112
Изобретение относится к механизации погрузочно-разгрузочных работ, может быть использовано при создании промышленных роботов,и является усовершенствованием манипулятора по авт.св. № 536003.
Цель изобретения - повышение безопасности эксплуатации манипулятора.
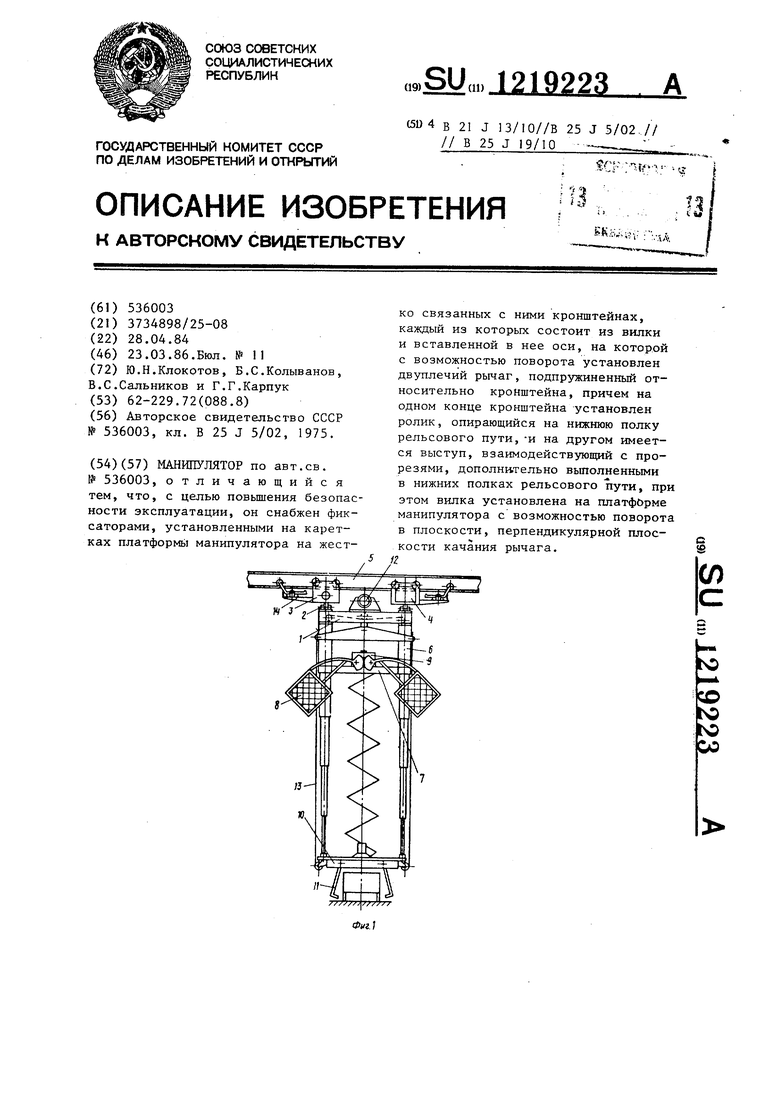
На фиг.1 изображен манипулятор, общий вид; на фиг,2 - фиксатор.
Манипулятор содержит платформу 1, которая шарнирно подвешена на проушинах 2 к приводной 3 и холостой 4 кареткам, установленньпч на рельсовый путь 5. К платформе 1 крепятся вертикальные телескопические направ- ляюшие 6, связанные промежуточной рамой 7э на которой установлено сетчатое ограждение 8 с приводом 9.
Нижние звенья телескопических- направляющих 6 жестко связаны с подъемной рамой 10, на которой находится механизм 11 захвата. Перемещение подъемной рамы 10 с механизмом 1I захвата осуществляется от привода 12 на платформе 1 через канаты 13,
На платформе 1 с двух сторон установлены фиксаторы 14. Последние смонтированы на кронштеййах 15 (фиг.2) жестко закрепленных на каретках. На каждом кронштейне 15 установлен упор
2232
16, на котором с возможностью поворота в отверстии упора 16 установлена вилка 17, связанная с двуплечим рычагом 18, который имеет возможность 5 поворота вокруг оси 19, установленной в проушинах вилки 17, под действием пружины 20. На одном конце рычага 18 установлен ролик 21, а на другом имеется выступ 22. Ролик 21 o опирается на нижнюю полку рельсового пути 5 и удерживает рычаг 18 в- среднем положении. К рычагу 18 крепятся регулируемые контакты 23 и 24, выполненные с возможностью воздейст- 5 ВИЯ на микровыключатели 25 и 26 в зависимости от положения рычага 18. Фиксатор работает следующим образом.
При сходе ролика 2 с нижней пол- 20 ки рельсового пути и их упора в препятствие рычаг 18 поворачивается на оси 19 и прижимается к левой или правой стороне упора 16.
25 При этом контакты 23 или 24, нажимая на микровыключатели 25 или 26, разрывают цепь питания привода механизма передвижения, а выступы 22 заходят в прорези в нижних полках рель сового пути и осуществляют аварий30
ный останов манипулятора.
Я jr
20
П
J9 п
2 21
Фиг. 2
ВНИИПИ Заказ П89/15 Тираж 655 Подписное Филиа,п-ППП Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU536003A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Транспортное средство для перевозки аварийных транспортных средств | 1991 |
|
SU1830014A3 |
| КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ВЕРТИКАЛЬНЫХ СТВОЛОВ | 2014 |
|
RU2556764C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1990 |
|
SU1774998A3 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| Манипулятор для перегрузки штучных грузов | 1988 |
|
SU1535798A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Установка для стопирования и подачиСушильНыХ PAMOK B ABTOMAT-уКлАдчиККЕРАМичЕСКиХ издЕлий | 1979 |
|
SU808319A1 |
| Манипулятор | 1975 |
|
SU536003A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
