« 1
Изобретение относится к подъемно- т анспортному-машиностроению в частности, к грузоподъемным устройствам.
Цель изобретения - повышение грузоподъемности и расширение зоны обслуживания ,
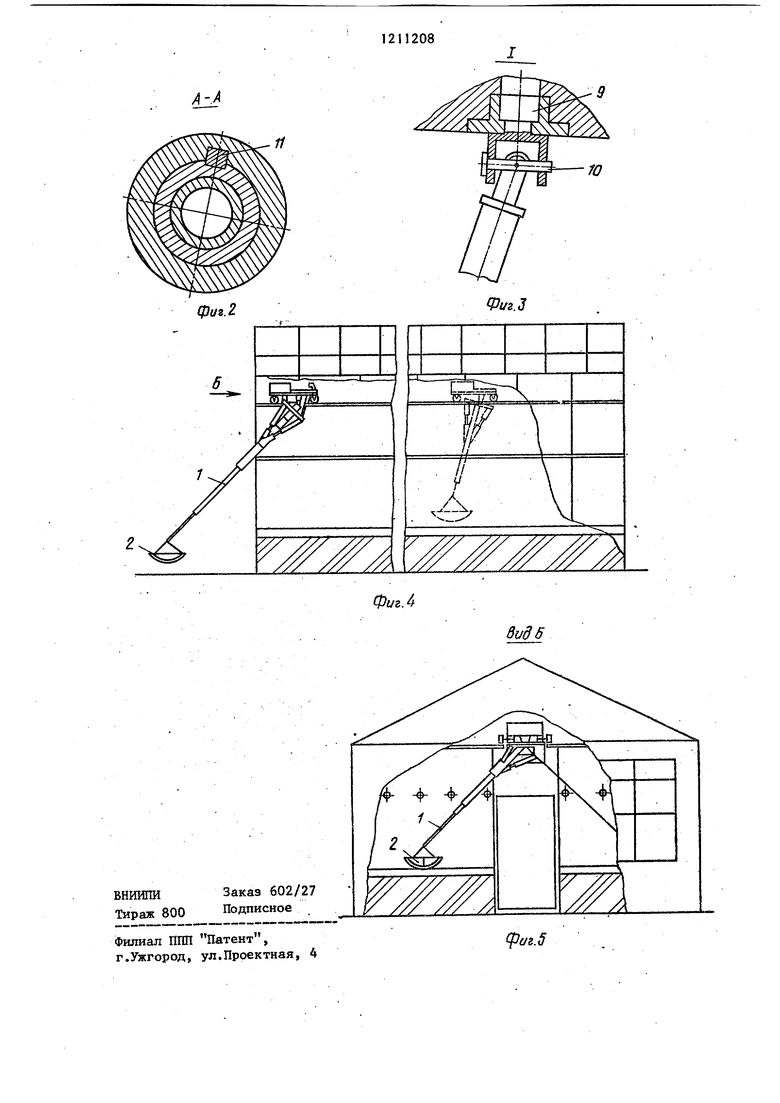
На фиг.1 изображено грузоподъемное устройство, общий вид; на фиг.2- разрез А-А на фиг.1; на фиг.З - узел 1 на фиг.1; на фиг.4 - расположение грузоподъемного устройства в тепли-, це; на фиг.З - вид Б на фиг.4.
Грузоподъемное устройство обслуживает закрытые помещения типа теплиц . Грузоподъемное устройство содержит шарнирно соединенную с основанием стрелу 1 с грузозахватным органом 2 на конце.
