1 1
Изобретение относится к подъемно транспортному оборудованию, а именно к устройствам для управления гидроприводом механизмов перемещения рабочих органов кранов.
Цель изобретения - повышение надежности устройства для управления гидроприводом механизма.
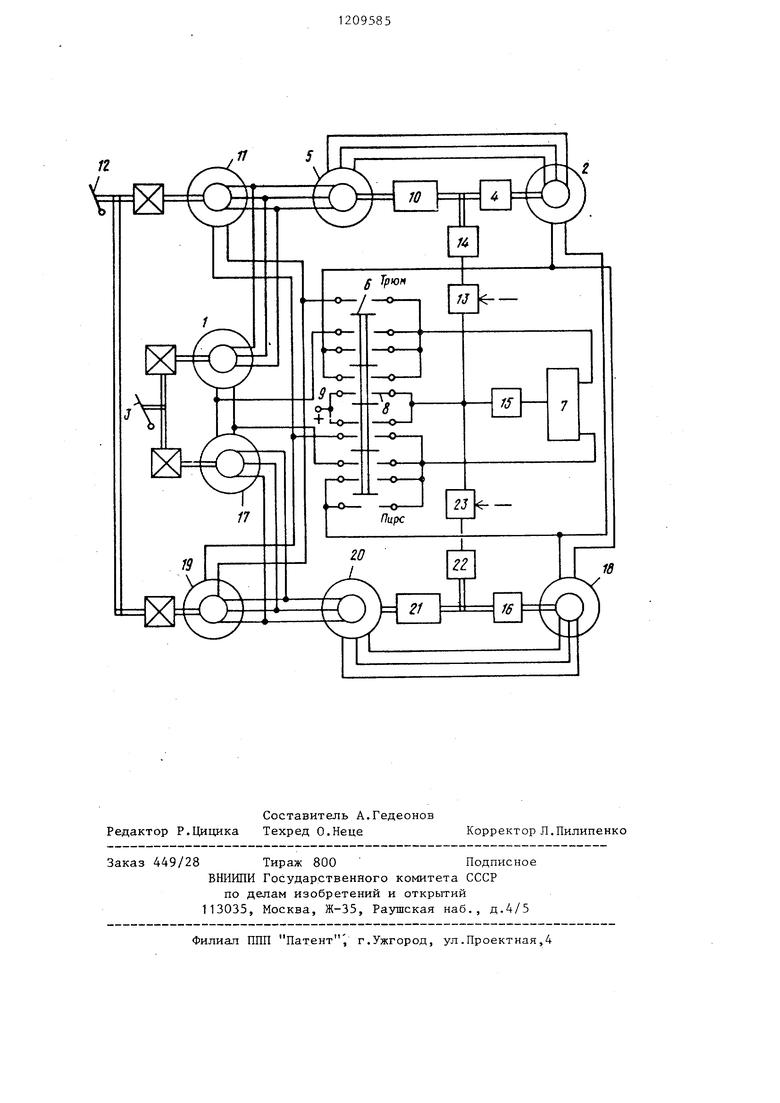
На чертеже представлена принципиальная электрическая схема устройства.
Устройство для управления гидроприводом механизма перемещения рабо- .чего органа крана содержит сельсин- датчики 1 и 2,ротор одного из которых кинематически связан с командо- аппаратом 3, а другого - с рабочим органом 4. Одни обмотки датчиков 1 и 2 соединены с обмотками дифференциального сельсина 5, а другие обмотки через коммутатор 6 подключены к выходам блока 7 экспоненциально нарастающего переменного напряжения, вход которого через ключ 8 управления подключен к источнику Э питания. Ротор сельсина 5 кинематически соединен с регулирующим органом 10. Сельсин-датчик 11 электрически соединен с обмоткой сельсина 5 и блоком 7, а кинематически с командоаппаратом 12. Источник 9 через ключ 8 соединен с блоком 13 управления тормозом 14 механизма. Блок 7 соединен с формирователем 15.
Рабочий орган 4 может быть, например, поворотной платформой крана.
2095852
При наведении стрелы крана на технологическую площадку, например трюм судна или пирс, используется механизм 16 изменения вылета стрелы, 5 устройство управления которого также содержит сельсин-датчики 17-19, дифференциальный сельсин 20, регулирующий орган 21, тормоз 22 и блок 23 управления.
10 Устройство для управления гидроприводом механизма перемещения рабочего органа крана работает следующим образом.
Положение командоаппаратов 3 и 12
15 соответствует координатам механизмов поворота и вьшета стрелы над трюмом или пирсом.При нахождении коммутато- . ра 6 в положении, например, Трюм, подается питание на сельсин-датчики
20 11 и 19 через блок 7, на выходе которого амплитуда переменного напряжения нарастает по экспоненте. Диффе- ренциа-ггьные сельсины 5 в соответствии с сигналом сельсин-датчиков 11 и 19
25 воздействуют на регулирующие органы 10 и 21 гидроприводов, механизмы поворота и вылета стрелы перемещаются до тех пор, пока сигналы обратных связей через сельсин-датчики 2 и 18
30 не вернут роторы сельсинов 5 и 20 в исходное положение, при котором сигнал регулирующих органов 10 и 21 равен нулю, механизмы остановились над трюмом. Аналогично устройство
35 работает при передвижении в сторону пирса.
гг
19 j-
U@
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидропривода лебедок сдвоенного крана | 1989 |
|
SU1784569A1 |
| Устройство управления гидроприводом механизма крана | 1989 |
|
SU1724956A1 |
| Способ управления гидроприводом механизма крана | 1983 |
|
SU1197983A1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901245A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| Устройство управления электроприводом поворота стрелы роторного экскаватора | 1983 |
|
SU1165746A1 |
| Указатель вылета стрелы крана | 1983 |
|
SU1134527A1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| Устройство для синхронизации механизмов передвижения крана | 1984 |
|
SU1253939A1 |
Составитель А.Гедеонов Редактор Р.Цицика Техред О.Неце
449/28 Тираж 800Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ППП Патент , г.Ужгород, ул.Проектная,4
Корректор Л.Пилипенко
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
