2. Головка по п. 1, отличающая с я Тем, что, с целью повьвяения точности обработки, реечный механизм выполнен в виде шестерни и двух контактирующих с ней противоположно расположенных относительно оси шестерни зубчатых реек, одна из которых закреплена на основании, другая - на каретке, причем ось шестерни установлена на дополнительном цилиндре перемещения основания,.
I
Изобретение относится к станкостроению и может быть использовано в агрегатных станках и автоматических линиях.
Целью изобретения является расши рение технологических возможностей путем выполнения копировально-фре- зерных работ при сохранении малых габаритов .
Поставленная цель достигается тем, что при быстром перемещении основание движется вперед по направляющим вместе с кареткой, а при рабочей подаче основание продолжает двигаться вперед, а каретка с ко- пиром - назад по освободившемуся участку направляющих. Кроме того, конструкция головки предусматривает величину копира в 2 раза большую, чем изделие, что позволяет повысить точность обработки, так как погрешность изготовления копира оказывает меньшее влияние на обрабатываемую деталь.
На фиг. 1 схематически изображена фрезерная головка, разрез; на фиг.2 сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 сечение В-В на фиг. 1; на фиг. 5 сечение Г-Г на фиг. 3; на фиг. 6 - схема работы головки и процесса копирования.
Головка (фиг. 1) включает корпус 1, установленный на основания 2 с возможностью поворота относительно оси 3. Основание 2 установлено на направляющих салазок 4 с возможность продольного возвратно-поступательног перемещения. В передней части корпуса J установлен шпиндельный узел 5
