Ж
Изобретение относится к устройствам для перемещения заготовок между позициями обрабатывающей машины, преимущественно пресса.
Цель изобретения - расширение технологических возможностей путем обеспечения кантования заготовки на 180 на любой позиции обрабатывающей машины.
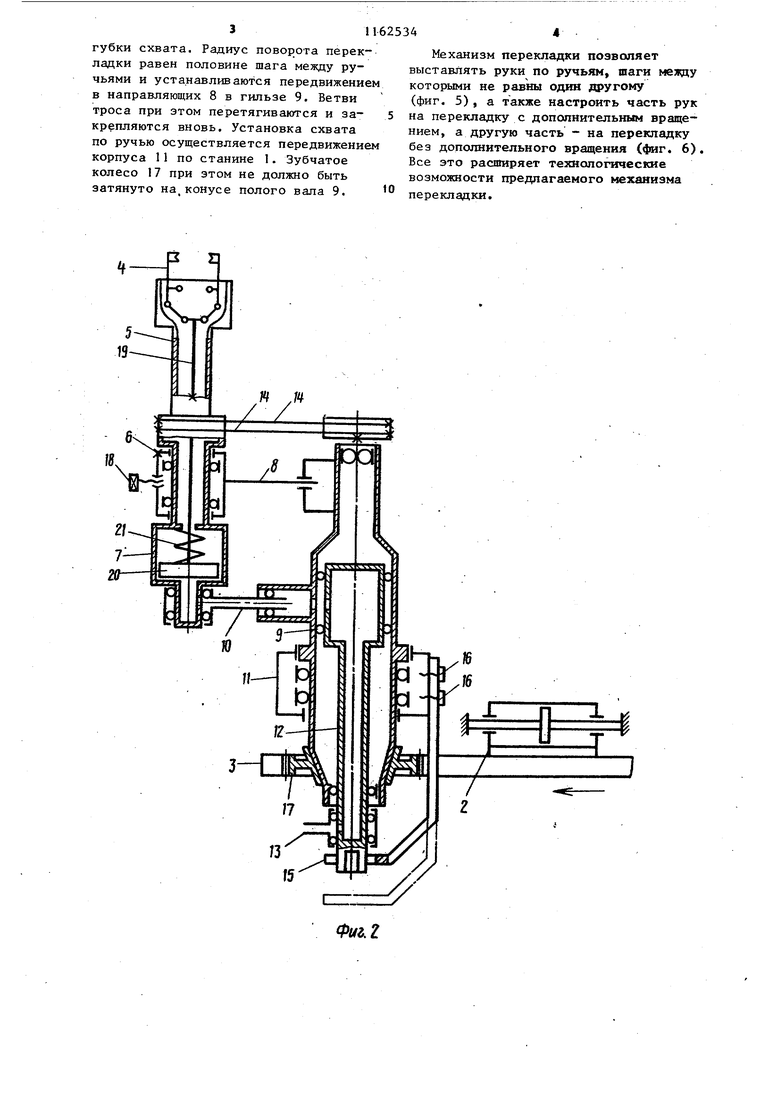
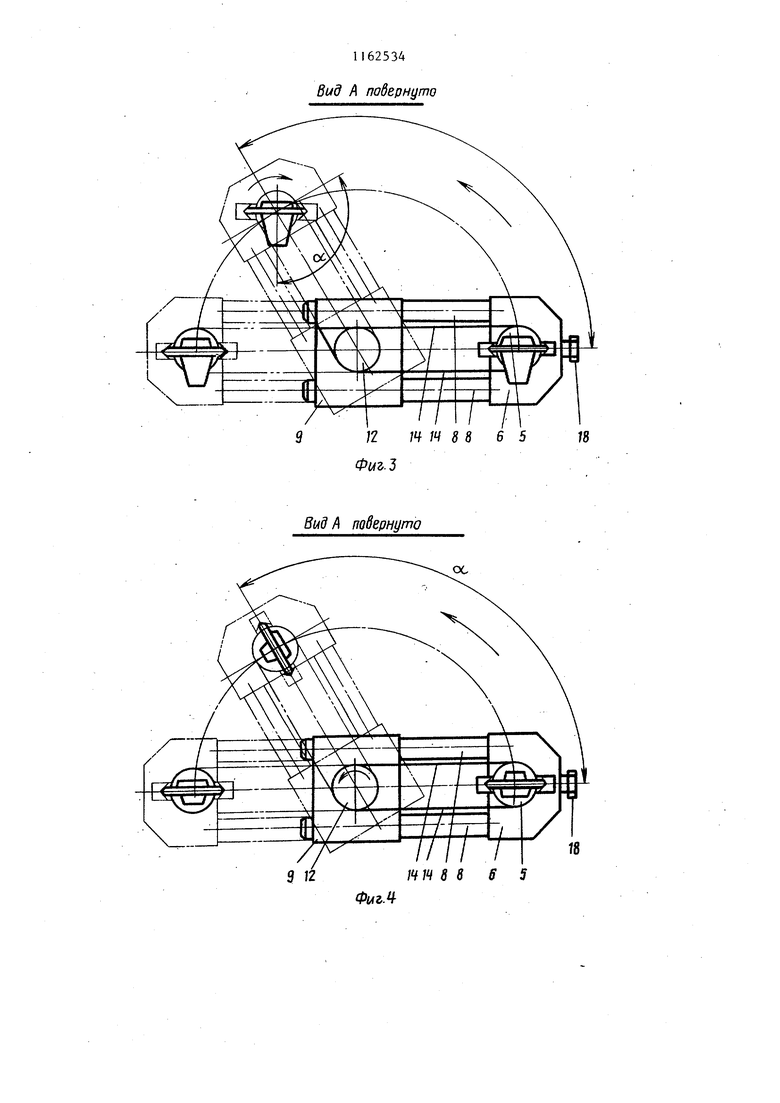
На фиг. 1 изображен механизм перекладки, вид в планер на фиг. 2 кинематическая схема руки с приводом поворота; на фиг. 3 - вид А на фиг. Хсхема поворота схвата с дополнительным вращением); на фиг. А то же, без дополнительного вращениякантование; на фиг. 5 - схема перекладки заготовок в ручьях штампа с.различными шагами между ручьями и с дополнительным вращением схвата на фиг. 6 - то же, с однаковыми шагами между ручьями без дополнительнго вращения и с дополнительным вращенем; на фиг. 7 - вид Б на фиг. 1.
Механизм перекладки состоит из станины 1, привода вращения рук, состоящего из цневмоцилиндра 2, установленного под станиной 1, рейки
3,установленной на пневмоцилиндре 2, трех рук, установленных на станине 1, каждая из которых (фиг. 2) включает в себя захватный орган
