I
Изобретение относится к обр)абот- ке металлов давлением, может быть использовано для удаления .деталей , из рабочей зоны прессов и является усовершествованием устройства по основному авт. св. № 645737.
Цель изобретения - повышение надежности устройства в работе и его долговечности.
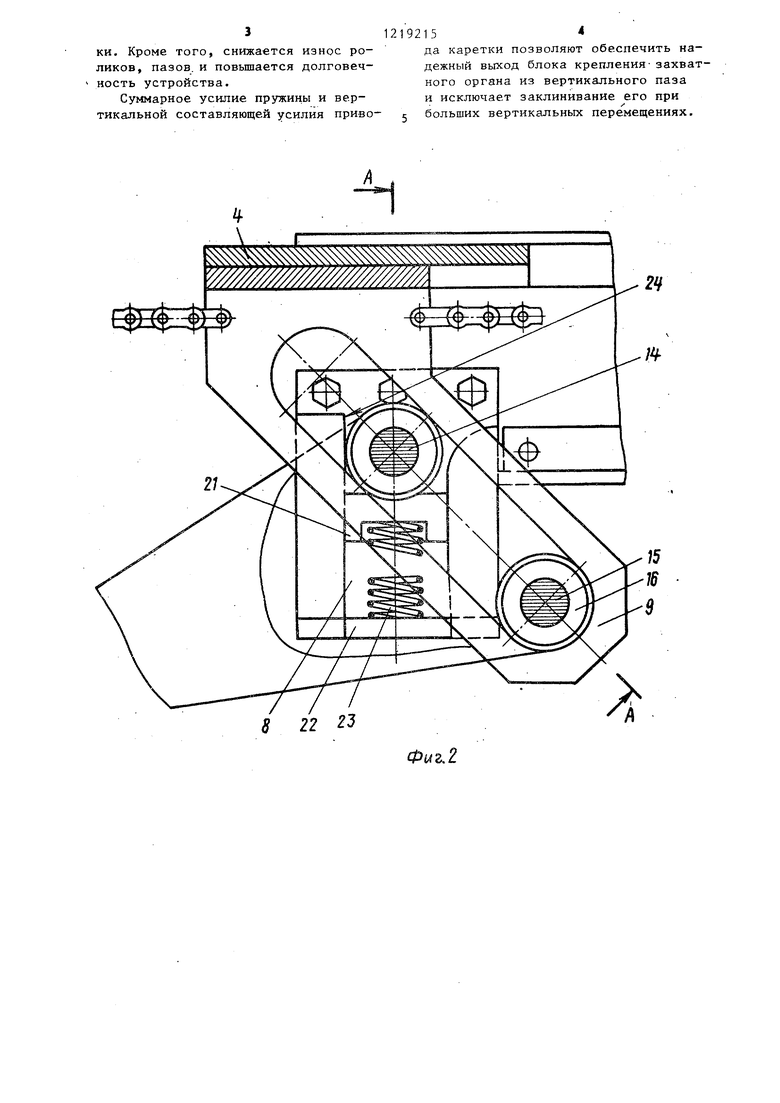
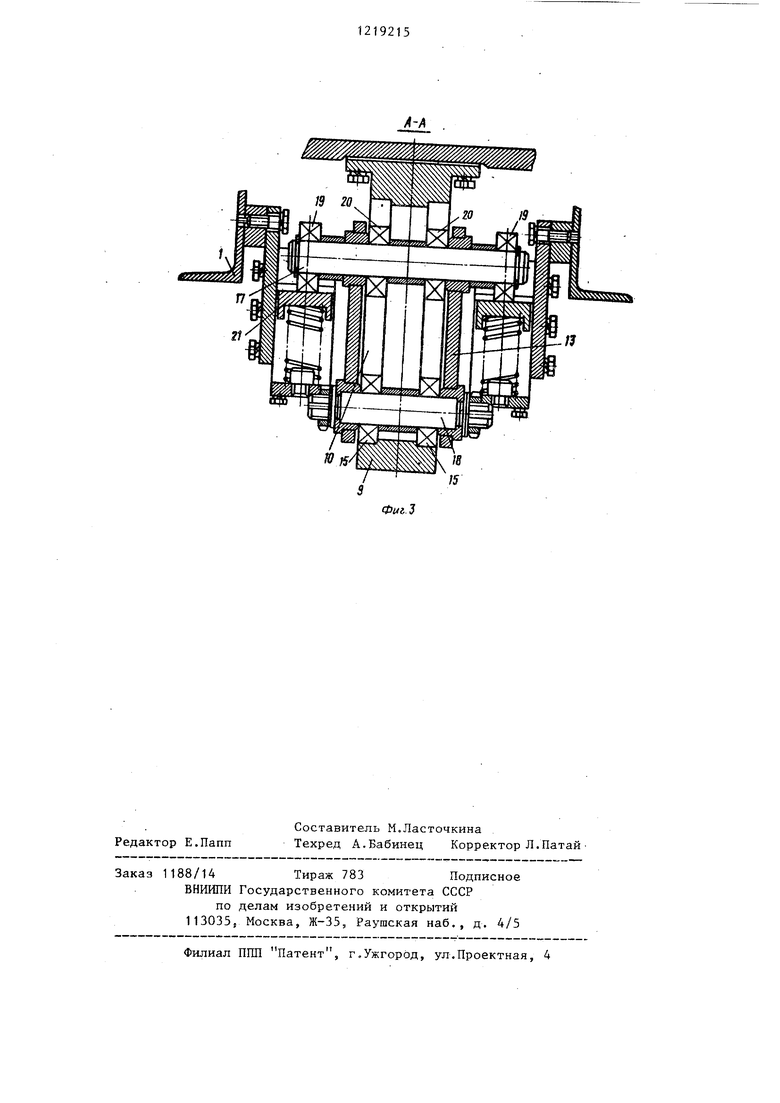
На фиг. 1 представлено устройство общий ВИД1 на фиг. 2 вид на каретку; на фиг. 3 сечение А-А на
Устройство содержит корпус 1, на боковой поверхности которого закреплены планки 2.J образующие продольные направляющие пазы 3. В последних установлена каретка 4, перемещение которой осуществляется силовым цилиндром 5 через редуктор 6 и цепную передачу 7.
