1
Изобретение относится к средства управлений многобарабанными ленточными конвейерами.
Целью изобретения является по- вьшение точности управления конве- йером при растяжении ленты.
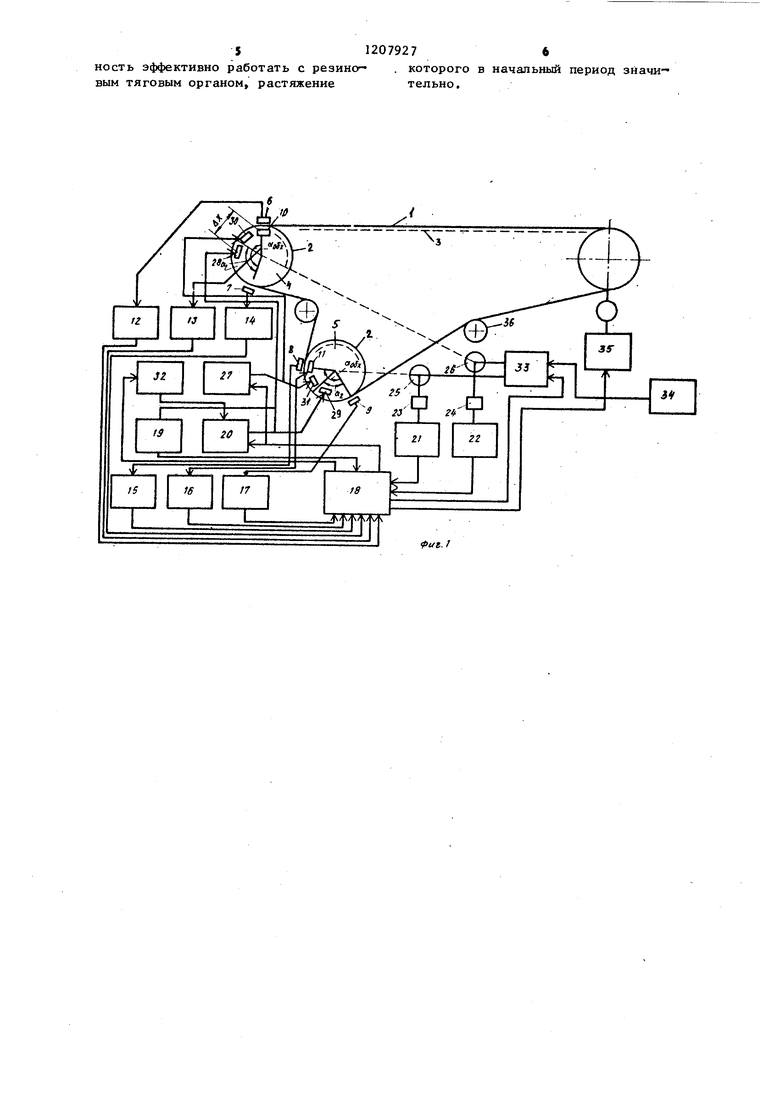
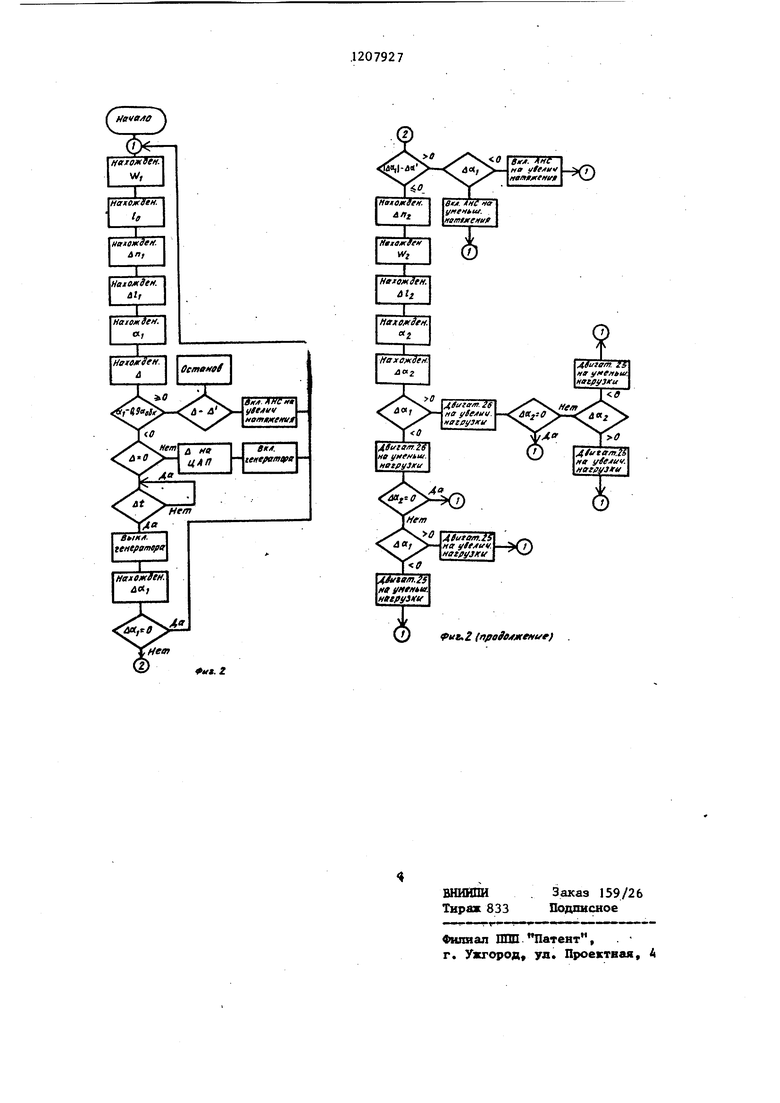
На фиг.1 приведена схема устройства; на фиг.2 - алгоритм функционирования устройства.
