24 S I 8 I Изобретение относится к машиностроению, преимущественно к привода губок схвата манипулятора. Целью изобретения является повышение производительности за счет ув личения усилия захвата при низких массо-габаритных показателях. На фиг. 1 изображен схват с приводом линейного перемещения; на фиг. 2 - вид А на;фиг. 1. Устройство содержит губки 1, сое диненные с двуплечими рычагами 2, закрепленными на руке 3 манипулятрра, К рычагам 2 с помощью шарниров 4 прикреплены пластины 5. Рычаги ст нуты пружиной 6. Подшипник служит для соединения рычагов. Между пластинами 5 установлены концентрично расположенные витки 8 и 9 активных элементов привода, выполненные из токопроводящего материала, а в рабочей зоне схвата установлена плита 10 из магнитопроводного материала. Привод работает следующим образом. В исходном состоянии витки 8 и 9 обесточены. Пластины 5 с помощью рычагов 2 и пружины 6 сжимают витки 8 и 9. Губки 1 сжаты. При необходимости расжатия губок витки 8 и 9 по мещаются в непосредственной близост от плиты 10, расположенной в рабоче зоне схвата,.и подключаются к источ 36I вику тока (не показан) во встречных направлениях, Возникающие в этом случае силы отталкивания между витками 8 и 9 действуют на пластины и через рычаги 2 , разводят губки 1 для захвата детали. После подведения губок к детали витки 8 и 9 обесточиваются, пружина 6 сжимает рычаги 2 и происходит захват детали. Формула изобретения Схват манипулятора, содержаш;ий два двуплечих рычага, подпружиненных один к другому и шарнирно связанных между собой, на одних концах которых установлены губки, а другие концы связаны с приводом их поворота, отличающийся тем, что, с целью повьщ1ения производительности за счет увеличения грузоподъемности схвата, привод выполнен в виде двух концентрично расположенных витков из токопроводящего материала, двух пластин, шарнирно связанных с концами рычагов, и плиты из магнитопроводного материала, при этом витки установлены между пластинами, а плита расположена в рабочей зоне схвата с возможностью электромагнитного взаимодействия с витками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| Устройство для захвата и перемещения электропроводных материалов | 1983 |
|
SU1199584A1 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Схват | 1983 |
|
SU1119842A1 |
| Захватное устройство робота | 1987 |
|
SU1423373A1 |
| Схват манипулятора | 1984 |
|
SU1301698A1 |
Изобретение относится к приводам манипуляторов промьппленных роботов, входящих в технологическую единицу гибкого автоматизированного производства. Схват манипулятора содержит два двуплечих рычага 2, шарнирно связанных между собой и подпружиненных один к другому, на одних концах которых установлены губки, а другие - связаны с приводом их поворота, включающим два концентрично расположенных витка 8 и 9 из токопроводного материала, которые подключаются к источнику тока во встречном направлении. Раздвигаясь, витки раздвигают пластины 5, связанные с рычагами, и разводят губки схвата. В зоне работы схвата расположена плита 10 из магнитопроводного мг.териала для увеличения усилия, создаваемого приводом. 2 ил.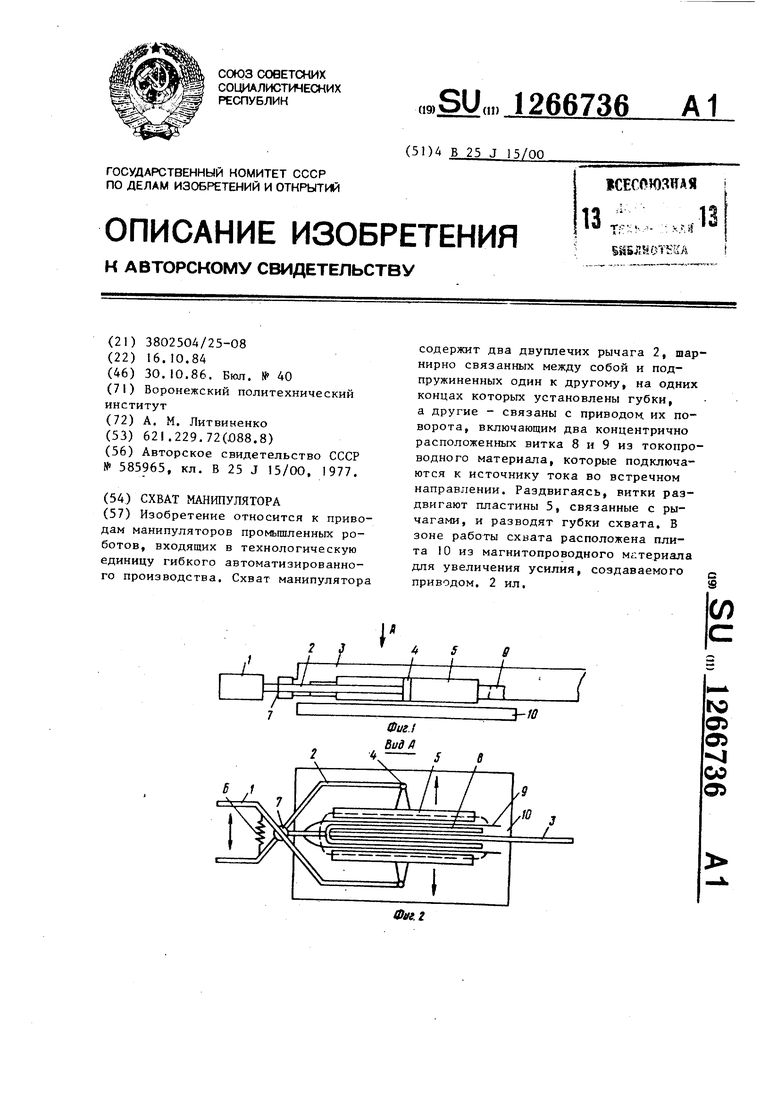
| Схват руки манипулятора | 1975 |
|
SU585965A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
