СО
4
О)
О1
1
Изобретение относится к роботехнике я может быть использовано в автоматических манипуляторах в различных технологических процессах при манипулировании миниатюрными деталями, например радиоэлементами цилиндрической формы на радио- и телезаводах.
Цель изобретения - расширение технологических возможностей устройства.
Указанная цель достигается тем, что схват манипулятора, содержащий корпус и закрепленные в корпусе упругие зажимные губки с приводом, вьтолненным в виде установленной в корпусе с возможностью перемещения плиты с окнами, в которых размещены зажимные губки, корпус охвата снабжен сьем гь ми вкладышами, установлениь ми в корпусе между зажимными губками, а привод перемещения губок снабжен второй плитой, установленной и выполненной аналогично первой, и планкой со штифташ5, размещенной в корпусе с возможностью.поворота, причем в плитах вьтолнены пазы,предназначенные, для разкещеш-ш в них штифтов планки.
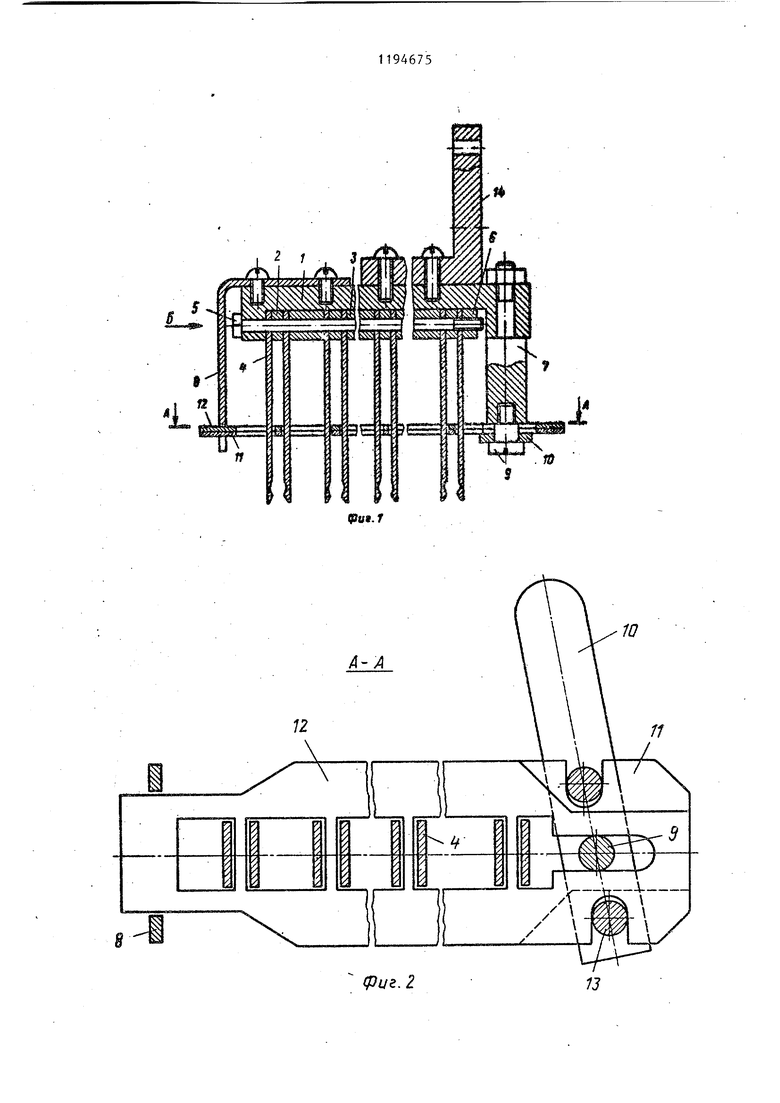
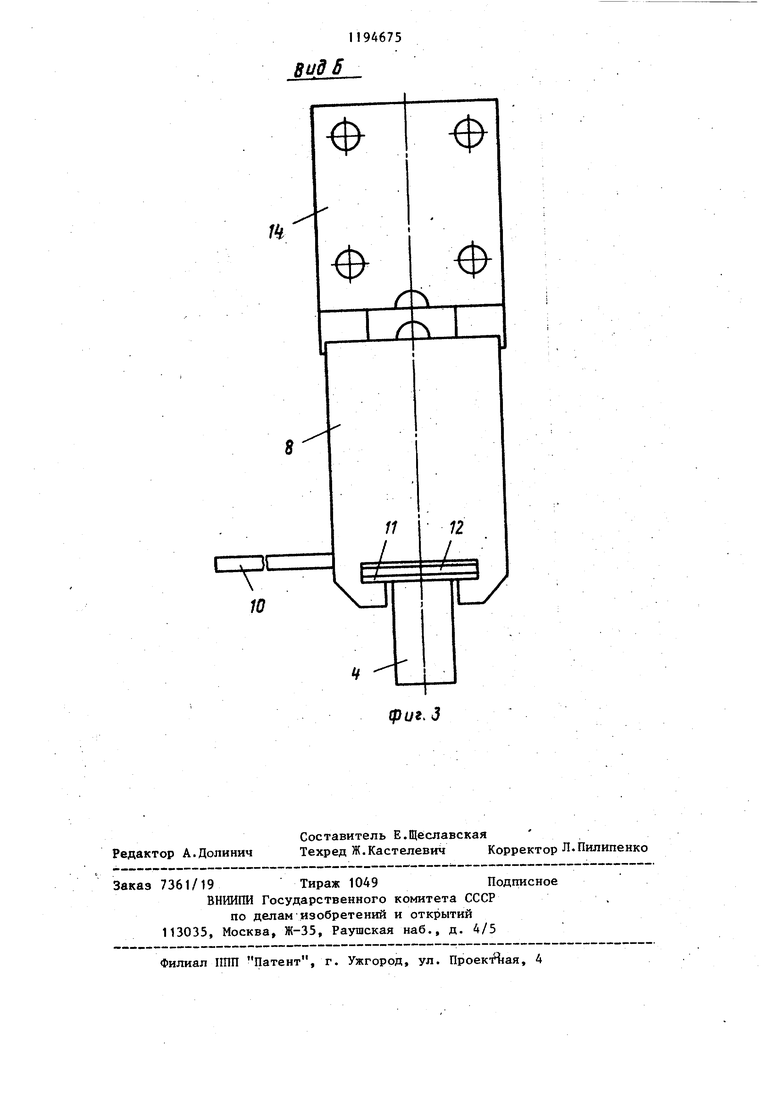
На фиг. 1 изображен схват, общий вид, продольный разрез , на фиг. 2 paspes Л-Л ка фиг, 1; на фиг. 3 Б1,эд Б на фтгг. 1.
Схват гa tfипyлятopa состоит из корпуса 1, имеющего продольгшй паз, в котором через сменные вкладьшшс 2 и 3 установлены губки 4. Губки 4 вьтолнены в виде пластинчатых пружи с призматическим профт-шем на ншкних концах. Губки установлены попарно, как показано на фиг. 1. Весь пакет
46752
губок и вкладьшей стянут винтом 5 и гайкой 6. На одном конце корпуса 1 установлена стойка 7, на другом конце - кронштейн 8. На оси 9, находящейся в стойке 7, установлены поворотная- планка 10 и две пластины 11 и 12, противоположные концы которых удерживаются в прорези кронштейна 8, Пластины 11 и 12 имеют окна, перемычки между которыми расположены между смежными губками 4, обращенными друг к другу призматическим профилем. На оси 9 пластины 11 и 12 установлены при помощи паза с возможностью их продольного перемещения. На поворотной планке 10 закреплены два штифта 13 (см.фиг.2), один из которых входит в поперечный паз пластины 11, другой - в поперечный паз пластины 12. Для соединения с рукой манипулятора к корпусу 1 прикреплен кронштейн 14.
СхваТ работает следующим образом.