143А1
а пиноль и шпиндель расположены в корпусе таким образом, что расстояние от оси пиноли до оси поворота корпуса.равно удвоенному расстоянию от оси поворота корпуса до оси шпинделя .
3. Головка по п. 1, отличающаяся тем, что механизм фиксации дополнительного силовогр цилиндра выполнен в виде клиньев с приводом их перемещения.
с фрезой 6, приводимой во вращение от привода главного движения (не показан).
В задней части корпуса 1 размещена пиноль 7. с управляемые копирным коническим пальцем 8. Шпиндель 5 с фрезой 6 и пиноль 7 с копирным пальцем 8 разнесены в разные стороны от оси 3 корпуса 1. Расстояние от оси фрезы 6 до оси 3 корпуса J в 2 раза меньше расстояния от оси копир- ного пальца 8 до оси 3. Копир 9 (фиг. 2 и 6) и планка 10 являются направляющими для копирного пальца 8 и ограничивают угол поворо та корпуса 1 относительно оси 3.
Копир 9 и планка 10 неподвиж ,но установлены на каретке 1 1, ;которая может перемещаться по направляющим салазок 4. Контур копира 9 вы лолнен в 2 раза больше контура обрабатываемой детали.
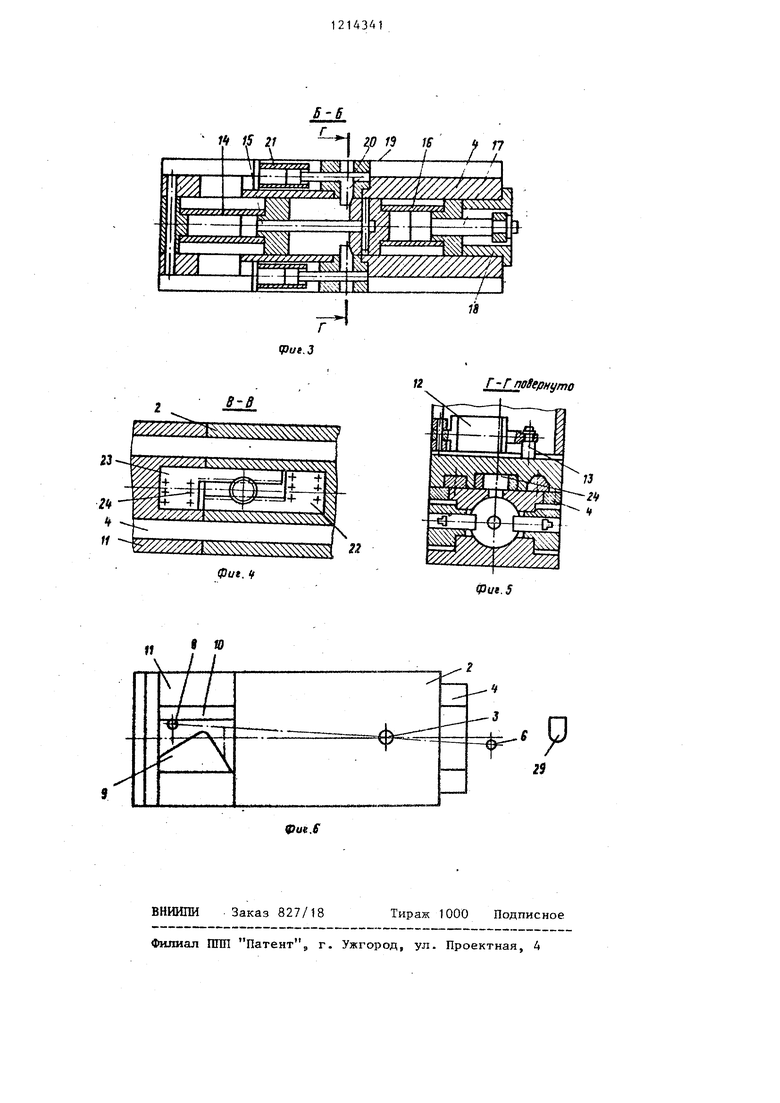
Для обеспечения поворота корпуса относительно основания 2 в корпусе 1 шарнирно установлен силовой цилиндр 12, шток 13 которого шарнирно соединен с основанием 2.
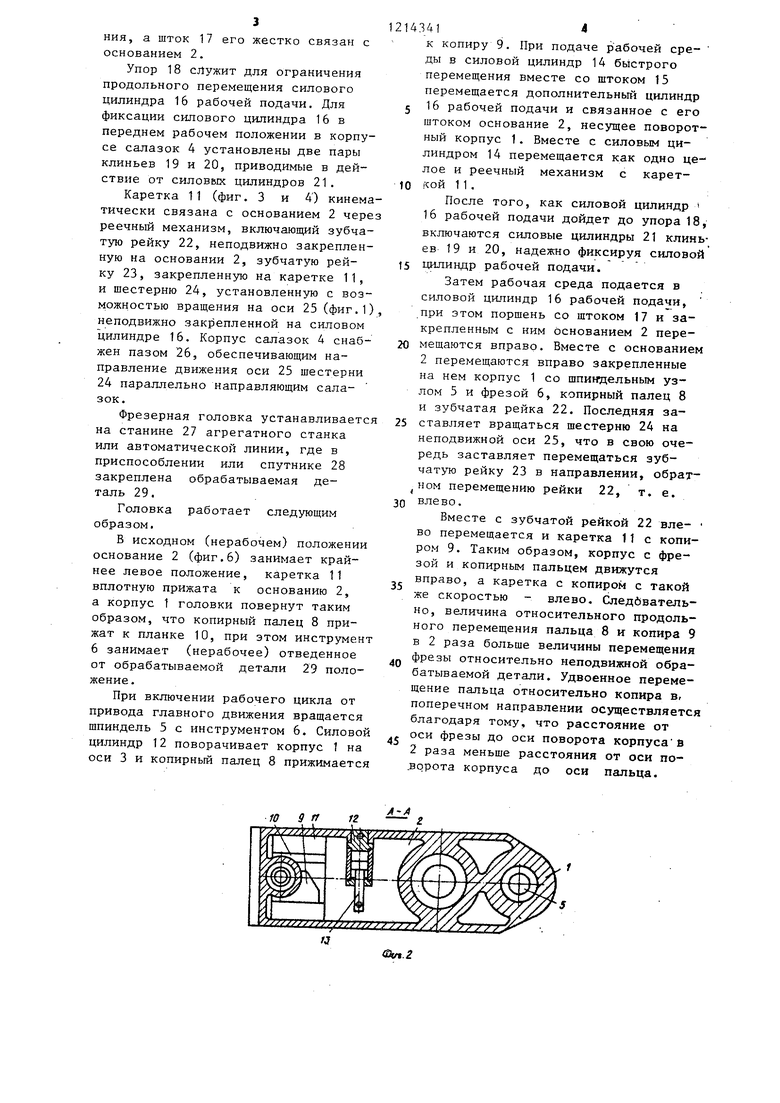
Для обеспечения быстрого поступательного перемещения основания 2 относительно салазок 4 в корпусе последних неподвижно установлен силовой цилиндр 14 привода быстрых перемещений (фиг.5), шток 15 которого соединен с дополнительным силовым
цилиндром 16 привода рабочей подачи инструмента.