Устройство включает в себя маг- нитные метки 1 и 2 на магнитном покрытии тягового органа 3 и приводных барабанов 4 и 5, датчики 6-9 движения тягового органа 3 по барабанам 4 и 5 соответственно, датчики 10 и 11 вращения барабанов, которые подключены через преобразователи 12-17 частота - код к входам блока 18 формирования импульсов управления (ЖУ) . К другим входам через преобразователь 19 частота - ко подключен генератор 20 записи и через преобразователи 21 и 22 ток- код - датчики 23 и 24 тока роторов приводных двигателей 25 и 26. К выходу блока ФИУ 18 подсоединены генераторы 20 записи и 27 стирания,- выходы которых соединены с магнитными головками 28 и 29 записи и 30 и 31 стирания соответственно. К второму выходу блока ФИУ 18 подключен преобразователь 32 код-аналог, выход которого соединен с генератором 20 записи. К третьему выходу блока .18 подключен один из выходов блока 33 управления приводами конвейерной установки, второй вход которого соединен с блоком 34 задания скорости конвейерной уст ановки, а выходы - с приводными двигателями 25 и 26. Четвертый выход блока 18 соединен с входом блока 35 управления натяжной станцией, выход которого соединен с натяжной станцией 36.
Принцип работы устройства основан на поддержании углов рабочего проскальзывания о(, и о: 2 на приводных барабанах за счет перераспределения тяговых усилий на них и изменения натяжения тягового органа. Для определения угла рабочего проскальзывания использована формула
лР; 0.
где й
J il5j i-yft
сокращение тягового органа в точке сбегания с приводного барабана;
079272
угол рабочего проскальзывания i -го барабана; Wg - тяговое усилие I-го барабана; модуль упругости тягового
органа.
Для осуществления регулирования подьемно-транспортной установки на тяговый орган 3 наносят магнит- 10 ное покрытие с магнитными метками 1 и 2. На приводные барабаны 4 и 5 наклеивают магнитную ленту и с помощью генератора 20 посредством магнитных головок 28 и 29 на ней 15 записывают частоту, равную частоте нанесения меток на тяговом органе 3. Поскольку трудно определить границу дуги покоя и дуги рабочего проскальзывания (т.е. место установки дат- 20 чиков контроля движения тягового органа влияет на точность регулирования) , датчики 6, 8 и 7, 9 в устройстве расположены в местах набегания и сбегания тягового органа 3 25 на барабаны и с барабанов 4, 5 соответственно. Датчики 10 движения барабанов 11, магнитные головки 28 и 29 записи и 30 и 31 стирания устанавливают рядом, чтобы величина л X 30 (расстояние между магнитной головкой 28 и датчиком 10 движения барабана) была минимальна.
Устройство работает следукяцим образо.
Магнитные метки 1 и 2, нанесенные на тяговый орган и барабаны 4 и 5, считываются соответствукшщми датчиками 6-11. Сигнал с них преобразуется в код и подается на вход блока ФИУ 18. На вход блока 18 через преобразователь 19 частота-код заводится частота генератора 20 записи и через преобразователи 21 и 22 ток-код - величина тока ротора
приводных двигателей 25 и 26. 1
Сначала блок ФИУ 18 определяет,
есть ли проскальзывание и какова его виличина. Для этого определяется тяговое усилие первого барабана 50 . Если скорость движения тягового органа 3 не изменяется, то
W- ...
