Hoe истирание тягового органа, следовательно, сокращение его срока службы.
Цель изобрете 1ия - повышение срока службы тягового органа.
Для этого предлагаемое устройство для управления подъемно-транспортной установкой с гибким тяговым органом снабжено задатчиком коэффициента сцепления гибкого тягового органа с барабанами и блоками изменения сцепения тягового органа с барабанал5и, состоящими каждый из сумматоров, делителя, функционального преобразователя и узла ограничения, причем один из входов делителя и вхоы одного из сумматоров каждого блока изменения сцепления гибкого тягового органа с арабанами подключены к выходам блока определения углов проскальзывания, выход этого сумматора подключен к другому входу деителя, выход которого соединен с одним нз входов функционального преобразовг1те..пя, второй вход которого ьодключен к узлу ограничения, а выход к одному из входов другого умматора, второй зход которого подк, к задатчику Коэ(5)фициеита , а выход - к блоку определения углов проскальзывания.
На чертеже изображено устройство управления подъемно-траисиортной устг1аовкой с гибким тяговым органом.
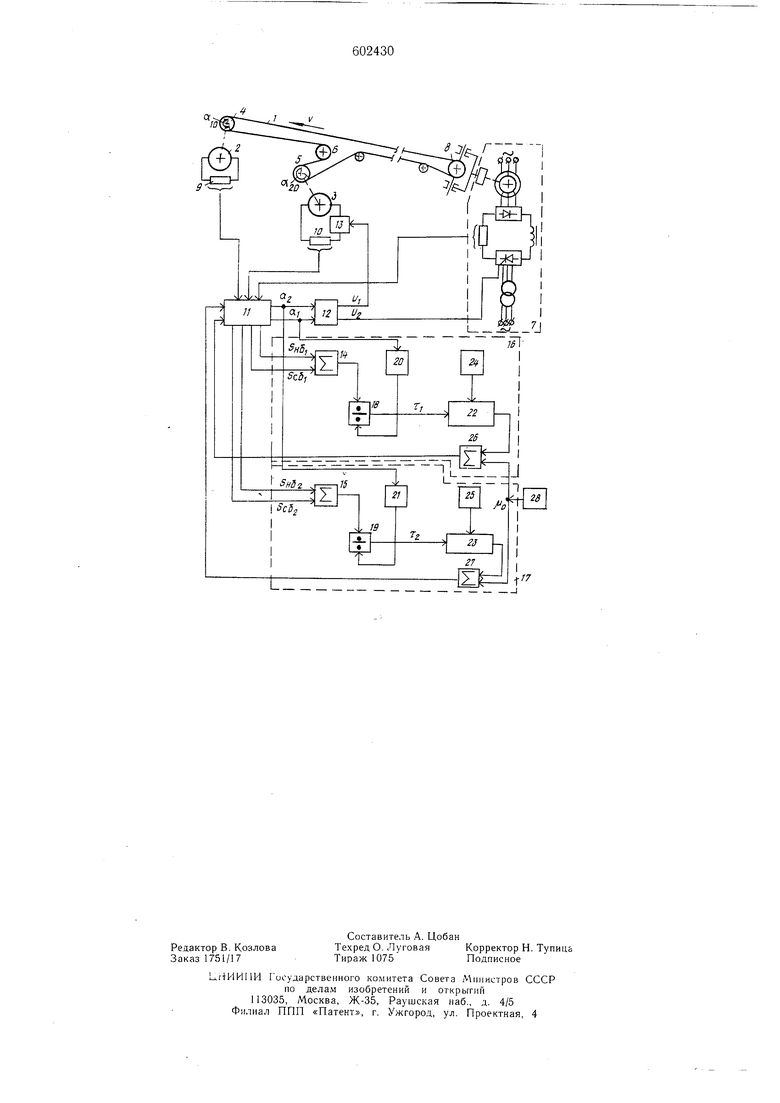
Предлагаемое устройство содержит тяговый орган 1, связанный с приводными дв:1гателями 2 и 3 посредстЕзом приводных барабанов 4 и 5,. отклоняющий барабан 6. С ojiOKOM 7 регулирования натяжения тяговый орган 1 связан через натяжной барабан 8.
