1
Изобретение относится к цодъем- но-транспортной технике, а именно к вакуумным грузоподъемным устройствам, предназначенным для захвата и удержания грузов при их подъеме и транспортировании.
Известно вакуумное грузозахватное устройство, содержащее навешиваемую на крюк крана траверсу, включающую две емкости, первая из которых соединена с источником вакуума , а вторая - через распределительный кран - с коллектором вакуумных присосов LI.
Недостатком рассматриваемого устройства является низкая экономическая эффективность работы, гак как при отсоединении груза коллектор и соединенные с ним рабочие камеры присосов сообщаются с атмосферой, в результате чего вся энергия, затраченная на создание разности давлений воздуха (вакуума) в присосах и коллекторе, расходуется безвозвратно.
Цель изобретения - повышение экономичности в работе вакуумного грузозахватного устройства путем сокращения расхода энергоносителя.
Поставленная цель достигается тем, что в вакуумном грузозахватном устройстве, содержащем наве- шиваемую на крюк крана траверсу, включающую две емкости, первая из которых соединена с источником вакуума, а вторая - через распределительный кран с коллектором вакуумных присосов, первая и вторая емкости сообщены между собой посреством перепускнбго автоматического клапана, а распределительный кран вьтолнен трехпозиционным и: соединен с первой емкостью.
Кроме того, вторая емкость выполнена с объемом, равным или большим сумме объемов присосов и коллектора.
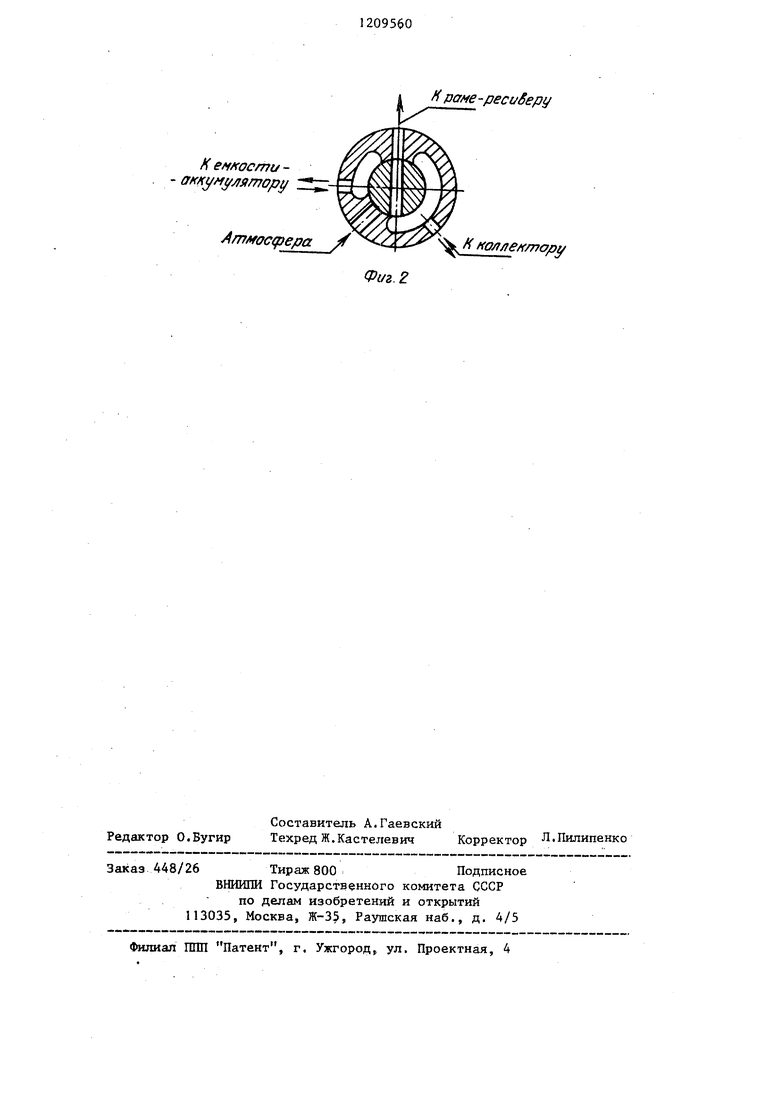
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 принципиальная схема воздухораспределительного крана позиционного переключения .
Вакуумное грузозахватное устройство содержит навешиваемую на крюк крана траверсу, состоящую из емкости-ресивера 1, соединенного с источником 2 вакуума, коллектора 3 присосов 4, сообщенных с коллекто- .ром 3 посредством органов управле2095602
ния - запорных вентилей 5, емкости-- аккумулятора 6, воздухораспределительного крана 7 позиционного переключения, перепускного дифференци. ального мембранного клапана 8 автоматического действия, органов контроля и очистки воздуха (не показаны).
Устройство работает следующим образом.
0 Источником 2 вакуума в.емкости- ресивере 1 создается вакуум. Тра- верса устанавливается на поверхность подаежащего транспортированию груза 9. Запорные вентили 5 устанавливают.
j,| ся в положение, соответствующее назначению присосов (в зависимости от формы и габаритов груза присосы 4 сообщены с коллектором 3 или разобщены с ним), при этом воздухорас2Q пределительный кран 7 . находится в положении, когда коллектор 3 сообщен с атмосферой, а каналы от емкости-ресивера 1 и емкости-аккумулятора 6 перекрыты.
