1
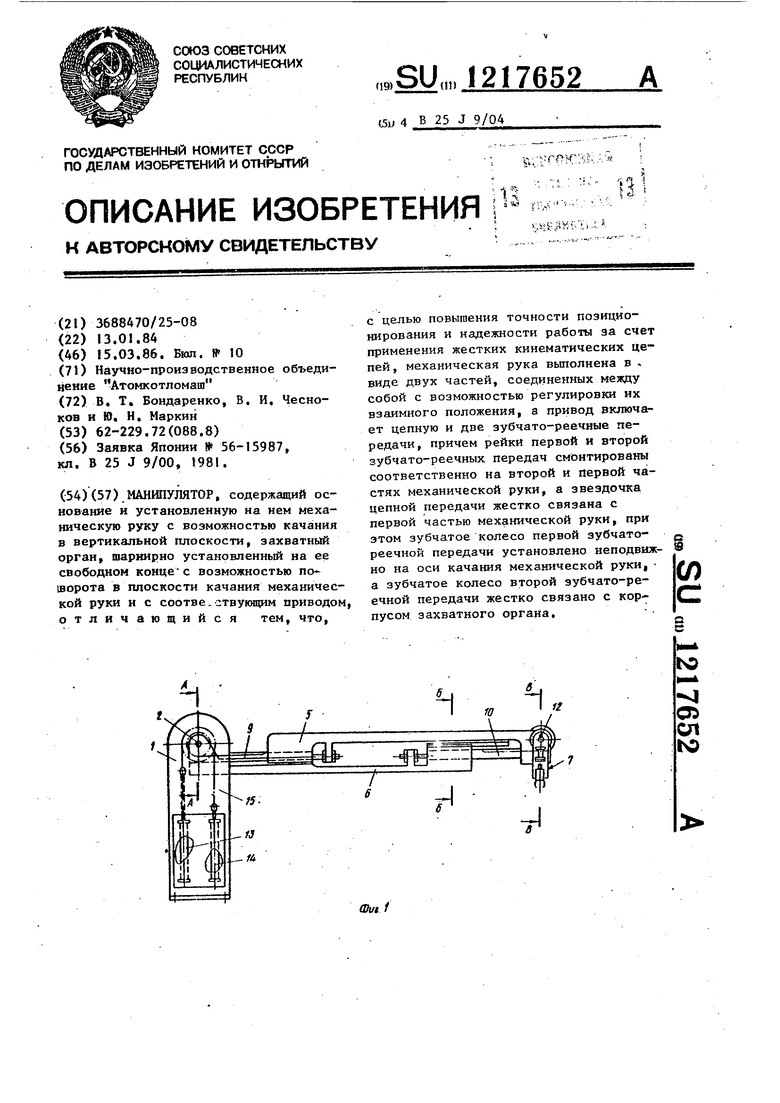
Изобретение относится к средствам автоматизации металлообрабатывающего производства и может найти широкое применение в различных отраслях машиностроения для межоперационных перемещений обрабатьшаемых изделий, в частности в энергомашиностроении для передачи фасонных заготок например после поперечно-клиновой прокатки, в рабочую зону пресса.
Цель изобретения - повышение точности позиционирования и надежности работы за счет применения жестких кинематических цепей и расширения . технологических возможностей за счет обеспечения увеличения зоны обслужи- в ания.
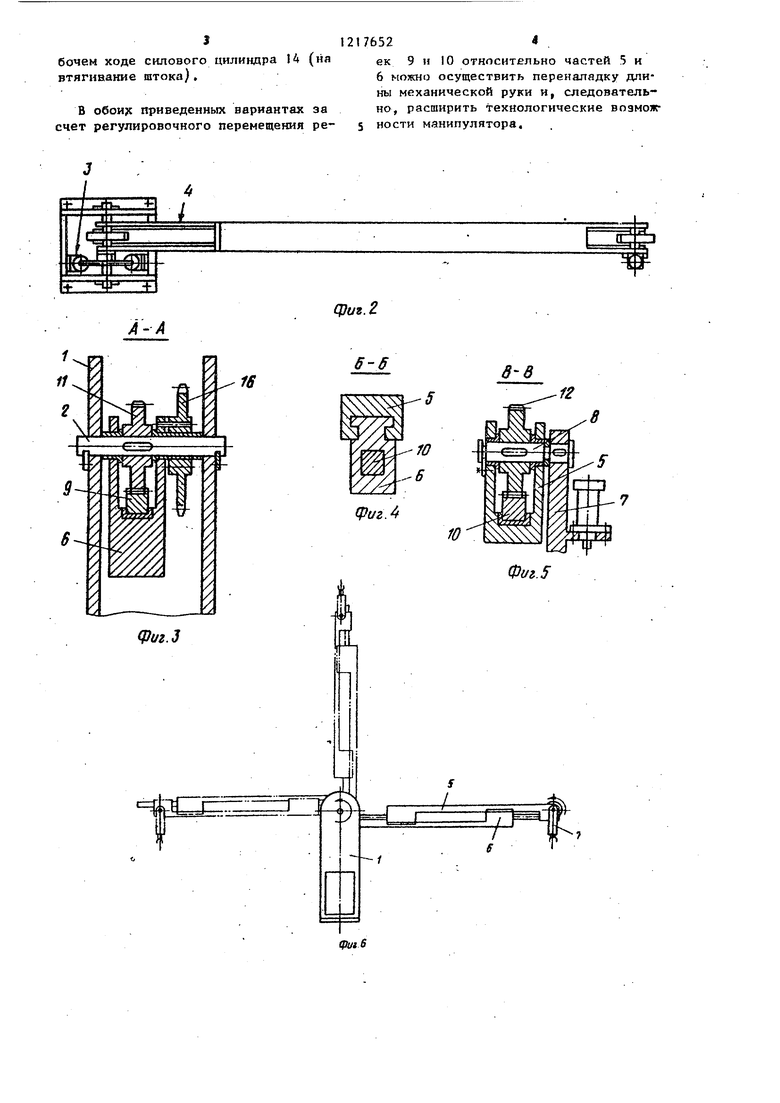
На фиг, 1 изображен манипул: тор, общий ВИД} на фиг, 2 - то же, вид сверху; на фиг, 3 - разрез А-А на фиг, I; на фиг. 4 - разрез Б-В на фиг. 1; .на фиг, 5 - разрез В-В на фиг, f; на фиг, 6 - положение захватного органа в различных позициях механической руки; на фиг, 7 - манипулятор с зубчатым колесом, размещенным под рейкой, общий вид; на фиг. 8 разрез на фиг, 7} на фиг, 9 - положение аахват лого органа в различных позициях механической руки для варианта с зубчатым колесом размещенным под рейкой.