Датчики усилия 9 и 10, включенные в главную цепь приводных двигателей и и 3, соединены с одним и другим входами П определения углов проскальзывгиь. третий вход которого подключен к блоку 7 регулирования натяжения, а выходы (iOj}j., к блоку 12 сравнения.
Выходы блока сравнения с регулятором 13 момента одного из приводных двигателей (3) и с блоком 7 регулчр)заиия натяжения.
Выходы блока 11 соединеяы с сумматорами 14 и 15 блоков 16 и 17 из-меиония сцепления гибкого тягового органа с барабанами (БИС I, БИС 2), а выходь: кйждог{1 из сумматоров 14 и 15 подсоедиис. соответственпо к одному из входов делителей 18 к И), второй вход которых через ,пи 20 я 2i подключён к выходу блока п.
Выходы делителей 18 и 9 г одключс)Ь соответственно к одному из входоп функциональных преобразователей 22 п 23, вторые входы которых подсоеди -;еяы к уз.;1Ум ограничения 24 и 25, а выходы к одн.;му из входов сумматоров 26 и 27, вторые входы сумматоров соединены с задатч ком 28 коэфф циента сцепления, а выходы - с блоком II онроделения углов нроскальзывання.
Мри изменениях. загрузки коивсй;:ра и из: монении удельного давления па футеровку приводных барабанов коэффициент сцепления тягопого органа с футеровкой ко.;н:б. в результате изменения его физико-механических
свойств. Изменение коэффициента сцепления начинается при удельнол давлении выше 0,9 кг/см 2, которое характерно для большинства конвейеров. Компенсация изменения коэффициента в зависимости от удельного давления осуществляется регулированием натяжения в функции изменения этого параметра. Удельное давление ti, Т2 на приводные барабаны 4 и 5 определяется в блоках 16 и 17 из.менения сцепления по формуле
3H6i4- + ЗсДг
в л 2/ Вллг
где 5иЙ1 8н(1г-усчлия в точках набегания тягового органа на приводные барабаны; Scff, Ссбг- усилия в точках сбегания тягового органа с приводных барабанов;
л -3,4-прстояняый коэффициен
В- ширина тягового органа
ai а.г-углы проскальзывания
на приводных барабанах. Углы проскальзыван1 я и усилия в очках набега яия и сбегання тягового органа с приводных барабанов 4 и 5 определяются посредством блока )1 определения углов проскальзывания, на в.код которого подаются сигналы с датчиков усилия 9 и 10 и блока 7 регулирования натяжения.
Усилия 5цй,.5сб,и 5„5, SHUJ, суммируются соответственно D сумматорах 14 и 15, и результирующий сигнал по,ается на входы делителей ,18 и 19, jia вторые входы которьцх через усилители 20 и 21 поступают сигналы, нропорциоиальные площади по дуге проскальзывания Bjiai и Вэтаг приводных барабанов. На выходах делителей 18 к 19 получаются текущие удельные давления TI и т-г, которые в функциональных преобразователях 22 и 23 сравниваются с заданным посредством узлов ограничения 24 и 25 (равным 0,9 кг/см при г с 2 -- 0,9 кг/см выходные сигналы равны нулю). Пря превышении заданной величниы ка выходах функциональных преобразопателей 22 и 23 получаются сигналы, которые алгебраически суммируются в сумматорах 26 и 27 с сигналом задатчика коэффидиеггга сцепления 28., и разностные сигналы каиряжепия подаются на блок И определения углов проскальзывания. На его выходе под действие. этих сигналов получаются бо., чем оря т 0,9 кг/см, значения углов проскальзывания as, «2, которые в блоке 2 сравнения суммируются, а также вычитагслсн.
