Предлагаемое изобретение относится к области машиностроения, в частности к конструкции автооператоров-манипуляторов для автоматизированной загрузки и выгрузки заготовок и изделий типа втулок или колец при механической обработке, сборке и контроле в условиях автоматизированного и роботизированного производств. В частности изобретение может быть использовано при автоматизации вспомогательных переходов (например, на круглошлифовальном станке мод. ВТ 3М 153Е).
Известно большое число схем и конструкций автооператоров для загрузки-выгрузки деталей типа тел вращения, содержащих механические руки с захватными устройствами, механизмы их перемещения и поворота, снабженные автономными силовыми приводами (например, см. Козырев Ю.Г. Промышленные роботы. Справочник. - М.: Машиностроение, 1983, табл.1, стр.50-51).
Недостатком известных манипуляторов-автооператоров является большое количество элементов и сложность управления манипулятором, что снижает надежность их использования.
Наиболее близким к заявляемому объекту по технической сущности и достигаемому эффекту является конструкция манипулятора, представляющего собой механическую руку, содержащую основание, установленную на нем направляющую, кривошипно-ползунный механизм, закрепленный на направляющей, и привод, вал которого связан с кривошипом, а ползун установлен на направляющей и связан с захватным устройством (А.с. СССР № 1229039, В 25 J 18/02, 1983 г.).
Недостатком этой конструкции являются ограниченные эксплуатационные возможности манипулятора, а именно жесткое закрепление корпуса с направляющей на основании, что не позволяет осуществлять его поворот, отсутствие разгрузчика и съемника для транспортировки и съема обработанных деталей.
Техническим результатом использования предлагаемого изобретения является улучшение эксплуатационных характеристик, повышение надежности и ресурса работы путем упрощения устройства манипулятора за счет сокращения числа элементов конструкции и управления.
Технический результат достигается тем, что манипулятор, содержащий основание, установленный на нем корпус с направляющей, кривошипно-ползунный механизм, размещенный на направляющей, и привод, вал которого связан с кривошипом, а водило - с ползуном, установленным на направляющей и связанным с захватным устройством, корпус с направляющей имеет возможность поворота вокруг оси общего приводного вала в пределах, ограниченных упорами и контролируемого взаимодействием общей оси водила и ползуна с периферийной цилиндрической частью и радиальными пазами неподвижно закрепленного на основании копира, дополнительно снабжен установленным на общем приводном валу разгрузчиком с элементом удержания детали на концевой части в виде упругого упора, взаимодействующими с размещенным на основании вильчатым съемником-отсекателем и желобом-лотком, имеющим входную и выходную части, выполненные соответственно в виде восходящего и нисходящего наклонных участков, последний из которых связан с накопителем деталей.
Сопоставительный анализ с прототипом показывает, что отличительными признаками предлагаемого устройства манипулятора являются:
- иное исполнение и применение механизма поворота механической руки;
- иная конструкция устройства, контролирующего поворот руки;
- дополнительное снабжение манипулятора конструкцией разгрузчика;
- иная схема и конструкция съемника-отсекателя.
Перечисленные конструктивные признаки необходимы и достаточны для осуществления основных функций манипулятора, а именно: подвижность привода вала в угловом направлении позволяет осуществлять поворот; упорами и взаимодействием общей оси водила и ползуна с периферийной цилиндрической частью и радиальными пазами неподвижно закрепленного на основании копира фиксируются, контролируются и определяются пределы поворота и выдвижения руки манипулятора; наличие разгрузчика на общем приводном валу позволяет транспортировать деталь из зоны обработки к накопителю; наличие съемника-отсекателя позволяет осуществлять съем детали с разгрузчика и перемещение ее в лоток-накопитель.
В связи с вышеизложенным можно заключить, что совокупность отличительных признаков необходима и достаточна для выполнения поставленной задачи изобретения и достижения технического результата. Сопоставительный анализ прототипа и заявляемого технического решения показывает, что в предлагаемом устройстве манипулятора при реализации отмеченных отличительных признаков появляются новые, ранее не известные свойства. Следовательно, эти признаки являются существенными.
Сущность предлагаемого изобретения поясняется чертежами.