Манипулятор содержит опорную колонну 1,.в верхней части которой на оси 2 с возможностью вращения от привода 3 установлена механическая рука 4. Пос.аедння представляет собой телескопическую консоль, состоящую из двух частей 5 и 6, одна из которые снабжена захватным органом 7 поворотно установленным на оси 8, которая кинематически связана с приводом 3 качания консоли.
Кинематическая связь захватного органа 7 представляет собой две зуб- чг.то-реечные передачи, рейки 9 и 10 которых размещены соответственно в частях 5 и 6 консоли с возможностью регулировочного перемещения. Контактирующие с рейками 9 и 10 зубчатые колеса. П и 12 размещены над ними, причем одно из зубчатых колес (П) жестко связано с осью 2 качания консоли, а другое 12 жестко связано с осью 8 поворота захватного органа 7, При этом зубчатое колесо 12 может быть размещено под рейкой 10.
176522
Привод 3 качания консоли вокруг оси 2 осуществляется цилиндрами I3 и 14, жестко укрепленными на опорной колонне посредством цепи 15 и эвеэ- 5 дочки 16,- поворотно смонтированной на оси 2 и жестко связанной с частью 6 механической руки.
Манипулятор работает следующим образом,
О в исходном положении (фиг. 1) изделие закрепляется в схвате захватного органа 7,
Включением силового цилиндра 13 на рабочий ход (на втягивание штока) 15 звездочка 16 под действием цепи 15 поворачивается совместно с частью механической руки вокруг оси 2 (против часовой стрелки), при этом рейка
9обкатывается вокруг неподвижного 20 зубчатого колеса 11 и расстояние
между осью 2 качания и осью 8 поворота захватного органа 7 начинает уменьшаться. Так как рейка 9 жестко закреплена в части 5, то последняя так 25 е получает перемещение влево относительно части 6 вместе с зубчатым ко-Г: лесом 12, которое катится по рейке 10, жестко закрепленной в части 6 и
поворачивает ось 8 совместно с захватным органом 7 также против часовой стрелки. При равенстве делительных окружностей зубчатых колес П и 12 угол качания механической руки 4 будет равен углу поворота захватного 35 орга на 7 вокруг оси 8. При расположении зубчатого колеса 12 под рейкой
10(фиг,. 7 и 8) работа манипулятора осуществляется аналогично, но при этом захватный орган 7 будет повора чиваться по часовой стрелке (фиг, 9)
Таким образом.транспортируемое изделие перемещается в одном и том же положении из позиции захвата в позицию загрузки на последующую обработку
в узкой производственной зоне с од- новре:менным приближением захватного органа 7 к оси качания механической руки, что позволяет обслуживать манипулятором технологическое оборудо50 вание, расположенное на разном расстоянии от оси качания механической руки, зто резко сокращает производственную площадь в зоне действия манипулятора,
55 Поворот механической руки 4 в обратном направлении fno часовой стрел- ке осуществляется в последовательности, аналогичной описанной, при ра30
бочем ходе силового цилиндра 14 втягивание штока).
В обои приведенных вариантах счет регулировочного перемещения
-А
q}ut.Z
ек 9 н 10 относительно частей 5 и 6 можно осуществить переналадку длины механической руки и, следовательно, расширить технологические возмож- ности манипулятора.
6-6
8
Ри.7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор | 1979 |
|
SU804171A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| Манипулятор | 1978 |
|
SU795937A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |

Редактор М, Петрова
Фю 8
Составитель А, Ширяева
Техред М.Пароцай Корректор А. Тяско
Заказ 1048/20 Тираж 1030 Подписное ВННИПИ Государственного комитета СССР
по делим изобретений и открытий 113035, Москва, Ж-35. Раушская наб,, д. 4/5
Филиал ППП Патент, г, Ужгород, ул. Проектная, 4
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