На концевом участке со стороны позиции обработки детали (не показана) планки 2 образуют вертикальные пазы 89 сопряженные с продольными пазами 3 корпуса 1.
В нижней части каретки 4 имеется прилив 9. в котором вьшолнены наклонные к направлению движения каретки 4 направляющие дорожки 10.
Угол наклона дорожек 10 к направле, о нию движения каретки составляет 45
Захватный орган 11 с электромаг- нитньми захватами 12 закреплен на блоке 13 из двух верхней 14 и нижней 15 групп роликов 16, смонтированных на осях 17 и 18 соответственно. При этом верхняя группа -14 имеет две симметричные относительно продольной оси пары роликов, из которых внеш- няя 19 размещена в продольных направляющих пазах 3 корпуса 1 а внутренняя 20 - в направляющих дорожках 10 каретки 4.
Нижняя группа 15 роликов блока 13 включает одну пару роликов, которая размещена в направляющих дорожках 10 каретки 4,
В продольных направляющих пазах 3 установлены ползушки 21, поверхность которых, контактирующая с роликами 16, профилирована по радиусу роликов. Между ползушками 21 и съемными пластинами 22, образующими нижнюю стенку пазов 8 установлены npymiiHH 23,
Съемная пластина 22, являющаяся опорной площадкой для пружины 23, улучшает условия сборки узла и повышает его ремонтопригодность путем
192152
облегчения доступа к быстроизнашиваемым деталям.
Устройство работает следующим образом.
5 По окончании обработки детали по команде от программного устройства силовой цилиндр 5 через цепную передачу 7 перемещает каретку 4 с захватным органом 11 по пазам 3 кор0 пуса 1 в зону обработки детали. В конце хода внутренняя пара роликов 20 упирается в торец 24 пазов 3 корпуса 1. В этот момент внешняя пара роликов 19 сходит с продольных на5 правляющих пазов 3 и при дальнейщем движении каретки 4 в горизонтальном . направлении переходит на подпружиненные ползушки 21, вместе с которыми Начинает плавно опускаться по
0 вертикальным пазам 8. При этом ролики 20 и 15 перемещаются по наклонным дорожкам 10 каретки 4, а захватный орган 11 с электромагнитами 12 опускается в зону обработки и захва- 5 тывает деталь. Благодаря амортизирующему действию пружин 23 ход вниз захватного органа 11 происходит плавно и бесшумно.
Профилированная по радиусу роли0 ков 16 поверхность ползушек 21 увеличивает площадь контакта ползушки и ролика, что исключает возможность перекоса или смещения блока 13 креп- леМия захватного органа 1-1 и увеличивает точность его перемещения.
Затем силовой цилиндр 5 переключается на обратный ход, каретка 4 начинает движение назад. При этом ролики 20 и 15 блока 13 перемещаются вверх по наклонным дорожкам 10 каретки 4 и поднимают захватный орган 11. При дальнейшем движении каретки 4 в обратном направлении-.внешние ролики 19 блока 13 под cyMJ-iapHbiM действием вертикальной составляющей усилия привода каретки и усилия сжатых пружин 23 ВЬЕХОДЯТ на уровень продольных направляющих пазов 3 корпуса 1 .
Блок 13, двигаясь совместно с ка0 реткой 4, выводит захватный орган 11 с деталью из зоны обработки.
Подпружиненные ползушки осуществляют демпфирование блока к репления захватного органа при опускании
5 его в вертикальный паз корпуса, что обеспечивает плавность хода захватного органа, бесшумность работы устройства и исключает ударные нагруз5
0
5
ки. Кроме того, снижается износ роликов, пазов, и повьшается долговечность устройства.
Суммарное усилие пружины и вертикальной составляющей усилия приво12192154
да каретки позволяют обеспечить надежный выход блока крепления-захватного органа из вертикального паза и исключает заклинивание его при
/
t больших вертикальных перемещениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи материала в зону обработки | 1987 |
|
SU1442299A1 |
| Устройство для подачи полосового и ленточного материалов в штамп | 1983 |
|
SU1138212A1 |
| Устройство для удаления деталей | 1977 |
|
SU645737A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Устройство для перемещения заготовок в рабочей зоне пресса | 1986 |
|
SU1433593A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1985 |
|
SU1266614A1 |
| Устройство для удаления отходов из рабочей зоны пресса | 1990 |
|
SU1759510A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |

1
22 23
0W2.2
Редактор Е.Папп
Составитель М.Ласточкина
Техред А.Бабинец Корректор Л.Патай
1188/14 Тираж 783 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г,Ужгород, ул.Проектная, 4
| Устройство для удаления деталей | 1977 |
|
SU645737A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