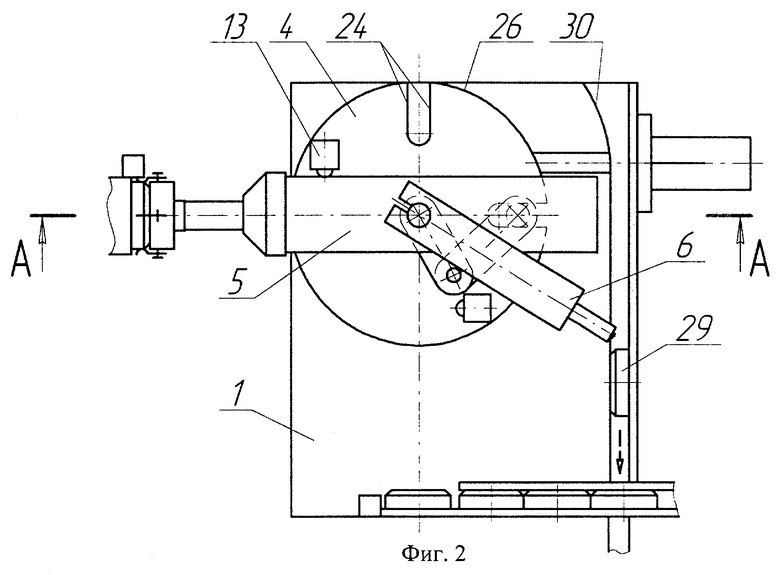
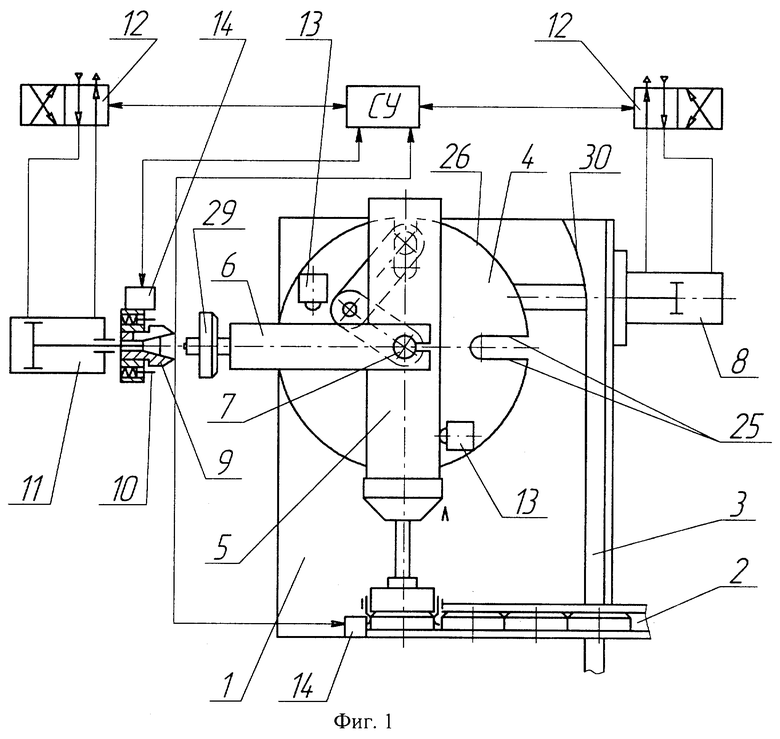
На фиг.1 и 2 соответственно представлен общий вид манипулятора в плане в конечных (крайних) рабочих положениях подвижных частей.
