2. Автооператор по п. 1, о т - личающийся тем, что, с целью повьшения равномерности распределения усилия захвата, он снабжен зажимными губками с уста: , ( . .
Изобретение Ьтносйт ся-к машиностроению, а имеяНб к автооператорам, предназначенным для автоматизации технологических процессов, в частности для нанесения покрытий на поверхности изделий методом окунания изделий в покровное вещество.
Целью изобретения является улучшение функциональных свойств за счет повышения качества покрытия и повы- шеяие равномерности распределения усилия захвата,
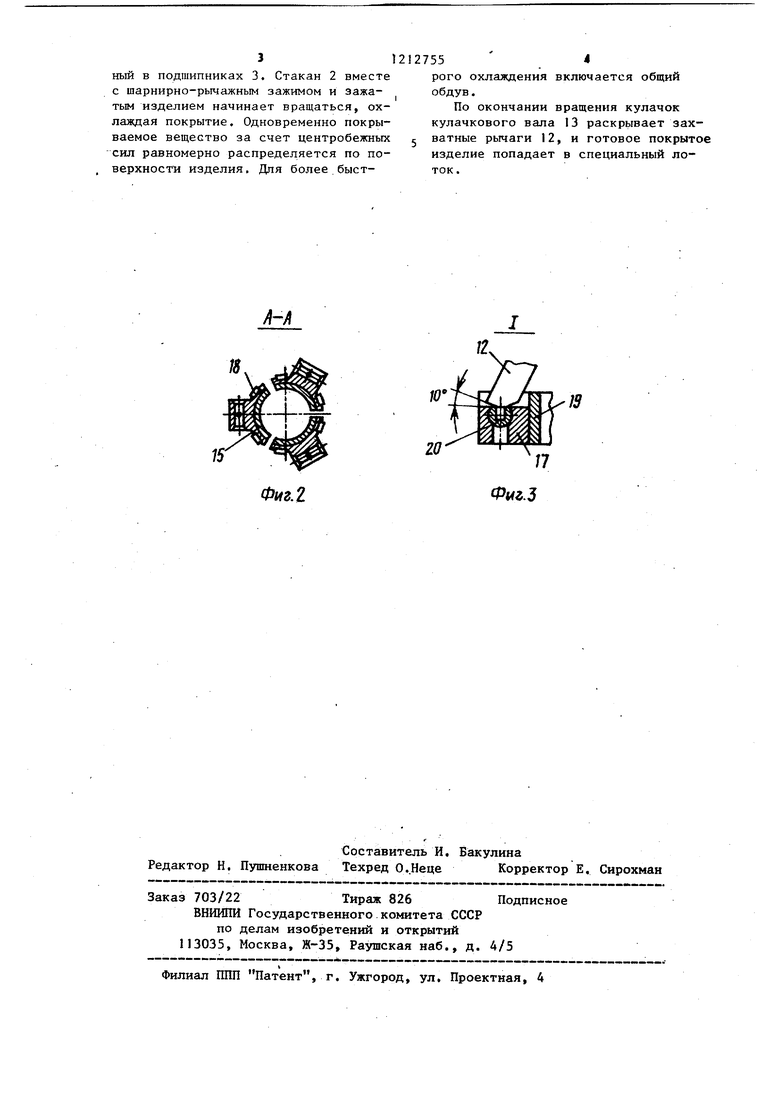
На фиг. 1 изображен автооператор, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - узел 1 на фиг. 1
Автооператор содержит корпус I, в котором установлен стакан 2 с возможностью его вращения в подшипниках 3. На стакане 2, в его верхней части закреплен шкив 4, кинематически свя- ванный с приводом (не показан) посредством гибкой связи 5. В полости стакана 2 расположен подпружиненный толкатель, выполненный составным из двух штанг 6 и 7, стянутых гайками .8. Усилие зажима пружины 9 регулиру- ется гайками 10 посредством втулки П.
В выемках стакана 2 шарнирно установлены захватные рычаги 12. При этом один конец толкателя установлен с возможностью взаимодействия с захватными рычагами 12, а другой конец - кинематически связан с приводом его продольного перемещения (не показан) посредством кулачкового вала 13.
В корпусе 1 и стакане 2 вьшолнены к аналы 14, а в нижней части стакана 2 закреплен раструб 15, при зтом каналы обеспечивают возможность соединения полости, ограниченной раструбом 15 с источником рабочего агента (не показан). В корпусе 1 укрепле кронштейн с трубопроводом 16 для общего
1212755.
новленными на них при помощи упругих элементов сменными рабочими элементами, при этом зажимные губки при помощи сферических шарниров связаны с захватными рычагами.
обдува изделия. На зажимных губках 17 установлены при помощи упругих элементов, например пружин 18, сменные рабочие элементы 19. Захватные рьиаги 12, опорные поверхности которых вьтолнены с уклоном , при помощи сферических шарниров 20 связаны с зажимными губками 17. Автооператор смонтирован на ползуне траверсы, являющейся составной частью устройства, для нанесения покрытия на изделия. На ползуне установлено 8 автооператоров, работающих одновременно.