При опускании схвата вниз губки 4, войдя в контакт с деталями, предварительно уложенными в один ряд параллельно друг другу с шагом,равным шагу попарного расположения губок, раздвигаются и фиксируют детали призматическим профилем. После манипулирования деталями их разгрузка осуществляется в конце продольного кода руки манипулятора. Для этого на пути движения внешнего конца поворотной планки .10 должен быть установлен упор, при нажатии на который планка 10 поворачивается вокруг оси 9, штифты 13 смещают пластины 11 и 12 в противоположные стороны, перемычки между окнами на пластинах раздвигают губки, освобождая зажатые между ними детали.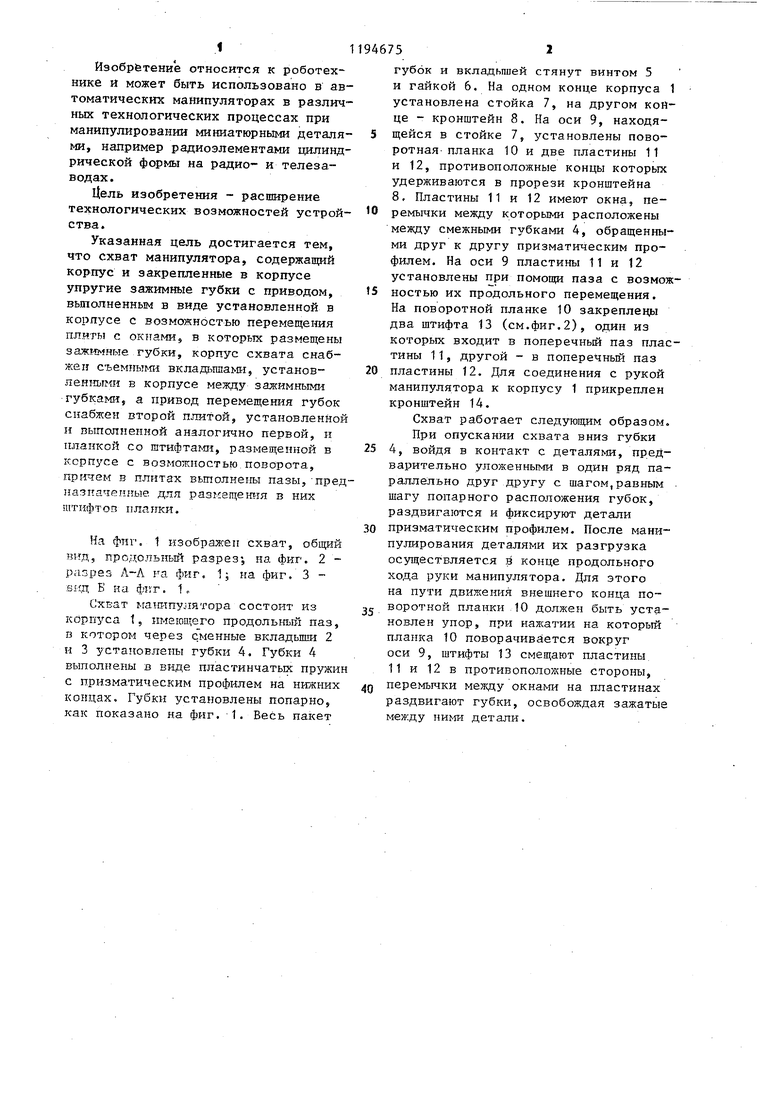
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Групповой схват | 1985 |
|
SU1311926A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Манипулятор | 1981 |
|
SU1050860A1 |
СХВАТ МАНИПУЛЯТОРА, содержащий корпус и закрепленные в корпусе .упругие зажимные губки с приводом, выполненным в виде установленной в корпусе с возможностью перемещения плиты с окнами, в которых размещены зажимные губки, отличающийся тем, что, с целью расширения технологических возможностей путем захвата деталей различных размеров, корпус схвата снабжен сменными вкладышами, расположенными мелду зажимными губками, а привод перемещения губок снабжён второй плитой, выполненной аналогично первой и установленной относительно нее с возможностью перемещения, и планкой со штифтами, размещенной в корпусе с возможностью поворота, причем в плитах выполнены пазы, предназначенные для размещения в них штифтов планки.
Фи. 2
вид 6
ryii
W
LJI11
12
ГУ
хл
«р(;г. J
| Авторское свидетельство СССР 689811, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