Стрела 1 взаимодействует посредством ползуна 3 со штокоми гидроцилиндров 4. Основание представляет со бой подвижную каретку 5. На каретке ,5 шарнирно закреплен корпус дополнительного гидроцилиндра 6, шток которого шарнирно соединен с одной стороной рамы 7, противоположная сторона которой шарнирно закреплена на каретке 5. Рама 7 охватьшает стрелу 1 и установлена с возможностью пере мвщег-шя относительно нее. На раме 7 шарнирно закреплены корпуса гидроцилиндров 4, Каретка 5 смонтирована с возможностью перемещения по направ ляющим 8, закрепленным на потоке теп лиц (фиг.4 и 5). Стрела 1 выполнена в виде телескопического цилиндра (фнг.1) , закрепленного на каретке 5 с обеспечением двух степеней свободы например поворотным штырем 9 с перпендикулярной осью 10 (фиг.З) или по средством соединения типа шарнира Гука. Для исключения поворота ползуна 3 предусмотрен стопор мБзкду ним и стрелой 1, например шпонка 11 (фиг.2).
Ось вращения рамы 7 на каретке 5 смещена в продольном направлении. Смещение шарниров гидроцилиндров 4 относительно стрелы 1 для одновремен ного изменения величины и расположения зоны обслуживания стрелой неодинаковое.
Работа грузоподъемного устройства осуществляется следующим образом:
112082
Дпя выполнения операций каретку 5 перемещают по направляющим в требуемую зону. При возможности непосредственного доступа в рабочую зону ра5 му 7 разворачивают против часовой стрелки для обеспечения минимального вылета стрелы 1, после чего возможен ее круговой разворот совместной работой гидроцилиндров 4, устанавливаю10 щих ее в требуемое .положение/(фиг. I точки а). Дпя подъема грузозахватного органа, например грайфера, используют телескопическое устройство самой стрелы. При зтом грузоподъемное
15 устройство используется в режиме, близком к мостовому крану.
При наличии над рабочей зоной ка- кого-лнбо технологического оборудования фиг.5) каретку 5 смешают в
20 сторону, раму 7 разворачивают по часовой стрелке и вьщвигают телескопическое устройство стрелы. При зтом грузоподъемное устройство используется в режиме, близком к стреловому
25 крану, обеспечивая выполнение работ в зоне, уд аленной от оси вращения стрелы,
Окончательное выделение стрелы 1 в требуемое положение обеспечивается
30 гидроцилиндрами 4, переметающими ее в пределах угла cf (фиг.1), уменьшенного вследствие смещения в процессе поворота рамы 7 с гидроцилиндрами 4 за счет скольжения ползуна 3 jr по стреле 1 в сторону от оси вращения стрелы. При этом плечо равнодействующей -сил от гидроцилиндров 4, приложенных к стреле, увеличивается, что компенсирует возрастание грузодр вого момента от рабочей нагрузки на грузозахватном органе. После подъема груза стрелой 1 с помощью гидроцилиндров 4 на некоторую высоту и перемещения каретки 5 по направляю-
., щнм 8 длина стрелы может быть
уменьшена механизмом с телескопического выдвижения (фиг.1 точки а.
Для работы вне теплицы, например выгрузки заменяемого грунта, карет- 50 У смещают к требуемому краю и манипулируй цилиндрами совместно с рамой 7 и механизмом телескопического выдвижения стрелы 1 обеспечивают обслуживание требуемой зоны, напри,д мер загрузку транспортного средства.
А-А
ФигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Погрузчик | 1986 |
|
SU1493608A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| Устройство для загрузки и выгрузкишТучНыХ гРузОВ из КРыТыХ жЕлЕзНОдО-РОжНыХ ВАгОНОВ | 1978 |
|
SU819021A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ПОГРУЗЧИК ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ВАГОНОВ | 1993 |
|
RU2092429C1 |
| НАВЕСНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАМЕНЫ ПОГЛОЩАЮЩЕГО АППАРАТА ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2003 |
|
RU2253579C1 |

ВНИИПИ Заказ 602/27 Тираж 800
Филиал ППП Патент, г.Ужгород, ул.Проектная, А
fpat.5
| Грузоподъемный кран | 1976 |
|
SU600078A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