Силовой цилиндр 16 установлен в расточке корпуса салазок 4 с воз- -можностью поступательного перемеще3
ния, а шток 17 его жестко связан с основанием 2.
Упор 18 служит для ограничения продольного перемещения силового цилиндра 16 рабочей подачи. Для фиксации силового цилиндра 16 в переднем рабочем положении в корпусе салазок 4 установлены две пары клиньев 19 и 20, приводимые в действие от силовых цилиндров 21.
Каретка 11 (фиг. 3 и 4) кинематически связана с основанием 2 чере реечный механизм, включающий зубчатую рейку 22, неподвижно закрепленную на основании 2, зубчатую рейку 23, закрепленную на каретке 11, и шестерню 24, установленную с возможностью вращения на оси 25 (фиг.1) неподвижно закрепленной на силовом цилиндре 16. Корпус салазок 4 снабжен пазом 26, обеспечивающим направление движения оси 25 шестерни 24 параллельно направляющим салазок.
Фрезерная головка устанавливаетс на станине 27 агрегатного станка или автоматической линии, где в приспособлении или спутнике 28 закреплена обрабатываемая деталь 29.
Головка работает следующим образом.
В исходном (нерабочем) положении основание 2 (фиг.6) занимает крайнее левое положение, каретка 11 вплотную прижата к основанию 2, а корпус 1 головки повернут таким образом, что копирный палец 8 прижат к планке 10, при этом инструмен 6 занимает (нерабочее) отведенное от обрабатываемой детали 29 положение.
При включении рабочего цикла от привода главного движения вращается щпиндель 5 с инструментом 6. Силово цилиндр 12 поворачивает корпус 1 на оси 3 и копирный палец 8 прижимаетс
14341
к копиру 9. При подаче р абочей среды в силовой цилиндр 14 быстрого перемещения вместе со штоком 15 перемещается дополнительный цилиндр 5 16 рабочей подачи и связанное с его штоком основание 2, несущее поворотный корпус 1. Вместе с силовым цилиндром 14 перемещается как одно це-- лое и реечный механизм с каретtO 11.:
После того, как силовой циЛиндр 16 рабочей подачи дойдет до упора 18, включаются силовые цилиндры 21 клиньев 19 и 20, надежно фиксируя силовой
t5 цилиндр рабочей подачи.
Затем рабочая среда подается в силовой цилиндр 16 рабочей подачи, при этом поршень со щтоком 17 и закрепленным с ним основанием 2 пере20 мешаются вправо. Вместе с основанием 2 перемещаются вправо закрепленные на нем корпус 1 со шпиндельным узлом 5 и фрезой 6, копирный палец В и зубчатая рейка 22. Последняя за25 ставляет вращаться шестерню 24 на неподвижной оси 25, что в свою очередь заставляет перемещаться зубчатую рейку 23 в направлении, обрат- ном перемещению рейки 22, т. е.
30 влево.
Вместе с зубчатой рейкой 22 вле- во перемещается и каретка 11 с копиром 9. Таким образом, корпус с фрезой и копирным пальцем движутся вправо, а каретка с копиром с такой же скоростью - влево. Следбватель- но, величина относительного продольного перемещения пальца 8 и копира 9 в 2 раза больше величины перемещения
р фрезы относительно неподвижной обрабатываемой детали. Удвоенное перемещение пальца относительно копира в, поперечном направлении осуществляется благодаря тому, что расстояние от , оси фрезы до оси поворота корпуса и 2 раза меньше расстояния от оси по- .ворота корпуса до оси пальца.
