(21)4052241/40-11
(22)09.04.86
(46) 15.02.88. Бюл. № 6
(72) В.П. Наплеков, Б.З. Шац
и Ю.Н. Шкловский
(53) 621.86.061 (088.8)
(56) Авторское свидетельство СССР
№ 791584, кл. В 66 С 1/02, 1977.
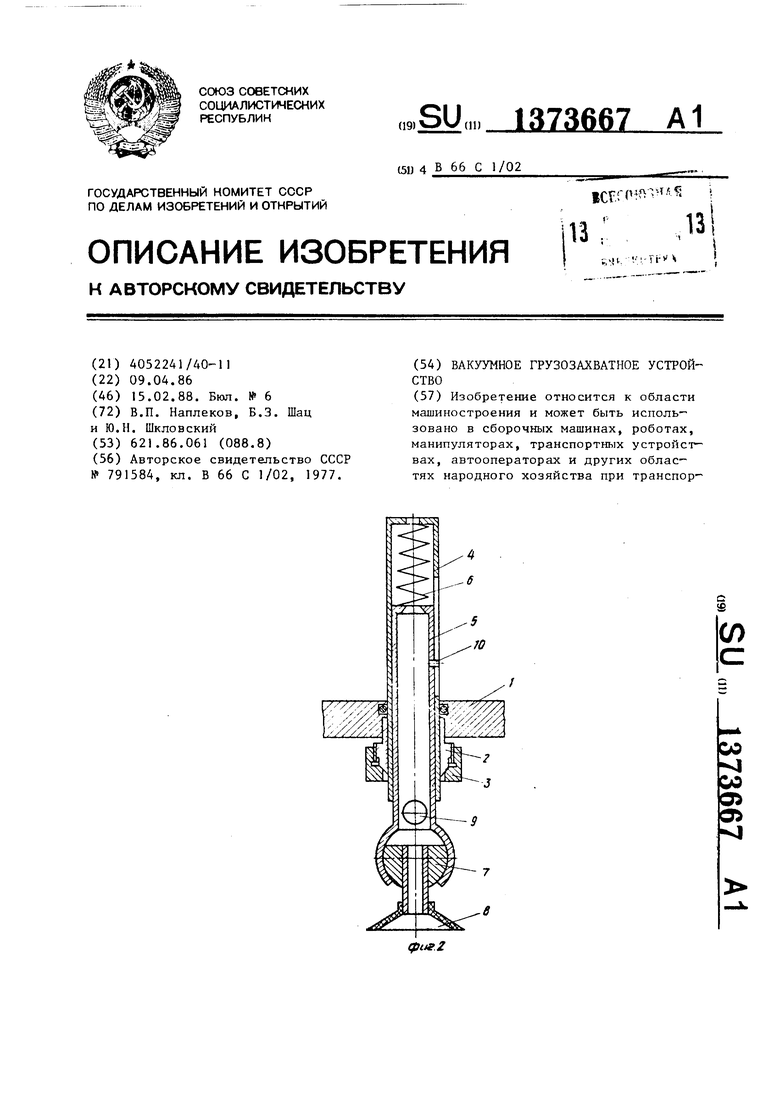
(54) ВАКУУМНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
(57) Изобретение относится к области машиностроения и может быть использовано в сборочных машинах, роботах, манипуляторах, транспортных устронст - вах, автооператорах и других областях народного хозяйства при транспор
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитно-вакуумный захват | 1985 |
|
SU1366396A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Вакуумный схват | 1989 |
|
SU1763174A1 |
| Индукционное устройство для разборки прессовых соединений | 1986 |
|
SU1362605A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
| Грузозахватное устройство | 1990 |
|
SU1745664A1 |
| Устройство для сборки деталей типа вал-втулка | 1981 |
|
SU1065126A1 |
| Вакуумное захватное устройство | 1984 |
|
SU1187985A1 |
| Вакуумное грузозахватное устройство | 1977 |
|
SU650938A1 |
| Станок для сборки узлов | 1977 |
|
SU677801A1 |
(Л
со
00 Од
а
тировке грузов с любой формой поверхности. Целью изобретения яапяет- ся повьш1еиие надежности работы. Ва куумное грузозахватное устройство содержит закрепленные в сквозных отверстиях Траверсы I посредством фиксаторов захваты, на конце каждого из которых установлен с помощью шарового шарнира 7 присос 8. Второй конец захватов соединен с вакуумным коллектоИзобретение относится к машиностроению и может быть использовано в сборочных мапшнах, роботах-манипуляторах, транспортных устройствах, ав- тооператорах и других областях народного хозяйства при транспортировке грузов с любой формой поверхности.
