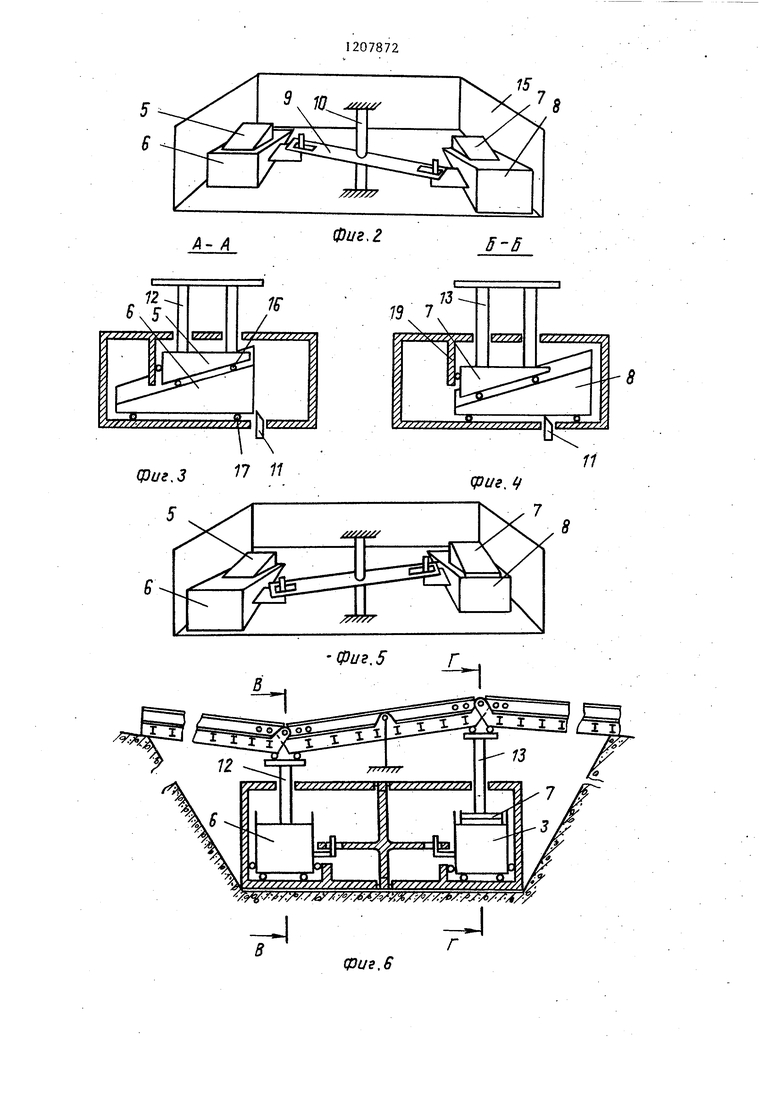
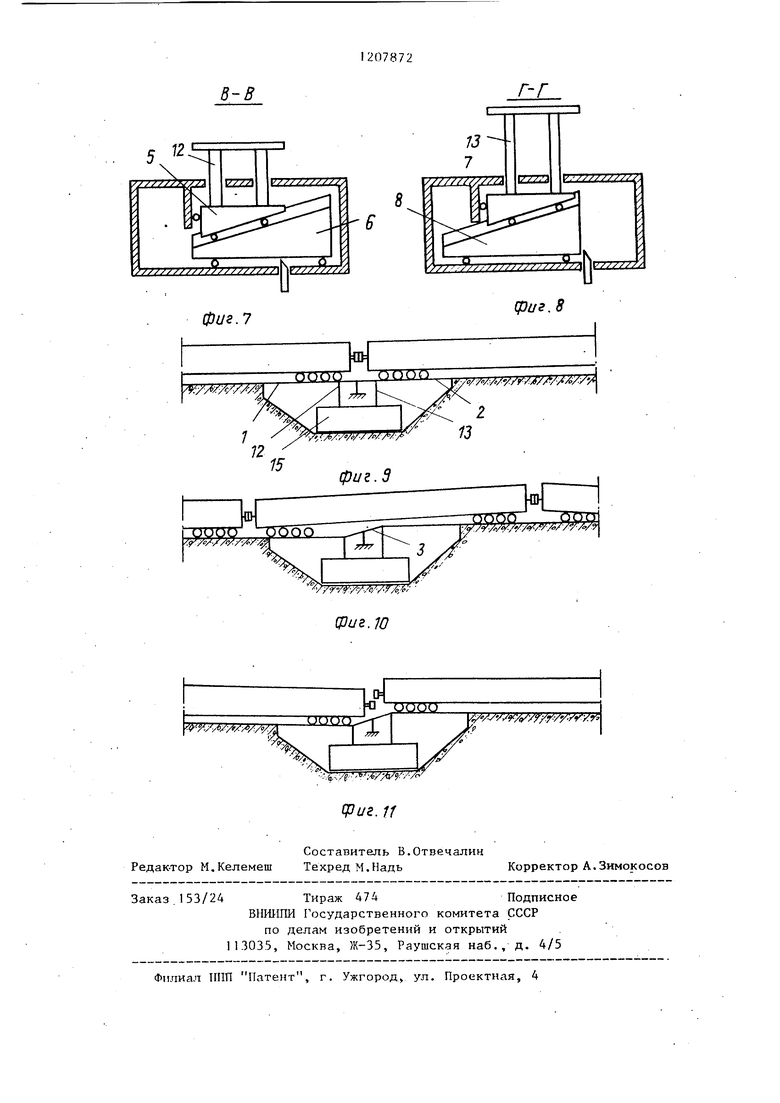
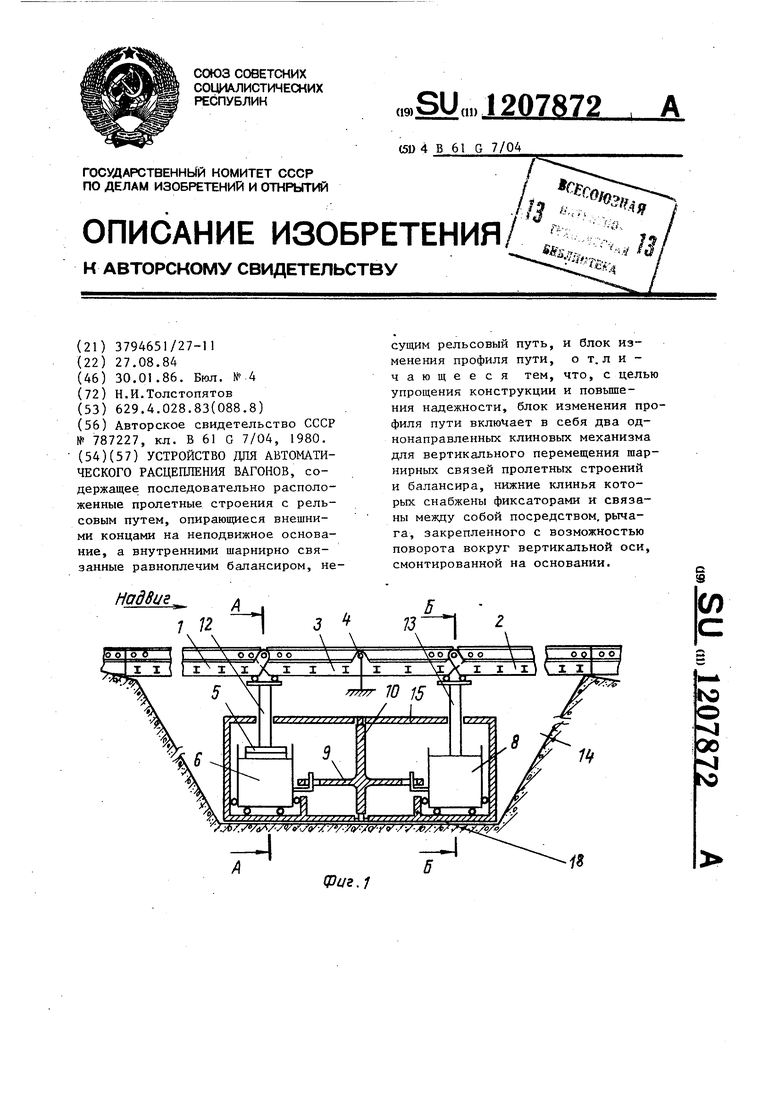
На фиг. 1 показана схема положения пролетных строений, балансира и привода при пропуске вагонов без расцепления, На фиг. 2 - привод балансира при положении уст-- ройства в момент пропуска вагонов без расцепления; на фиг. 3 - разрез А-А на фиг. 1| на фиг. 4 - разрез Б-Б на фиг. 1 , на фиг. 5 - привод балансира в положении устройства при расцеплении вагонов; на фиг. 6 - положение пролетных строений, балансира и привода при расцеплении вагонов; на фиг. 7 разрез В-В на фиг. 6; на фиг. 8 - разрез Г-Г на фиг. 6 на фиг. 9 - схема профиля пути с вагонами в положении устройства пропуска вагонов без расцепления; на фиг.10 - то же, в момент срабатывания привода балансира , на фиг .11- положение полного расцепления вагонов.