Подученные сигналы су.ммы и разности соот1,етстБенно сравниваются с адаинымя предельно, допустимой суммой, ручной 0-9 ( --1- «20) и разностью, определяемых кинематической схемой и технологическими углами обхвата.
Сигнал разбаланса разности Ui поступает на вход регулятора момента приводного д1}нгателя, который увеличивает или уменьшает его м.омент в соответствии с величиной и знаком сигнала рассогласования. Момент двигателя регулируется до тех пор, пока углы рабо О проскальзывания на приводных барабанах с.ану. pSBiifci между собой ai а 2 (гфн равенстве углов обхиата ою U2o) или пропорциональны (при )При этом приводные двигатели имеют равную или пропорциональную нагрузку. Сигнал разбаланса суммы Uz с выхода блока 12 сравнения подается на вход блока 7 регулирования натяжения, который,,воздействуя на натяжной барабан 8, изменяет натяжение тягового органа 1 в соответствии с величиной и знаком сигнала рассогласования. Увеличением величины натяжения тягового органа компенсируется изменение коэффиЩ1ента сцепления, при котором тяговые усилия приводных барабанов максимальны. Предлагаемое устройство для управления подъёмно-транспортной установкой с гибким TfflroBUM органом за счет регулирования момента приводного двигателя и натяжения тягового органа при изменениях загрузки конвейера позволяет реализовать режим с равными и минимальными.запасами тяговых возможностей приводных барабЬнов с компенсацией коэффициента с епления. При этом полностью используются тяговые способности барабанов, исключаются перетяжка м гфоскальзывание тягового органа за счет поддержания натяжения, необходимого только для передачи тягового усилия. Срок службы предлагаемого тягового органа повышается. Формула чзобретения Устройство для управления подъемно транспортной установкой с гибким тяговым органом, содержащее датчики усилия, соединенные с одним н другим входами блока определения угла рабочего проскальзывания, третий вход которого подключен к блоку регулирования натяжения, .а выходы подключены к входам блока сргвнения, выходы которого соединены с регулятором момента одного из приводных двигателей и блоком регулирования натяжения, отличающееся тем, что, с целью повышения срока службы тягового органа, оно снабжено задатчиком коэффициента сцепления и блоками изменения сцепления гибкого тягового органа с барабанами, состоящими каждый из сумматоров, делителя, функционального преобразователя и узла ограничения, причем один и-3 входов делителя и входы одного из сумЛ5аторов каждого блока нзменения сцепления гибкого тягового органа с барабанами подклю-цены к выходам блока определения углов проскальзывания, выход зтого сумматора подключен к другому входу делителя, выход которого соединен с одним из входов функционального преобразователя, второй вход которого подключен к узлу ограничения, а выход к одному из входов другого сумматора, второй вход которого подключен к задатчнку коэффициента сцепления, а выход - к блоку определения проскальзыванпя. Источники информации, принятые во внимание при экспертизе; t. Авторское свидетельство СССР № 154988, л. В 66 D 5/30, 962. 2. Патент Великобритании № 1276645, кл. G 3 Р, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Устройство для управления многобарабанной, подъемно-транспортной установкой | 1977 |
|
SU899426A1 |
| Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1986 |
|
SU1425141A1 |
| Многобарабанный конвейер | 1984 |
|
SU1207927A1 |
| Устройство для управления много-пРиВОдНОй пОд'ЕМНО-ТРАНСпОРТНОйуСТАНОВКОй C гибКиМ ТягОВыМ ОРгА-HOM | 1979 |
|
SU800052A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Устройство обнаружения боксования и юза колес транспортного средства | 1986 |
|
SU1371933A1 |
| Натяжное устройство для передач с гибкой связью | 1990 |
|
SU1728557A1 |
| Устройство защиты от боксования и юза | 1986 |
|
SU1411172A1 |