Изобретение о г носи гея к подъемно-транспортной технике, а именно к вакуумным захватным устройствам, и предназначено д.пя оснащения механизмов нодьема, транспорги- ровки грузов раз.личиыл (:;баритов о плоской поверхностью.
Цель изобретения - повышение надежности работы путем осуществление акгиьно- го контроля нагруженности присосов.
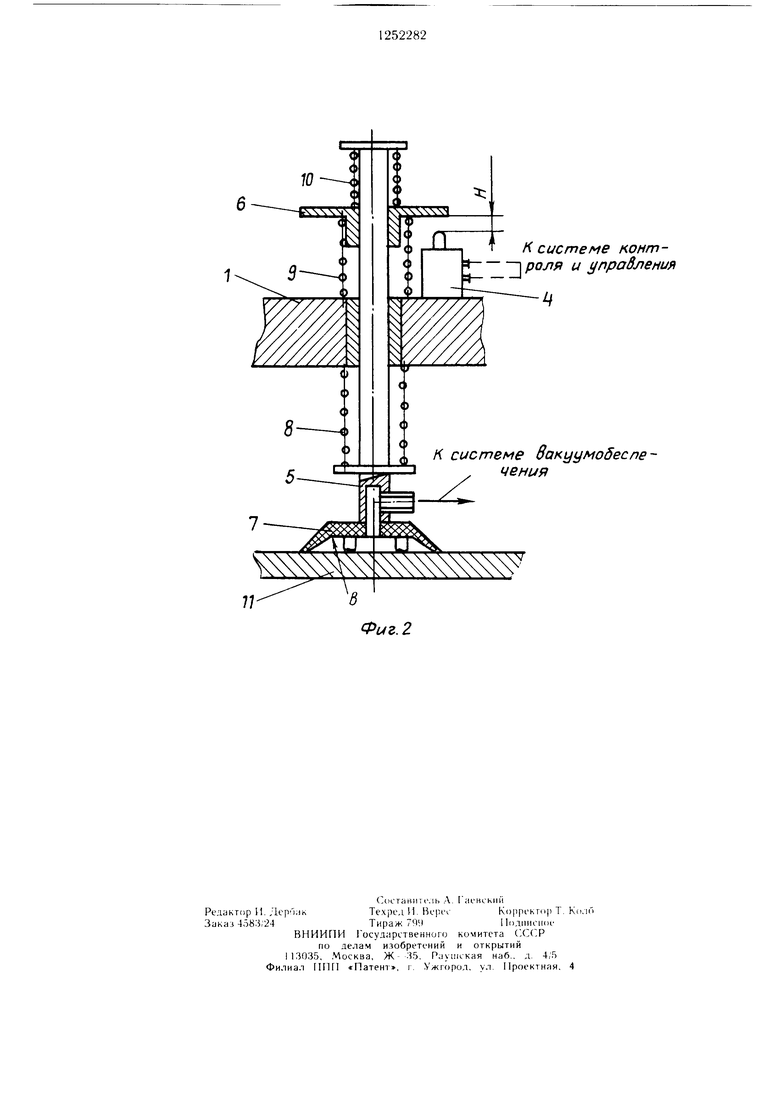
На фиг. 1 схематично изображено yc i ройство. обни1Й вид: на фиг. 2 датчик нагруженности присоса, обншй вид.
Устройсгао содержит навешивае.мую на крюк грузоподп емного механизма -траверсу
1,оснан,енную вакуумными присосами 2, систему 3 вакуумобеспечения, в состав которой входят вакуумный насос, ресивер, коллекторы, система автоматического поддержания пара 4 троь :ia:; ;.i,i li ,ypr;;i;i,i умравлг ния для включения в работу отдельных групп присосок (не показаны), выключагель 4, неподвижно устачог,.1ен1..Й па траг50рс 1, ск : жень 5, свободно перемепгаемый относительно выключателя 4 в направлении, перпендикулярном п.чосК Х --; . |;.отнен) Я Л присоса
2,снабженный полкой 6, вакуумным присосом 7 и комплектом |)жи11 ( 10.
Вакуум-захватчое устройстно )абог;и i следующим образом.