Устройство для автоматического расцепления вагонов содержит переднее 1 (по ходу надвига вагонов) пролетное строение с участком рельсового пути и заднее 2 пролетное строение с участком рельсового пути, устройство изменения профиля пути в виде равноплечего балансира 3 с участком рельсового пути и горизонтальной осью 4 вращения, шарнирно установленного между пролетными строениями I и 2, и привода балансира, состоящего из двух пар односторонних скошенных клиньев, верхнего клина 5 и нижнего клина 6, уложенных один на друг скошенными поверхностями, и второй пары аналогичных клиньев - верхнего 7 и нижнего 8. Нижние клинья 6 и 8 соединены между собой равноплечим рычагом 9 с вертикальной осью 10 вращения и стопорятся от произвольного перемещения фиксирующими защелками 11.
На горизонтальных поверхностях верхних клиньев 5, 7 жестко закре- пле1ш вертикальные П-образные щток 12 и 13, на верхние поверх ности которых шарнирно опираются внутренни
0787.2 .
ми концами пролетные строения 1,2 в месте соединения их с концами балансира 3. Привод балансира помещен в яму 14 и предохраняется от загряз- 5 нений кожухом 15. Между скошенными поверхностями клиньев смонтированы подшипники 16.
Перемещение клиньев 6 и 8 осуществляется на подшипниках 17 в направляющих 18, а вертикальное перемещение клиньев 5, 7 обеспечивается наличием вертикальных направля- .ющих 19. Концы равноплечего рычага 9 выполнены с продольными отверстиями.
10
15
Устройство работает следующим образом.
В исходном положении (фиг. 1-4, 9) пролетные строения 1 и 2 и равноплечий балансир 3 находятся в горизонтальном положении. Надвиг вагонов производится слева направо (фиг. 1). При этом в приводе балансира (фиг. 2) нижний клин 6 полностью вьщвинут под верхний клин 5, а .нижний клин 8 выдвинут из-под верхнего клина 7. Нижние клинья 6 и 8 застопорены фиксируюищми защелками 11 (фиг. 3). При этом верхние поверхности П-образных штоков 12 и 13 находятся на одном уровне, поддерживая пролетные строения 1,2 и балансир 3. Вагоны при таком положении устройства проходят без расцепления.
При необходимости расцепления в момент, когда задняя тележка отцепляемого вагона находится на пролет-, ном строении 1 перед передним плечом (по ходу движения вагонов) балансира 3, а передняя тележка - за пролетным строением 2 на неподвижном участке рельсового пути, подается сигнал на электромагниты фиксирующих защелок I1, которые освобождают клинья 6 и 8 под весом задней тележки отцеплямого вагона, верхний клин 5 скользит своей скощенной поверхностью по скошенной поверхности клина 6, перемещаясь в вертикальной плоскости вниз, и выталкивает клин 6, придавая ему поступательное движение по горизонтальной плоскости. Внутренний конец пролетного строения I и переднее плечо балансира 3 опускаются, при этом балансир вращается вокруг горизонтальной оси 4. Заднее плечо
балансира и внутренний конец пролетного строения 2 поднимаются, клин 6 перемещается поступательно, увлекает за собой шарнирно соединенное с ним левое плечо равноплечего рычага 9 и придает рычагу 9 вращательное движение вокруг вертикальной оси 10. Правое плечо рычага 9, двигаясь вращательно, увлекает за собой клин 8 и за счет шарнирного соединения с ним придает ему поступательное движение в горизонтальной плоскости. Клин 8, перемещаясь в направляющих, вдвигается под клин 7, который, скользя своей скощенной поверхностью по скошенной поверхности клина 8, перемещается в вертикальной плоскости и через П-об- разный шток 13 создает дополнительное усилие для поднятия заднего