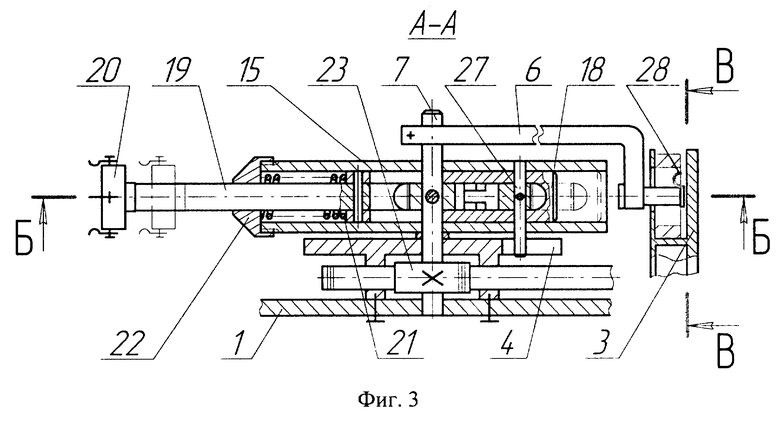
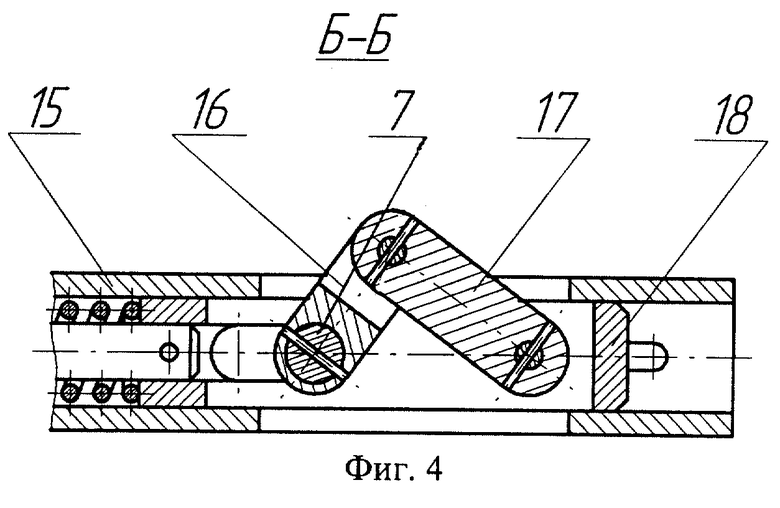
На фиг.3 и 4 изображена конструкция механической руки манипулятора в разрезах.
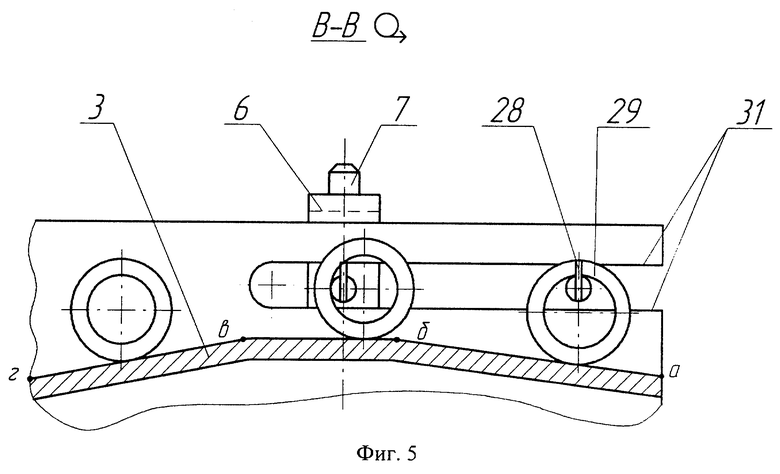
На фиг.5 показан разрез съемника-отсекателя.