где JpoT., ток ротора первого приводного двигателя 4; 55А - константа первого приводного двигателя 4. Далее находится расстояние между метками
35
40
45
р
i:где OJ - частота вращения приводного
барабана; R - его радиус;
fР- частота генератора записи. Величина рабочего сжимания тягового органа в месте сбегания его с барабана 4
uF. „л п/,
где ьп, Hg- Hg - разность сигнало
с датчиков 8 и 6 Теперь определяют угол рабочего проскальзывания по формуле
« - R
ОС,- В ,
где В - постоянная конвейера, и величину Д п,- п, показывающую что существует или проскальзывание, или растяжение тягового органа 3. Как известно, если угол рабочего проскальзывания больше 0,9 oig ( o6pgj - угол обхвата тяговым органо барабана), то существует проскальзывание. Величина проскальзывания сравнивается с установленной величиной А : если она меньше ее, то цифровой вычислительный блок 18 выдает сигнал на включение натяжной станции 3 на увеличение натяжения, если же больше, то это аварийный режим, выдается сигнал на остановку конвейера и блок ФИУ 18 переходит в начало программы.
Если угол рабочего проскальзывания меньше 0,906, то проскальзывания нет, если О, то это указывает на растяжение ленты. Величина Д подается на преобразователь 32 код-аналог, включается генератор 20 записи,частота которого под воздействием напряжения с блока 32 становится равной частоте меток на тяговом органе 3. Одновременно с генератором 20 записи включается генератор 27 стирания, который осуществляет стирание предыдущих меток. Блок ИИУ 18 возвращается к началу программы. Генератор 20 записи при А О включается
1 Y
не сразу, а через bt , для
0 R
того, чтобы генератор 20 записал новую частоту по вс ей окружности. Затем блок ФИУ 18 определяет величину /4)6., (0,8-0,85)oio6x-
207927
Величина 0,8-4),85 зависит от конкретного конвейера, наличия футеровки, условий эксплуатации W определяется э.кспериментально. Если
5 .йо(.,0, то конвейер работает в
оптимальном режиме и блок 18 возвращается в начало программы; если нет, то дл, сравнивается с заданной величиной . Если она больше
10 заданной величины, то в зависимости от полярности ioi, блок 18 выдает команду блоку 35 управления натяжной станцией 36 на увеличение или уменьшение натяжения и переходит в нача-
15 ло программы; если же меньше, то определяется угол рабочего проскальзывания на втором барабане 5, находится bei (0,8-0,85) Cioj 2 и анализируется четыре возможных
20 варианта. При&(,0 блок ФИУ 18
выдает команду на увеличение нагруз- ки на двигатель 26 и анализирует величину i.o(.j. При Л о 0 блок ФИУ 18 возвращается в начало программы;
25 если нет, то при выдается команда на уменьшение нагрузки на двигатель 25, а при i odj 0 - команда на увеличение нагрузки на двигатель 26, и блок 18 возвращается в начало
2Q программы. При л (Х., : О блок 18 выдает команду на уменьшение нагрузки на двигатель 26 и опять анализирует величину i(У,2. Если Aoi 0, то блок 18 переходит в начало программы; если нет, то (, выдается команда на увеличение нагрузки на двигатель 25, а при О - команда на уменьшение нагрузки на двигатель 25, и блок 18 начинает выполнять программу сначала.
40
Таким образом, работая по этой программе, устройство поддерживает заданные углы рабочего проскальзывания путем перераспределения на45 груэки между приводными двигателями и изменения натяжения тягового органа. Поддержание оптимальных углов рабочего проскальзывания на приводных барабанах подъемно-транспортной
50 установки обеспечивает оптимальный режим ее работы и таким образом увеличивает срок службы тягового органа. Это устройство эффективно контролирует проскальзывание, т.е.
55 .устраняет аварийные ситуации.
Применение устройства контролирования растяжения дает возмож-
35
S12079276
ность эффективно работать с резино- . которого в начальный период значи- вым тяговым органом, растяжениетельно.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многобарабанной, подъемно-транспортной установкой | 1977 |
|
SU899426A1 |
| Устройство для управления подъемнотранспортной установкой с гибким тяговым органом | 1975 |
|
SU602430A1 |
| Устройство для измерения величины проскальзывания ленты конвейера | 1982 |
|
SU1027116A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Промежуточный вакуум-привод ленточного конвейера | 1986 |
|
SU1426897A1 |
| Стенд для испытания упругих тяговых органов | 1982 |
|
SU1146568A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Ленточный конвейер | 1983 |
|
SU1077835A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1969 |
|
SU475336A1 |
| УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ ТРАНСПОРТИРУЮЩЕГО ОРГАНА | 1991 |
|
RU2013331C1 |

. f
Нвгамеен. W,
Hai4 ii4ltH. Iff
HtttomieM. &n,
омЗем.
Л1,
HatoMle. t
ho
(npaie MtHuf)
ВНИИПИ Тираж 833
Заказ 159/26 Подписное
Филиал ШШ 11атент, . г. Ужгород, уя. Проектная, А