конца балансира 3 и внутреннего конца пролетного строения 2. В перемещенных таким образом положениях нижние клинья 6, 8 автоматически стпорятся фиксируюш ми защелками 11 , сохраняя этим самым излом профиля пути в вертикальной плоскости (фиг. 10. При дальнейшем надвиге вагонов задняя тележка отцепляемого вагона поднимается по балансиру 3 до уровня поднятого внутреннего конца пролетного строения 2, а передняя тележка вагона, от которого происходит отцепление, опускается по пролетному строению 1 до уровня опущенного его внутреннего конца, при этом происходит взаимное перемещение автосцепок и их расцепление (фиг. 1Г). Если последующие вагоны должны проходить горку без расцепления, то в момент вступления передней тележки первого вагона надвигаемого отцепа на заднее плечо балансира 3 подается сигнал на электромагниты, а фиксирующие защелки 11 освобождают нижние клинья 6 и 8. Под тяжестью передней тележки этого вагона.заднее плечо балансира 3 и внутренний конец пролетного строения 2 опускаются, при это
10
20
07872
верхний клин 7 скользит своей скощенной поверхностью по скощенной поверхности клина 8 и, опускаясь вниз, выталкивает клин 8. При этом 5 балансир вращается вокруг горизонтальной оси 4, переднее плечо балансира 3 и внутренний конец пролетного строения 1 поднимаются, клин 8, перемещаясь поступательно, увлекает за собой щарнирно соединенное с ним правое плечо рычага 9, придавая ему вращательное движение вокруг, вертикальной оси 10. Левое плечо рычага 9, двига ясь вращатель- )5 но, увлекает за собой клин 6 и придает ему поступательное движение в горизонтальной плоскости. Клин 6, перемещаясь, в прямолинейных горизонтальных направляющих, вдвигается под клин 5, который, перемещаясь в вертикальных направляющих, поднимает П-образный шток 12, что создает дополнительное усилие для поднятия переднего плеча балансира 3 и внутреннего конца пролетного строения 1. В перемещенных таким образом положениях нижние клинья 6, 8 автоматически стопорятся фиксирующими защелками 11, при этом П-об- разные штоки 12 и 13 устанавливают путь в горизонтальное положение/
Для обеспечения минимального расчленения стыков рельсового пути в месте соединения внутренних концов пролетных строений с концами балансира соединение пролетных строений с балансиром производится посредством специальных фигурных проушин с отверстиями на их концах, находящимися на уровне головки рельсов, уложенных на пролетных строениях и балансире (фиг. 1 и 6).
Управление работой фиксирующих защелок может осуществляться различ- ными способами: - автономный режим, управление с пульта, расположенного на горке, автоматический с использованием устройств, отсчитывающих количество вагонов и определяющих их место нахождения.
25
30
35
40
15
I lE2
11 11
фиг, 6
(Pi/e. tf
в-в
U x / И
А,
DhlEZZZ&Z
г-г
фиг. 8
у / /9 -/ Л /-/- А
фиг. 10
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического расцепления движущихся вагонов | 1987 |
|
SU1421587A1 |
| Устройство для автоматического расцепления движущихся вагонов | 1988 |
|
SU1615002A1 |
| Устройство для автоматического расцепления вагонов | 1979 |
|
SU787227A1 |
| Устройство для автоматического расцепления железнодорожных вагонов | 1980 |
|
SU901125A1 |
| Устройство автоматического расцепления железнодорожных вагонов | 1989 |
|
SU1766749A1 |
| Автоматическая сцепка для руднич-НОгО РЕльСОВОгО ТРАНСпОРТНОгОСРЕдСТВА | 1979 |
|
SU797936A1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ | 2005 |
|
RU2295468C1 |
| БЛОКИРАТОР МЕХАНИЗМА АВТОСЦЕПКИ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 1996 |
|
RU2097238C1 |
| Напольное устройство для автоматического расцепления единиц подвижного железнодорожного состава | 1982 |
|
SU1084164A2 |
| Автоматическое беззазорное сцепное устройство подвижного состава железнодорожного транспорта | 2024 |
|
RU2838272C1 |
f/- -/ )(.7 --/y r 4 y.V
V
uz. п
Составитель В.Отвечалин Редактор М.Келемеш Техред М.НадьКорректор А.Зимокосов
Заказ.153/24 Тираж 474Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Устройство для автоматического расцепления вагонов | 1979 |
|
SU787227A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
