Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для синхронизации механизмов передвижения крана.
Цель изобретения - повышение надежности устройства.
На чертеже изображена принципиальная электрическая схема устройства для синхронизации механизмов передвижения крана.
Устройство для синхронизации механизют с упорами 17, расположенными вдоль рельсов 18 крана.
Устройство для синхронизации механизмов передвижения крана работает следующим образом.
При движении крана угловое положение роторов сельсин-датчика 1 и сельсин-приемника соответствует положению соответствующего механизма передвижения крана. При перекосе крана на выходе сельсинмов передвижения крана содержит сельсин- ю приемника 4 появляется сигнал, амплитуда
датчики 1 и 2, одни обмотки которых соединены с блоком 3 питания. Одна обмотка сельсин-приемника 4 через фазочувствитель- ный выпрямитель 5 подключена к управляющему входу привода 6 механизмов передвикоторого соответствует величине перекоса крана, а фаза - направлению перекоса. Этот сигнал через фазочувствительный выпрямитель 5 поступает на управляющий вход привода 6 механизмов передвижения
жения крана. Обмотки одного дифферен- 15 для исключения перекоса крана. В рассмат- циального сельсина 7 электрически соеди- риваемом режиме работы тормоз 13 замкнут, нены с другими обмотками сельсин-датчика 1 и сельсин-приемника 4, роторы которых
кинематически связаны с ходовыми колевремени срабатывания, например, датчика 9 до срабатывания датчика 10 происходит поворот ротора сельсинов 16 и 7 на угол, пропорциональный перекосу крана, при этом
а тормоз 14 разомкнут. При неодновременном взаимодействии датчиков 9 и 10 с упорами 17 блок 15 подключает обмотки сельсами 8 механизмов передвижения крана.„ сина 16 к обмотке сельсина 7 и обмотке
Датчики 9 и 10 контрольных позиций под-сельсин-датчика 2, в результате с момента ключены к управляющим входам блоков 11 и 12 управления механическими тормозами 13 и 14 и к управляющим входам блоков коммутации (блоки коммутации показаны
в виде одного блока 15). Другая обмотка25 тормоз 13 разомкнут, а тормоз 14 замкнут, сельсин-датчика 2 соединена с обмоткойВ случае, если сработает первым датчик 10, другого дифференциального сельсина 16взаимно изменяется подключение обмоток посредством одного блока коммутации,сельсина 16 и с помощью блока 15. а другая обмотка сельсина 16 соединенаТаким образом, устройство позволяет с обмоткой сельсина 7 через другой блокограничить перекос крана и просто коррек- коммутации. Механические тормоза 13 и 1430 тировать неточность положения механизмов кинематически связаны с ротором сельси-передвижения крана, вызванную накоплена 16 и ротором сельсин-датчика 2. Роторынием ощибки за счет неточности изготов- сельсинов 7 и 16 кинематически связаныления или проскальзывания ходовых колес, друг с другом. Датчики 9 и 10 взаимодейству-что повышает надежность устройства.
Составитель А. Гедеонов Техред И. ВересКорректор Л. Патай
Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
ют с упорами 17, расположенными вдоль рельсов 18 крана.
Устройство для синхронизации механизмов передвижения крана работает следующим образом.
При движении крана угловое положение роторов сельсин-датчика 1 и сельсин-приемника соответствует положению соответствующего механизма передвижения крана. При перекосе крана на выходе сельсинкоторого соответствует величине перекоса крана, а фаза - направлению перекоса. Этот сигнал через фазочувствительный выпрямитель 5 поступает на управляющий вход привода 6 механизмов передвижения
для исключения перекоса крана. В рассмат- риваемом режиме работы тормоз 13 замкнут,
времени срабатывания, например, датчика 9 до срабатывания датчика 10 происходит поворот ротора сельсинов 16 и 7 на угол, пропорциональный перекосу крана, при этом
сельсин-датчика 2, в результате с момента
тормоз 13 разомкнут, а тормоз 14 замкнут, В случае, если сработает первым датчик 10, взаимно изменяется подключение обмоток сельсина 16 и с помощью блока 15. Таким образом, устройство позволяет ограничить перекос крана и просто коррек- тировать неточность положения механизмов передвижения крана, вызванную накоплением ощибки за счет неточности изготов- ления или проскальзывания ходовых колес, что повышает надежность устройства.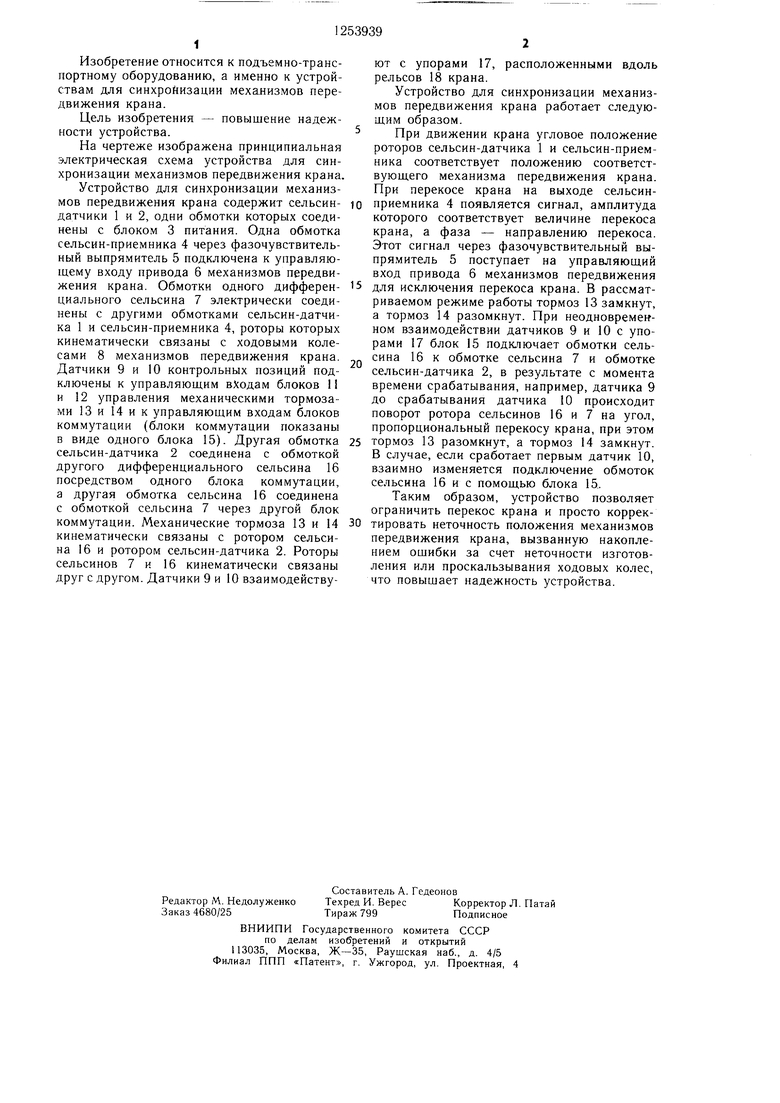
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| Устройство синхронизации механизмов передвижения крана | 1973 |
|
SU483337A1 |
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| Устройство для синхронизации механизмов передвижения опор крана | 1982 |
|
SU1039856A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU286916A1 |
| Устройство для дистанционной установки нулевого положения сельсинной передачи | 1983 |
|
SU1103278A1 |
| Система управления гидропривода лебедок сдвоенного крана | 1989 |
|
SU1784569A1 |
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| Устройство синхронизации механизмов передвижения крана | 1978 |
|
SU680978A1 |

| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