4,установленный на валу 5, который установлен в корпусе 6. На валу 5 установлен пневмоцилиндр 7 зажима захватного органа. Корпус 6 крепится на направляющих 8, которые установлены на гильзе 9. Пневмоцилиндр 7 связан через вращающееся телескопическое уплотнительное соединение 10 с гильзой 9. Гильза 9 установлена в корпусе 11, которым рука крепится к станине 1. Внутри гильзы установлен вал 12, на котором установлено вращающееся уплотнительное соединение 13. Вал 12 связан кинематически с валом 5 тросами 14
и удерживается от поворота вилкой 15, закрепленной на корпусе 11 винтами 16. На гильзе 9 на конической шейке установлено зубчатое колесо 17 входящее в зацепление с рейкой 3. В корпусе 6 установлен фиксирующий винт 18. Захватный орган 4 соединен штоком 19 с поршнем 20 пневмодипиндра 7. На штоке 19 установлена пружина сжатия 21. Привод вращения рук закрыт кожухом 22. Механизм перекладки входит в состав фронтального манипулятора и устанавливается на механизме вьздвижения и подъема (не показан).
5 Перекладка поворотом может быть осуществлена двумя способами: с допол нительным вращением схвата и без дополнительного вращения схвата. Работает механизм перекладки с
0 доцолнительным вращением схвата (фиг. 2 и 3) следующим образом.