35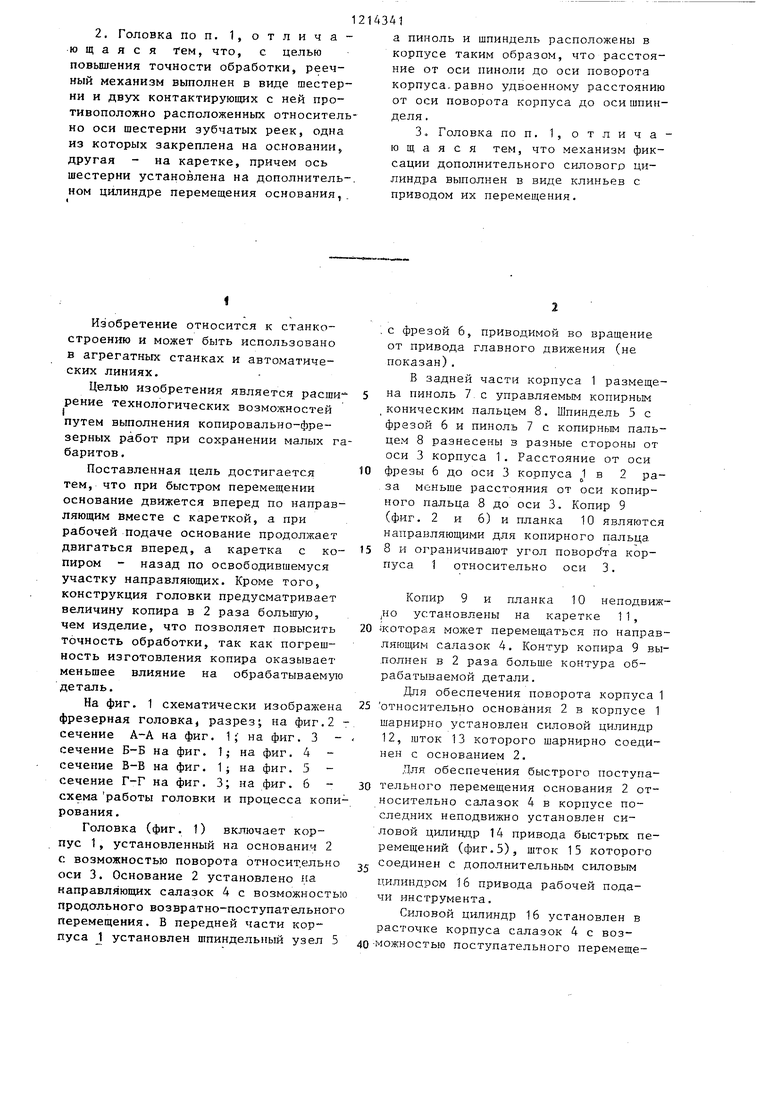
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовая головка | 1978 |
|
SU719814A1 |
| Силовая головка | 1978 |
|
SU878431A2 |
| Фрезерная головка | 1982 |
|
SU998002A1 |
| Силовая головка | 1978 |
|
SU878430A2 |
| Полуавтомат для заточки многолезвийного инструмента с прямыми и винтовыми стружечными канавками | 1968 |
|
SU300047A1 |
| Станок для обработки концов труб | 1982 |
|
SU1065088A1 |
| Устройство для обработки криволинейных пазов | 1985 |
|
SU1311860A1 |
| ШПИНДЕЛЬНАЯ ГОЛОВКА ДЛЯ КОНУСНО ЭЛЛИПСНОЙОБТОЧКИ | 1965 |
|
SU174490A1 |
| Многошпиндельная головка | 1990 |
|
SU1756028A1 |
| Копировально-фрезерный станок | 1976 |
|
SU650809A1 |

fj f /7
/«
fpue.3
2JLA.
23фу«. с
:: jwSepnymo
29
| Фрезерная головка | 1982 |
|
SU998002A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