Автооператор работает следующим образом,
Толкатель под действием соответствующего кулачка кулачкового вала 13, работающего от привода продольного перемещения толкателя, давит на захватные рычаги 12 шарнирно- рычажного захвата, заставляя их раскрыться и освободить изделие.
Изделие проходит процесс покрытия и возвращается в раскрытый захват автооператора. По каналам 14, имеющимся в корпусе 1. и стакане 2, подается воздух, направляемый раструбом 15 на покрытие изделия. Происходит поверхностное охлаждение верхней части изделия. Затем кулачковый вал 1.3 освобождает толкатель, захват закрывается, зажимая покрытое изделие.
При этом зажимные губки 17 совместно со сменными рабочими элементами .19, благодаря их щарнирному соединению с захватными рычагами 12 и вьшолнению уклонов на опорных поверхностях последних, устанавливаютс по покрытому изделию, плотно прилега к его поверхности. Включается привод осуществляющий движение вращения от электродвигателя через шкив 4 с гибкой связью 5 на стакан 2, установленс шарнирно-рычажным зажимом и зажатым изделием начинает вращаться, охлаждая покрытие, Одновременно покрываемое вещество за счет центробежных сил равномерно распределяется по поверхности изделия, Для более.быстобдув.
По окончании вращения кулачок кулачкового вала 13 раскрывает захватные рычаги 12, и готовое покрытое изделие попадает в специальный лоток .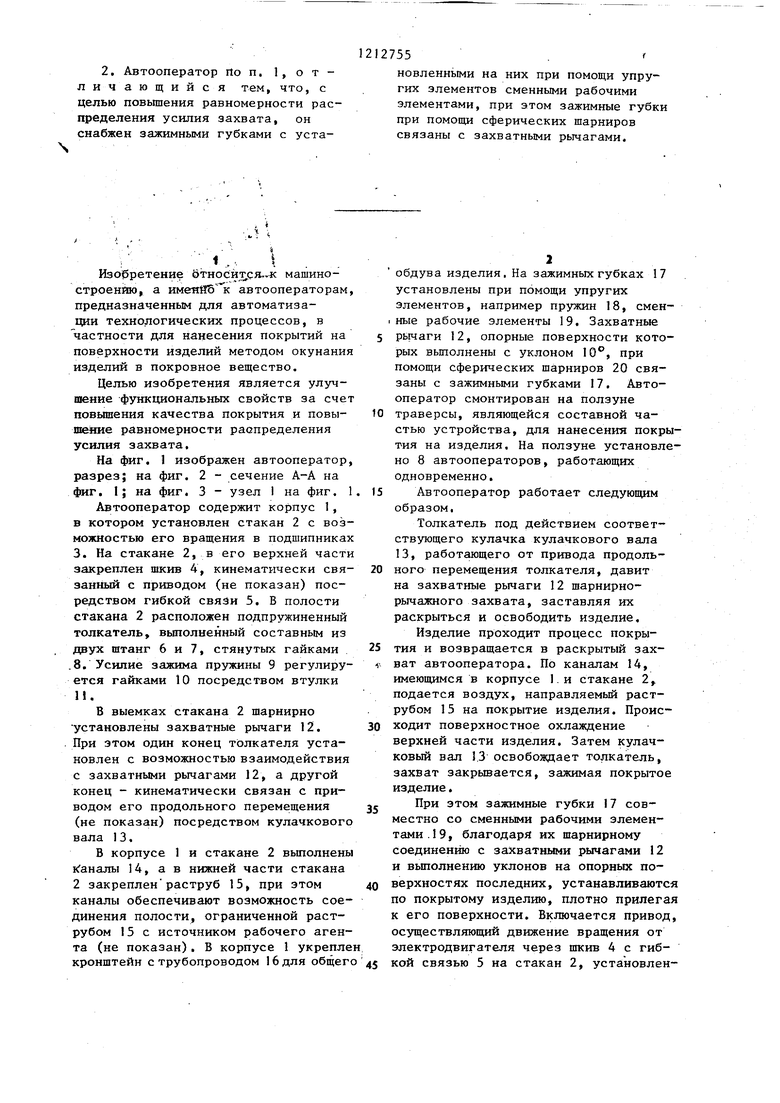
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU772809A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Захват для автоматической смены инструментальных оправок | 1978 |
|
SU703300A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Захват манипулятора | 1979 |
|
SU837855A1 |
| Захват автооператора | 1982 |
|
SU1052366A1 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| Рычажно-клещевой захват для закрепления образцов при испытании на растяжение | 1985 |
|
SU1257450A1 |

А-А
Фиг.2
Фчг.З
| Устройство для нанесения покрытия на изделиях методом окунания | 1974 |
|
SU542565A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
