Изобретение относится к средствам автоматизации горных машин на открытых разработках месторождений полезных ископаемых и предназначено для автоматического регулирования. скорости поворота стрелы роторного экскаватора. Известно задающее устройство для электроприводов поворотных механизмов роторных экскаваторов с неподвижной стрелой, содержащее блок магнитных усилителей и сельсинj который связан с механизмом поворота роторного экскаватора и включен в цепь обратной связи блока магнитных усилителей. С целью получения постоянства производительности экскаватора в процессе реза, устройство регулирует ско рость поворота стрелы ротора по законугде Ufl - значение скорости noBoiioTa при совпадении оси роторной стрелы с направлением подачи экскаватора; 06 -угол между осью стрелы ротора и направлением подачи Q . . Недостатками даного устройства являются большая погрешность в формировании устройством заданного закона из-за нелинейности характеристики магнитного усилителя, работающего на обмотку сельсина, кинематически свя занного с механизмом поворота роторн го экскаватора, а также из-за низкой устойчивости в койтуре обратной связи двухтактного магнитного усилителя необходимость в установке дополнит«льных контактов для изменения полярности сигнала задания приводу поворота, так как устройство работает с однополярным напряжением постояиного тока. Кроме того, устройство обладает низкой эксплутационной надежностью изза сложности схемы. Наиболее близким к изобретению по технической сущности и достигавмому результату является устройство .управления электроприводом поворота стрелы роторного экскаватора, содержащее блок коррекции скорости и кома доаппарат, выполненный на сельсине, выходы командоаппарата соединеш с входами фазочувствительНого выпрями,теля 21, Недостатками известного устройст ва являются низкая надежность,обус-озленная высокой сложностью схемы, и необходимость в использовании дополнительных контактов для реверсирования сигнала задания. Цель изобретения - повьшение надежности и упрощение устройства. Поставленная цель достигается тем, что устройство управления элек-. троприводом поворота стрелы роторного экскаватора, содержащие блок коррекции скорости и командоаппарат соединены с входами фазочуствительного выпрямителя, снабжено датчиком положения роторной стрелы, двумя потенциометрами, которые подключены паралельно выходам фазочуствнтельно- . го выпрямителя, а подвижные контакты потенциометров соединены - первый через размыкающий, а второй через замыкающий контакты датчика положения роторной стрелы - с одним из входов электропривода поворота стрелы, другой вход которого соединён непосредственно с одним из входов фазочуствительного выпрямителя, при этом в блок коррекции скорости введены третий потенциометр и размыкающий контакт датчика положения роторной стрелы, при этом третий потенциометр одним концом первичной обмотки, а другим - с вторичной обмоткой сельсин-датчика, другой конец первичной обмотки сельсин- датчика через размыкающий контакт датчика положения роторной стрелы соединен с другим концом третьего потенциометра, подвижный контакт которого подключен к одному из контактов первичной обмотки сель сина командоаппаратал другой конец которого соединен с другим концом вторичной обмотки сельсин-датчика блока коррекции скорости.. На фиг.1 изображена схема устройства управления электроприводом :поворота стрелы роторного экскаватора} на фиг. 2 - закон регулирования скорости поворота стрелы ротора, реализуемый блоком коррекции скоррсти, а именно: а - требуемый закон О cos
3
где V(j значение скорости поворота /при совпадении оси роторной стрелы с направлением подачи экскаватора; вб -угол между осью стрелы ротора и направлением подачи,
б - реализуемьш закон
Лчов- о а-Ьсобоб).
;.- Устройство содержит блок 1 коррекции скорости, имеющий последовательно встречно включенные источник 2 напряжения переменного тока, например потенциометр, и вторичную обмотку сельсин-датчика 3 угла поворота об стрелы ротора экскаватора. Ротор сельсин-датчика 3 кинематически связан с механизмом поворота стрелы ротора. Выход блока 1 коррекции скорости со.единен с входом командоаппарата 4, например сельсина, трехфазная обмотка которого подключена к входу фазочуствительного выпрямителя 5 . Выход последнего через потенциометры 6 и 7 и контакты 8 атчикЬ положения роторной стрелы соединен с входом привода 9 поворота стрелы (датчик положения роторной стрелы не показан).
Устройство работает следукмцям образом.
Напряжение переменного тока подается на вход потенциометра 2 и через замыкающий контакт 8 датчика на однофазную обмотку, сельсин-датчика 3 угла поворота стрелы ротора.
Ротор сельсин-датчика 3. установлен таким образом, что при совмещении оси стрелы ротора с направлением подачи экскаватора (jL 0) на вторичной обмотке сельсина 3 возникает максимальное напряжение Ul , т,е, сельсин-датчиком 3 реализуется зависимость
l), U, С0506 . . .