Предлагаемый манипулятор содержит общее горизонтально установленное основание 1, на которое устанавливаются с возможностью регулирования загрузочный магазин 2, желоб-лоток 3, копир 4, механическая рука 5 и разгрузчик 6, размещенные на общем приводном валу 7, силовой привод 8 (например, гидро- или пневмоцилиндр). Цанговый патрон 9 станка, снабженный подпружиненными выталкивателями 10 и приводом 11, вместе с манипулятором управляются от системы управления (СУ) через распределители 12. Угол поворота механической руки 5 задается упорами 13 (упорами- демпферами в случае использования пневмопривода 8). Датчики 14 регистрируют крайние положения исполнительных органов механической руки 5. Конструкция механической руки 5 (см. фиг.3 и 4) представляет собой корпус с направляющей 15, размещенный в ней кривошипно-ползунный механизм, состоящий из кривошипа 16 (см. фиг.4), связанного с общим приводным валом 7, и водила 17, зафиксированного на ползуне 18, который в свою очередь установлен в направляющей 15 и посредством пальца 19 связан с захватным устройством 20. Пружина 21, установленная на пальце 19 и поджатая навинченной на направляющую 15 крышкой 22, обеспечивает возвратное перемещение ползуна 18 в исходное положение. Реечно-зубчатая передача 23, рейка которой связана со штоком цилиндра силового привода 8, а зубчатое колесо закреплено на общем приводном валу 7, обеспечивает выполнение функциональных действий манипулятора. Копир 4, установленный на основании 1, имеет радиально выполненные пазы 24-25 и рабочую периферийную часть 26, взаимодействующие с общей осью 27, фиксирующей водило 17 с ползуном 18. На общий приводной вал 7 установлен также разгрузчик 6 в виде Г-образного рычага, на концевой части которого размещен элемент удержания детали в виде упругого упора 28, предназначенного для предотвращения непроизвольного сброса детали 29 с разгрузчика во время ее транспортировки к входной части желоба-лотка 3. Съемник 30, установленный на основании 1, выполнен в виде вильчатого отсекателя 31. Желоб-лоток 3 имеет ломанную рабочую поверхность, состоящую из трех участков: входного "а-б" в виде восходящего наклонного участка (см. фиг.5), горизонтального участка "б-в" и выходного участка "в-г" в виде нисходящей наклонной поверхности, угол наклона которого к горизонтальной плоскости основания 1 больше угла самоторможения детали 29. Выходной участок "в-г" связан с накопителем деталей (условно не показан).
Манипулятор работает следующим образом.
Предварительно манипулятор устанавливается и настраивается на столе станка.
Подлежащие обработке заготовки типа втулок или колец размещаются в загрузочный магазин 2. Механическая рука 5 и разгрузчик 6 находятся при этом в начальном положении (см. фиг.1), соответствующем нулевой точке отсчета. Системой управления (СУ) станка подается сигнал-команда на распределитель 12, направляющий рабочую среду (сжатый воздух, давление масла) в левую полость цилиндра силового привода 8, который, перемещая шток вправо, воздействует на зубчато-реечную передачу 23, тянет за собой зубчатую рейку, которая, в свою очередь, взаимодействуя с зубчатым колесом, закрепленным на общем приводном валу 7, поворачивает его по часовой стрелке. Это действие через кривошипно-ползунный механизм перемещает ползун 18 (см. фиг.3 и 4) в крайнее положение, соответствующее выходу общей оси 27 из паза 24 копира 4 (см. фиг.1), тем самым обеспечивает беспрепятственный поворот направляющей 15 до касания ее с упором 13, после чего в действие опять приводится кривошипно-ползунный механизм, выдвигая захватное устройство в направлении на цанговый патрон 9 станка (см. фиг.2) в положение исполнительных органов манипулятора, соответствующее крайней точке отсчета. В момент касания захватного устройства и детали 29 с датчиком 14, подающим команду в СУ на зажим цангового патрона, производится перемещение штока цилиндра привода 11 влево и одновременно реверс штока цилиндра силового привода 8, тем самым поворот общего приводного вала 7 против часовой стрелки, что обеспечивает выполнение функциональных действий манипулятора в обратном порядке, а именно: задвижение захватного устройства, выход общей оси 27 из паза 25, поворот в исходное положение (см. фиг.1), выдвижение захватного устройства и вход общей оси 27 в паз 24. Касание захватного устройства и детали 29 с датчиком 14 включает станок в рабочий режим. Одновременно с механической рукой 5 в момент загрузки цангового патрона 9 станка совершает поворот разгрузчик 6, доставляющий уже обработанную деталь после сброса ее с цангового патрона 9 подпружиненными выталкивателями 10 на палец разгрузчика 6 к желобу-лотку 3 со съемником 30 (см.фиг.1 и 5) и вильчатым отсекателем 31, где деталь 29, удерживаемая упругим упором 28 от непроизвольного сброса под воздействием инерционных и центробежных сил во время поворота разгрузчика 6 вокруг приводного вала, заводится во входной участок "а-б" (см.фиг.5) желоба-лотка 3, где по восходящей наклонной рабочей поверхности деталь поднимается до горизонтального участка "б-в". На участке "б-в" (см. фиг.5) производится съем детали 29 с разгрузчика 6 посредством вильчатого отсекателя 31 ввиду того, что упругий упор 28, выведенный на уровень оси отверстия детали в этом положении, не препятствует ее свободному съему, а дальнейший поворот разгрузчика 6 вокруг общего приводного вала 7 выводит его из зоны съемника 30, где вильчатый отсекатель 31 снимает деталь (см. фиг.2), которая затем по нисходящему наклонному участку "в-г", угол наклона которого к плоскости основания 1 больше угла самоторможения детали, скатывается по желобу к накопителю обработанных деталей.