Перед выполнением подъемно гране по )i- ных операпий устройство 1)астр-1 йают, для чего устанавливают расстояние И между головкой в1)1к,1К)чате. 1Н 4 и полкой b С1ерж ня 5, контактируюп1его с новерхностьк за 11 посредством присоса 7.
Расстояние И cran,iii.iH.iaH)i и завии; мости от допустимого значения величины формации нагруженно1ч присоса и от конструктивного И 1(.1ис:,и 1 :1 |дзе . npin oi ;; При наличии пружин 12 сжатия в полвес ках присосов рассюяние И принимаю: с пе том перемещения прУ Кип ог леис. злл ii; грузок. В общем виде Н лН1+дН;, где Л Hi jioHyciiiMoc увеличение В1)1согы присоса в процессе работы (npnniiMjiCicy:. пример, по экспериментальным дан}1ым)-. А На Hcpe.vienieiu.c корпуса присоса oiiiu сительно неподвижна установлечнок пчк вого выключателя под действием нагрузок.
Для pery:iiip(4iKii ьакуум-iaxEsa i Ь ос уст ройство устанавлив ппт га поверуисгпь rpai спортируемого груза 11 с контрольной массой и все рабочие камеры Б присосов 2, а также камеру В присосов 7 с- ержкя 5 сообщают с сис1емой вакуумобеспечения и поднимают r|)y:i. В уюм полижсмни устанавливают в системе вакуумобеспечения заданное значение вакуума, и при уго.м, перемеп1ая полку 6 .)Чlocигeльн сторжчя Г), контактирующего с поверхностью груза И, фиксируют ее в положении срабатывания выключателя 4
После выполнения данных онераций устройство roroHv .i к нормальным ус.юЕншм эксплуатации.
/1,.1я трапспортирования i руза устройство ус1анавливают на его поверх}1ость и рабочие камеры присосов 2 сообщают с системой вакуумобеспечения 3. Присосы 2, включен- ные в работу вследствие ра.1носги давлений воздуха внутри и снаружи камеры, удерживают груз при подъеме и траь1спортировке. 11|;псс)сы, у когчрых ПО кяким-либо причинам наруп1ена герметичность уплотнения камеры с поверхнос1ью транспортируемого
груза 110С1)едством противоположпых клапанов, ВХОДЯН1ИХ в состав системы вакуум- обеспечения, автоматически отключаются от вакуумной системы и в подъеме груза не участвуют. При сообщении присосов 2 с системой вакуумобеспечения 3 автоматически сосбп1аются с системой присосы 7, контак ируюпгие с поверхностью груза, в :) .yi .ia м 1 Г) слрже1:Ь Г) с полкой 6 занимает заданное положение относительно головки выключа |-еля 4. В этом положении
0 1р )h:-,:5O../;т lio.ii.evi ipysa.
В с.|учае перег рузки присосов или при iL vo:)J ,к II Г:1ии параметров вакуума присосы 2 ; 1 фо г 1 Г1У:отся ч. высота увеличивается, в результате чего поверхность трансорти- .)()|() 1 ру la or .одт от траверсы 1 и гоединенно1 0 с ней выключателя 4, умень- 1пается расстояние Н. При достижении ус- гап; ьл(Ч1Н() (. .Ha4eiUi5i П срабатывает выклю- чатепь 4: включает в работу привод ис0 гочника вакуума и выдает соответствующий . ill 1,1 i lo ;Г,.,ьг управ.юиия. Если изменения параметров вакуума пе обеспечивают :1ормалы11,1, условий удержания 1 руза, т.е. зы.Ч) га iipHc ic i 2 вых1|;1ит за пределы допустимых значепий. контакт полки 6 с вы5 члюча.слсм 4 пе ii.ipyinacTCH, си1нал не снимается. ра ст;1тп К)рка груза ч таких условиях, во возбежапие отрыва груза, не про ИЮДП СН
Ь с.мучае подьема груза, масса которого О :оо1ветс1 ayei к(;личес. ву включенных в рабо- гу присосов 2 и их деформапия не превы- inaer допустимых значений, полка 6 с го- .юзкой выключателя 4 не контак ирует, что соответствует условиям нормальной рабо- 1Ы вакуум-захвалного устройства и грузо- i)U,(MH.)io мс ханизма в целом. В этих ус- .товиях производят транспортировку груза. В случае нару1пения каких-либо парамет- ;м.)з I п|)1и:егсе rpaiii портировкп выключа- ie, ib 4 срабатывает, как и в процессе подъема; Q включает ,|)И1И)д источника вакуума и вы- яает пч ;г.. л,т уч;1авленич сигналы.