Из выходного напряжения потенциометра 2 Llj вычитается напряжение вторичной обмотки сельсин-датчика 3
и, и эта разность I U, Ui-U,,Co6e(.
подается на однофазную обмотку сельсинного командоаппарата А« Напряжение вторичной обмотки сельсинного
57464
командоаппарата 4, пропорционапьг нре углу поворота командоаппарата 4, подается Wa вход фaзoчyctвительного выпрямителя 5 и после г выпрямления через потенциометр 6 и контакт 8датчика -на входпривода 9поворота стрелы ротора. Скорость инаправление вращения двигателей noBOpoia электропривода зависят от угла пово10 рота командоаппарата 4 и угла поворота «6 стрелы ротора.
Таким образом, устройство реализует следующую зависимость скорост ти поворота
.
пов о а-Ьсозсо),
где а и в - безра.змерные коэффициенты, зависящие.от положения потенциометров 2 и 6,
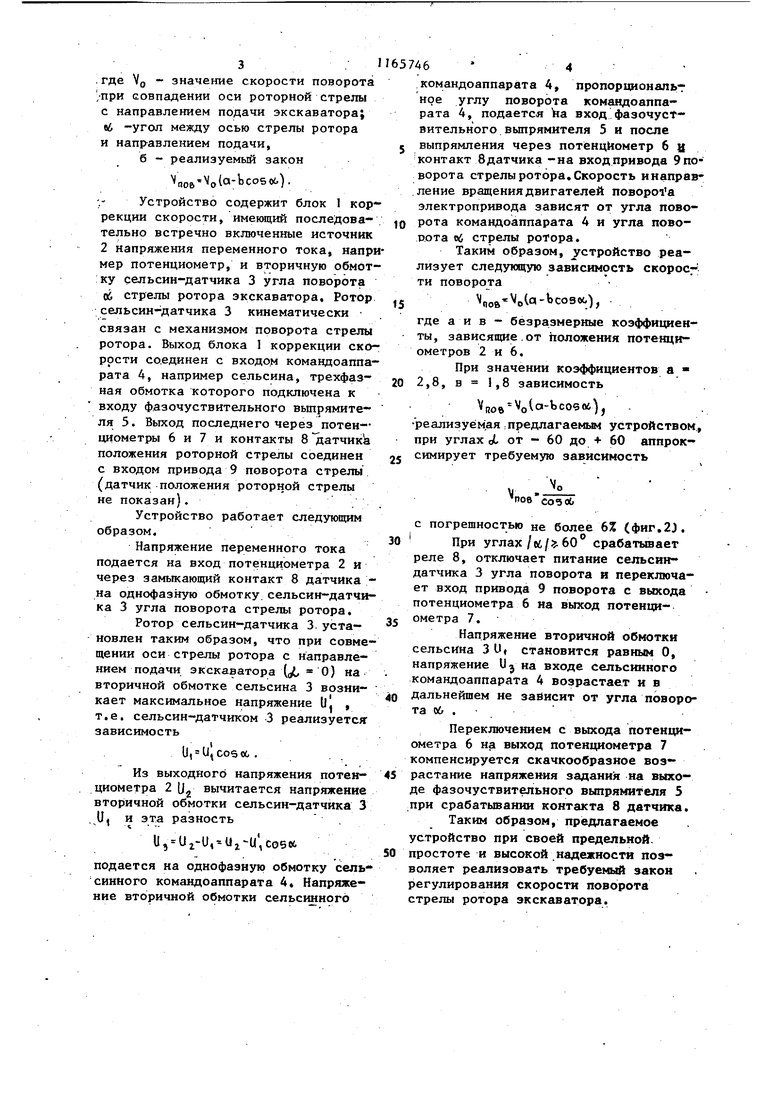
При значении коэффициентов а 2,8, в ,8 зависимость
Vnoe o a-bcosoi),
реализуемая,предлагаемым устройством., при углах (JL от - 60 до + 60 аппроксимирует требуемую зависимость
V .А
пов С0906
с погрешностью не более 6% (фиг.23, При углах/et/ 60 срабатывает реле 8, отключает питание сельсиндатчика 3 угла поворота и переключает вход привода 9 поворота с выхода потенциометра 6 на выход потеициометра 7,
Напряжение вторичной обмотки сельсина 3 U, становится равным О, напряжение U j на входе сельсинного командоаппарата 4 возрастает ив дальнейшем не зависит от угла поворота об .
Переключением с выхода потенциометра 6 на выход потенциометра 7 компенсируется скачкообразное воз-
растание напряжения задания на выходе фазочуствительного выпрямителя 5 ,при срабатывании контакта 8 датчика,
Таким образом, предлагаемое устройство при своей предельной.