В предлагаемом устройстве манипулятора уменьшено число элементов конструкции и управления, осуществлены функциональные действия на поворот, выдвижение захватного устройства руки, а также по выгрузке и съему обработанных деталей использованием лишь одного силового привода, что значительно упрощает устройство манипулятора, его управление и обслуживание, что в конечном итоге повышает надежность, ресурс работы и другие эксплуатационные характеристики робототехнического модуля. Все это упрощает процесс автоматизации, снижает себестоимость и сокращает сроки внедрения.
На предлагаемое устройство манипулятора разработан комплект необходимой технической документации, изготовлен и успешно испытан опытный образец, внедрение которого в производство запланировано на ОАО "Волгабурмаш" (г. Самара).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Установка для закалки деталей | 1983 |
|
SU1157083A1 |
| Автооператор | 1978 |
|
SU779011A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Устройство для штамповки деталей из листового материала В.И.Васильева | 1989 |
|
SU1660805A1 |
| Полуавтоматическая линия для сборки,преимущественно,петель | 1983 |
|
SU1088912A1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Устройство для подачи материала в рабочую зону пресса и удаления отштампованных изделий | 1985 |
|
SU1321504A1 |
Изобретение относится к области машиностроения. Манипулятор представляет собой механическую руку, содержащую основание, установленный на нем корпус с направляющей, кривошипно-ползунный механизм, размещенный на направляющей, и привод, вал которого связан с кривошипом, а водило - с ползуном, установленным на направляющей и связанным с захватным устройством. Корпус с направляющей имеет возможность поворота вокруг оси общего приводного вала в пределах, ограниченных упорами, и контролируемого взаимодействием общей оси водила и ползуна с периферийной цилиндрической частью и радиальными пазами неподвижно закрепленного на основании копира. Манипулятор дополнительно снабжен установленным на общем приводном валу разгрузчиком с элементом удержания детали на концевой части в виде упругого упора, взаимодействующими с размещенным на основании вильчатым съемником-отсекателем и желобом-лотком, имеющим входную и выходную части, выполненные соответственно в виде восходящего и нисходящего наклонных участков, последний из которых связан с накопителем деталей. Изобретение позволит повысить надежность и ресурс работы. 5 ил.
Манипулятор, представляющий собой механическую руку, содержащую основание, установленный на нем корпус с направляющей, кривошипно-ползунный механизм, размещенный на направляющей, и привод, вал которого связан с кривошипом, а водило - с ползуном, установленным на направляющей и связанным с захватным устройством, отличающийся тем, что корпус с направляющей имеет возможность поворота вокруг оси общего приводного вала в пределах, ограниченных упорами, и контролируемого взаимодействием общей оси водила и ползуна с периферийной цилиндрической частью и радиальными пазами неподвижно закрепленного на основании копира, манипулятор дополнительно снабжен установленным на общем приводном валу разгрузчиком с элементом удержания детали на концевой части в виде упругого упора, взаимодействующими с размещенным на основании вильчатым съемником -отсекателем и желобом-лотком, имеющим входную и выходную части, выполненные соответственно в виде восходящего и нисходящего наклонных участков, последний из которых связан с накопителем деталей.
| Рука промышлнного робота | 1983 |
|
SU1229039A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| DE 19719931 A1, 01.10.1998. | |||