;Li i разгрузки уст)ОЙС1ва груз опускают, рабочие камеры присосов 2 разобщают с вакуумной системой и сообщают с атмосфе- 5 рой, прп эг)м ав гo :aтичecки сооб|цаются с атмосферой соединенные системой вакуум- обеспечении Г1рисосы 7. Устройство отводится от I pyia
К системе конт- 4 ролр и (/продления
К системе вакуумобеспе чения
Фиг.2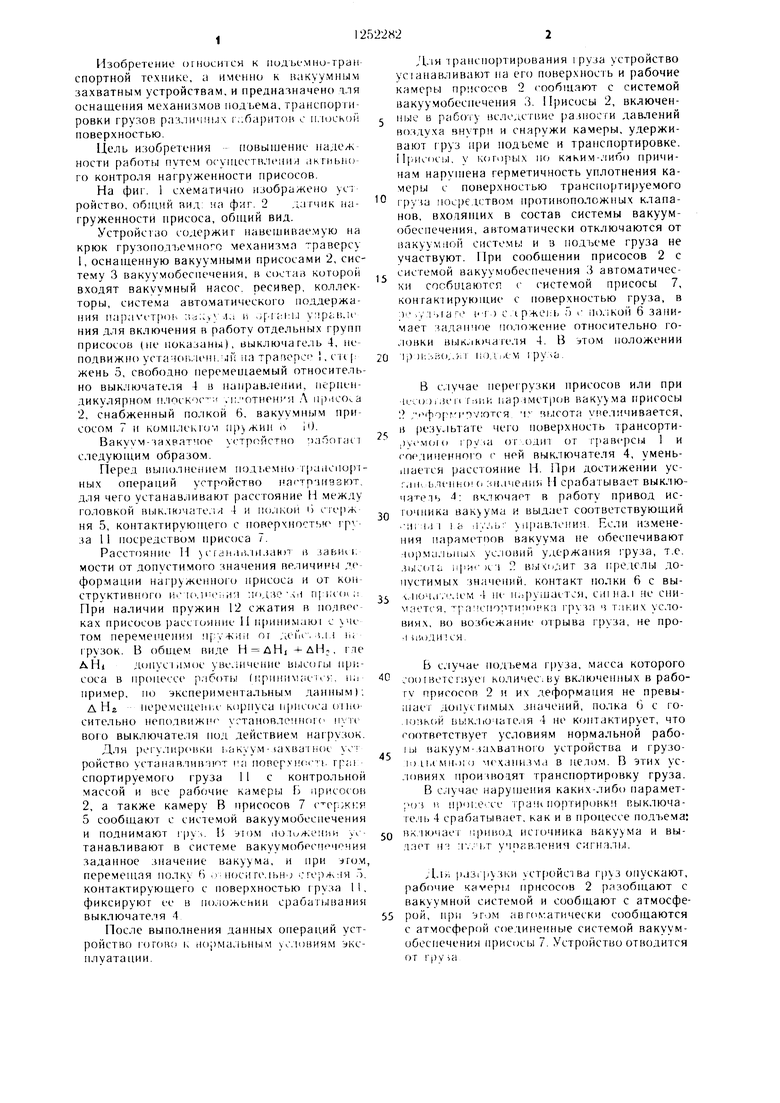
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1983 |
|
SU1209560A1 |
| Способ захвата и транспортирования грузов | 1986 |
|
SU1357222A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1094831A1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Вакуумный захват | 1984 |
|
SU1284930A1 |
| Вакуумный захват | 1986 |
|
SU1393635A1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU1000360A2 |
| Грузозахватное устройство | 1984 |
|
SU1237601A1 |
| Железнодорожный кран | 1951 |
|
SU93734A1 |
| Устройство для укладки штучных предметов | 1973 |
|
SU501015A1 |
| Вакуумное грузозахватное устройство | 1972 |
|
SU538970A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