простоте и высокой .надежности позволяет реализовать требуемый закон регулирования скорости поворота стрелы ротора экскаватора.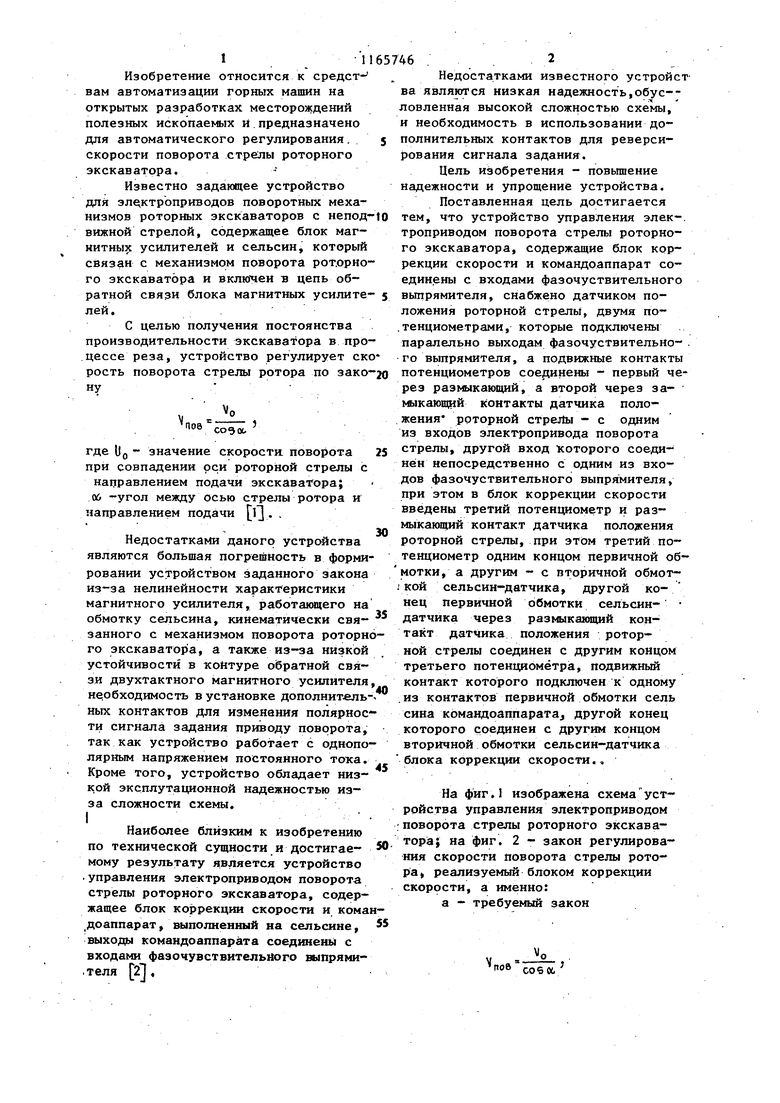
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Устройство для управления электроприводом поворота стрелы роторного экскаватора | 1978 |
|
SU685770A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для измерения в роторных экскаваторах толщины стружки | 1959 |
|
SU133412A1 |
| Устройство управления приводом кантователя блюминга | 1978 |
|
SU772630A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВО,! РОТОРНОГО ЭКСКАВАТОРА.ИТЕЛЬНОСТИ | 1971 |
|
SU306355A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU288339A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА СТРЕЛЫ РОТОРНОГО ЭКСКАВАТОРА, содержащее блок коррекции скорости и командоап парат, выполненный на сельсине, выходы командоаппарата соединены с входами фазочувствительного выпрямителя, отличающееся тем, что, с целью повышения надежности и упрощения устройства, оно снабжено датчиком положения роторной стрелы, двумяпотенциометрами, которые подключены параллельно выходам фазочустrefir-,-vv Г V.--. внтельного выпрямители, а подвижные контакты потенциометров соединены первый через размыкающий, а второй через замыкающий контакты датчика . положения роторной стрелы - с одним из входов электропривода поворота . стрелы, другой вход которого соединен непосредственно с одним из входов фазочуствительного выпрямителя, при этом в блок коррекции скорости введены третий потенциометр и размыкающий контакт датчика положения роторной стрелыi при этом третий потенциометр одним концом соединен с одним концом первичной обмотки, а другим - с вторичной обмоткой сельсин-датчика, другой конец первичной сл обмотки сельсин-датчика через размыкающий контакт датчика положения роторной стрелы соединен с другим кондом третьего потенциометра, подвижный контакт которого подключен к одному из кон-тактов первичной обмотки сельсина командоаппарата, другой конец котдрого соединен с другим концом вторичной э :л обмотки сельсингдатчика блока коррекции скорости. sl 4i 
:si
-W-IS0
-W -45
n l eoa,epai
Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Научно-технический сборник | |||
| Сер | |||
| Электропривод | |||
| Вып | |||
| J | |||