Пневмоцилиндр 2 с закрепленной на Нем рейкой 3 перемещается по стрелке влево на фиг. 2. При этом входящее
S в зацепление зубчатое колесо 17 каждой руки с рейкой передает крутящий момент через затянутое коническое соединение на гильзу 9, поворачивая его. Вместе с ним поворачиваются на-
0 правляющие 8 и укрепленный на них корпус 6. Вал 12 при этом удерживается от вращения вилкой 15. Фиксирующий винт 18 вывернут из вала 5, который может теперь поворачиваться
5 в корпусе 6. При повороте гильзы 9 вокруг вала 12 одна ветвь троса 14 набегает на неподвижный вал 12, а другая сбегает с него, поворачивая тем самым вал 5 с установленным на
0 нем схватом 4 на угол d. , равный по величине углу поворота гильзы 9, но с обратным направлением вращения. . Таким образом , деталь в схвате в процессе ее перекладки из ручья в ручей
5 занимает всегда одно и то же положение по отношению к плоскости
пазъема штампа.
Без дополнительного вращения схвата механизм перекладки работает слеQ дующим образом (фиг. 2 и 4),
Винт 18 вводится в тело ва- : ла 5 и препятствует его враще- нию относительно корпуса 6, а вилка 16 выводится из зацепления с валом 12, давая возможность ему поворачиваться. При повороте гильзы 9 вал 5 неподвижен относительно корпуса 6 и трос 14 вращает вал 12 внутри гильзы 9 в ту же сторону. Деталь в процессе перекладки из ручья в ручей кантуется.
Воздух в пневмоцилиндр 7 схвата поступает через вращающееся уплотнительное соединение 13, вал 12, гильзу 9, вращающееся телескопическое соединение 10 под поршень 20, который через шток 19 сжимает губки схвата 4. Когда сжатого воздуха под поршнем 20 нет, то пружина 21 разжимает 3 губки схвата. Радиус поворота перек ладки равен половине шага между ручьями и устанавливаются передвижени в направляющих 8 в гильзе 9. Ветви троса при этом перетягиваются и закрепляются вновь. Установка схвата по ручью осуществляется передвижени корпуса 11 по станине 1. Зубчатое колесо 17 при этом не должно быть затянуто на,конусе полого вала 9. 4 Механизм перекладки позволяет выставлять руки по ручьям, шаги меящу которыми не равны один другому (фиг. 5), а также настроить часть рук на перекладку с дополнительным вращением, а другую часть - на перекладку без дополнительного вращения (фиг. 6), Все это расширяет технологические возможности предлагаемого механизма перекладки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1986 |
|
SU1366265A2 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Механизм шагового перемещения | 1985 |
|
SU1263494A1 |

УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ЗАГОТОВОК МЕЖДУ ПОЗИЦИЯМИ ОБРАБАТЫВАЮЩЕЙ МАШИНЫ, содержащее механические руки, в корпусе каждой из которых смонтирован силовой цилиндр, на корпусе которого установлен захватный орган, соединенный со штоком силового цилиндра и смонтированный на основании, привод перемещения механических рук, соединенный с последними реечно-шестеренчаBCffO G3HI5 П 10 п.,А BIUIOTEVA той передачей, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено гильзами по числу силовых цилиндров, каждая гильза смонтирована параллельно силовому цилиндру на основании с возможностью поворота относительно него и взаимодействия с реечно-шестеренчатой передачей привода перемещения механических рук и оснащена размещенным внутри нее соосно поворотным валом со шкивом и связанным с основанием стопором поворота вала, а каждый корпус си§ лового цилиндра снабжен шкивом, . соединенным гибкой кинематической (Л связью со шкивом поворотного вала гильзы, и установлен с возможностью поворота относительно корпуса механических рук, при этом калуцай корпус механических рук установлен на гильзе и снабжен стопором поворота силового цилиндра.
Вид Л подернуто
Вид А повернуто
9 12W W в в ff 5
ос
1111 1
Т8
ФигЛ
/
0uz.5
Фиг.6
ВидБ
±в12/5
ФигЛ
| Атрошенко А | |||
| П | |||
| Механизация и автоматизация горячей штамповки | |||
| М..-Л., Машиностроение, 1965, с | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