Целью изобретения является повышение надежности работы.
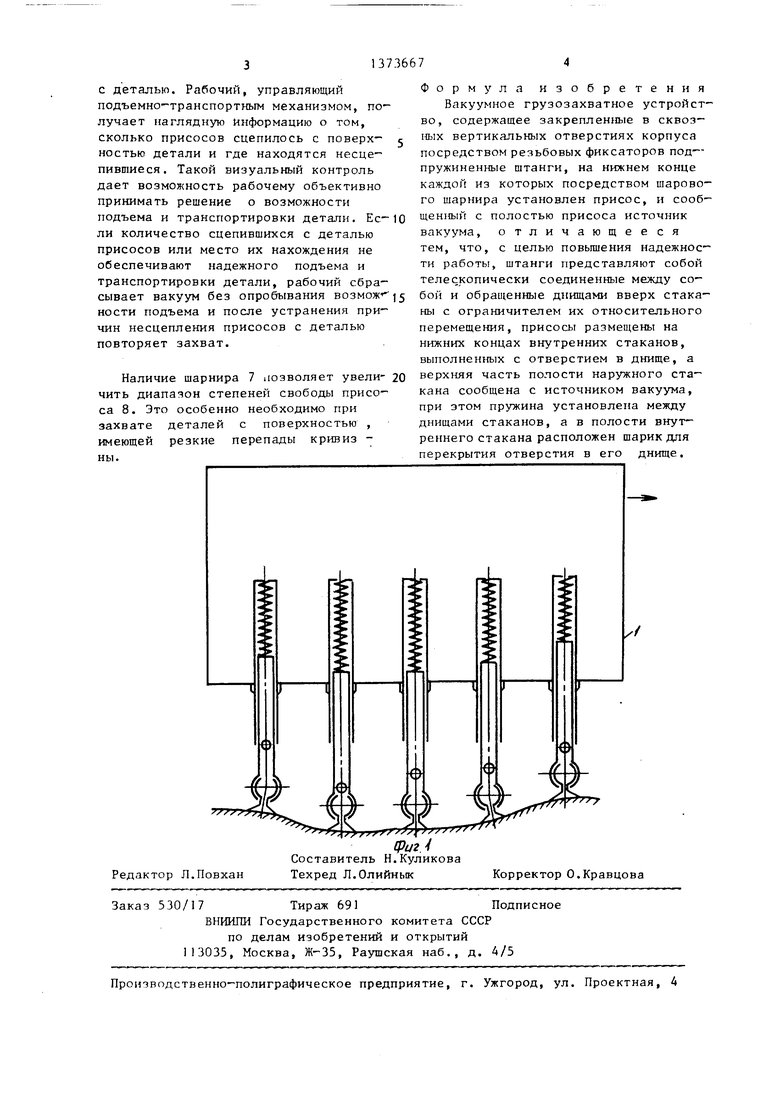
На фиг.1 изображено вакуумное грузозахватное устройство, разрез; на фиг.2 - вакуумный захватный орган, разрез.