25 Воздухораспределительный кран 7 переводят в положение сообщения емкости-ресивера 1 с коллектором 3 фиг. 2), в результате чего в коллекторе 3 и сообщенньк с ним при- сосах 4 создается вакуум заданного значения. Под действием разности давлений воздуха внутри и снаружи рабочих камер присосов 4 груз 9 удерживается при подъеме и транспортировании.
30
35
40
45
SO
Для отсоединения груза воздухораспределительный кран 7 первоначально переводится на позицию, соответствующую следующему положению аппаратов: емкость-ресивер 1 перекрыта, емкость-аккумулятор 6 сообщена с коллектором 3 и рабочими камерами присосов 4.В этом положении происходит отсос воздуха из емкости-аккумулятора 6, и при равенстве давлений кран 7 переключают на разобщение коллектора 3 с емкостью-аккумулятором 6 и на сообщение его с атмосферой. Б этом положении траверса- отводится от груза 9.
Повторные операции по транспортированию груза производят в обратной последовательности переключения воздухораспределительного крана, а именно: коллектор 3 разобщают с атмосферой и сообщают с емкостью-аккумулятором 6, после вьфавнивания давления коллектор разобщают с емкостью-аккумулятором и сообщают с емкостью-ресивером 1. В этом положении гфуз транспортируют. Таким образом, в емкости-аккумуляторе 6 после нескольких сообщений с коллектором 3 устанавливаются определенные значения давлений (вакуума) воздуха, соответствующих положению крана. Давление воздуха в емкости- аккумуляторе зависит от значения давления, поддерживаемого в процессе работы в емкости-ресивере 1, от соотношения рабочих объемов емкости-; аккумулятора 6 Vp, и подключаемых к нему объемов коллектора 3 V рабочих камер присосов 4 со всеми коммутациями . Оптимальная разность давлений воздуха в аккумуляторе 6 устанавливается, когда Уд равен или больше сумме подключаемых объемов Уц и УПР ,
Расчеты показывают, что установка емкостей-аккумуляторов позволит экономить расход энергоносителя на 50-60%, что приводит к существенному сокращению потребляемой электроэнергии. Накопленная в емкости-аккумуляторе энергия используется в случаях внезапного отключения электроэнергии, питающей привод источника вакуума, для увеличения времени удержания груза.
Известно, что время удержания груза при отключенном источнике вакуума зависит от глубины вакуума, рабочих объемов, сообщенных с рабочими камерами присосов, скорости натекания воздуха в камеры присосов через неплотности различного характера и других факторов. При прочих равньпс условиях с увеличением объема емкостей, сообщенных с присоса- ми, время удержания груза увеличивается, поэтому для рационального использования имеющихся в конструкции объемов, находящихся под вакуумом, емкость-аккумулятор 6 сообщена с емкостью-ресивером I перепускным дифференциальным мембранным клапаном 8 автоматического действия.
095604
Система работает следующим образом.
В транспортном положении рабочие камеры присосов 4 сообщены через
5 коллектор 3 с емкостью-ресивером 1. Ilpk внезапном отключении источника вакуума, в результате натекания воздуха через различного рода неплотности, давление (абсолютное)
0 в системе увеличивается. При значении давления в ресивере 1, пре- вьш1ающем давление в аккумуляторе 6, мембрана клапана 8 перемещается влево, т.е. клапан 8 автоматичес15 ки открывается и сообщает обе емкости. Включенный в работу объем емкости аккумулятора увеличивает время удержания груза.
В связи с тем, что емкость-аккумулятор в этих условиях компенсирует лишь натекание воздуха через неплотности в системе, прохо ;ные сечения дифференциального мембранного клапана 8 принимаются небольшими, что соответственно определяет малые габариты клапана, т.е. установка клапанов не вызьюает значительного увеличения массы грузоподъемного устройства.
Воздухораспределительный кран 7 позиционного переключения может состоять из стандартных электромагнитных клапанов с позиционным электрическим переключателем. .
Емкость-аккумулятор, как правило , выполняется как составная часть несущей конструкции траверсы, занимая внутренние объемы трубных перемычек, т.е. ввод нового элемента в состав устройства не влечет увеличения массы траверсы и грузоподъемного механизма в целом.
Все это создает предпосылки к внедрению предлагаемого устройства без существенного увеличения капитальных затрат, однако его экономическая эффективность значительно увеличивается при одновременном повы- шении надежности работы.
К effffocmu- OKKyMif/ramopt/
Атмос(рера X :p f нол/1е шо 1
Фиг. 2
ff раме -pectjSepy
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1982 |
|
SU1094831A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1252282A1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Грузозахватное устройство | 1990 |
|
SU1791321A1 |
| Вакуумное грузозахватное устройство | 1989 |
|
SU1735187A1 |
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373667A1 |
| Вакуумное захватное устройство | 1979 |
|
SU846480A1 |
| Вакуумное грузозахватное устройство | 1979 |
|
SU829537A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1306881A1 |
Редактор О.Бугир
Составитель А.Гаевский
Техред Ж.Кастелевич Корректор Л.Пилипенко
Заказ 448/26 Тираж 800Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород ул. Проектная, 4
| Вайнсон А.Л | |||
| и Андреев А.Ф | |||
| Крановые грузозахватные устройства | |||
| М., 1982, с | |||
| Ручная тележка для грузов, превращаемая в сани | 1920 |
|
SU238A1 |
| рис | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ТАРТАНИЯ | 1915 |
|
SU415A1 |