Устройство содержит корпус 1, яв- ЛЯЮ1ЦИЙСЯ одновременно вакуумным коллектором, на котором с помощью фиксаторов, состоящих из разрезных втулок 2 и гаек 3, закреплены захваты. Захваты выполнены в виде телескопически соединенных стаканов: внутреннего 4 и наружного 5. В торцах стаканов имеются отверстия. Между стаканами находится пружина 6. К нижней части стакана 5 через шаровой шарнир 7 прикреплен вакуумный присос 8. В стакане 5 находится шарик 9, способный свободно перемещаться. Диаметр шарика 9 выбран таким, чтобы, свободно перемещаясь внутри стакана 5, он не мог из него выпасть. Для удержания стакана 5 в стакане 4 в цилиндрическую стенку стакана 5 вставлен штифт 10, а в стенке стакана 4 выполнен соответствующий паз. Возможно и иное конструктивное решение, ограничиваю- Djee выпадение стакана 5 из стакана 4. Например, на внешней стороне цилиндрической поверхности стакана 5 и на внутренней стороне цилиндрической пором. Захваты выполнены в виде телескопически соединенных подпружиненных стаканов 4 и 5 с отверстиями в торцах с ограничением хода одного относительно другого. Внутри одного из стаканов свободно расположен шарик 9, перекрывающий доступ вакуума через отверстие в торце стакана в случае неприсасывания захвата к поверхности детали. 2 ил.
верхности стакана 4 можно выполнить кольцевые буртики. Касаясь друг друга, буртики ограничивают перемещения стакана 5 в стакане 4.
Для лучшей фиксации шарика 9 в отверстии в торце стакана 5 отверстие выполняют конической формы.
Устройство работает следующим образом.
Корпус I с помощью подъемно-транс- портного устройства (не показано) опускается на деталь. По мере опускания присосы 8 касаются поверхности детали и с помощью шарнира 7 и за
счет собственной гибкости и эластичности ориентируются по нормали к поверхности, т.е. занимают положение, при котором присос работает наиболее эффективно.
При дальнейшем опускании корпуса 1 стакан 5 перемещается в стакане 4, сжимая пружину 6. После того, как все присосы прижаты к детали, перемещение вниз прекрал;ают. В вакуумном коллекторе 1 создают вакуум, -благодаря чему присосы 8 сцепляются с деталью.
Если по каким-либо причинам сцепления на происходит (присос попадает 30 в отверстие, на отверстие, на паз, на трещину, на сильно загрязненную поверхность и т.п.), поток воздуха, попадая через присос 8 в стакан 5, увлекает с собой шарик 9 и прижимает его к отверстию в торце стакана 5, прекращая тем самым расход вакуума. Затем стакан 5 вместе с присосом 8, преодолевая действие пружины 6, поднимается в стакане 4, показывая этим отсутствие сцепления данного присоса,
35
с деталью. Рабочий, управляющий подъемно-транспортным механизмом, получает наглядную Информацию о том, сколько присосов сцепилось с поверх- ностью детали и где находятся несцепившиеся. Такой визуальный контроль дает возможность рабочему объективно принимать решение о возможности подъема и транспортировки детали. Еели количество сцепившихся с деталью присосов или место их нахождения не обеспечивают надежного подъема и транспортировки детали, рабочий сбрасывает вакуум без опробывания возмож ности подъема и после устранения причин несцепления присосов с деталью повторяет захват.
Наличие шарнира 7 позволяет увели- чить диапазон степеней свободы присоса 8. Это особенно необходимо при захвате деталей с поверхностью , имеющей резкие перепады кривиз - ны.
Л.Повхан
Уг.
(Риг У
Составитель Н.Куликова Техред Л.Олийнык
Формула изобретения
Вакуумное грузозахватное устройство, содержащее закрепленные в сквозных вертикальных отверстиях корпуса посредством резьбовых фиксаторов под- пружиненные штанги, на нижнем конце каждой из которых посредством шарового шарнира установлен присос, и сообщенный с полостью присоса источник вакуума, отличающееся тем, что, с целью повьш1ения надежности работы, штанги представляют собой телескопически соединенные между собой и обращенные днищами вверх стаканы с ограничителем их относительного перемещения, присосы размещены на нижних концах внутренних стаканов, выполненных с отверстием в днище, а верхняя часть полости наружного стакана сообщена с источником вакуума, при этом пружина установлена между днищами стаканов, а в полости внутреннего стакана расположен шарик для перекрытия отверстия в его днище.
Корректор О.Кравцова
