Изобретение относится к машиностроению, а именно к манипуляторостроению, и предназначено для усовершенствования механических рук промышленных роботов, используемых для автоматизации основных и вспомогательных операций.
Цель изобретения - повышение произ- водите/тьности путем уравновешивания звена с поступательной кинематической парой.
На фиг. 1 показана кинематическая схема механической руки; на фиг. 2 - схема расположения уравновешиваюших масс.
На основании 1 установлены последовательно соединенные с основанием с помощью поступательных и вращательных кинематических пар звенья 2-5 с приводами
связанный с ним кулачок 12. Вращение кулачка 12 приводит к изменению координат установленных на звене 4 уравновешивающих масс 10 и 11. В целях устранения динамического влияния при движении
звена 4 на приводы других звеньев перемещение уравновешивающих масс 10 и 11 вдоль оси звена 4 должно удовлетворять следующим условиям: центр масс звена с уравновешивающими массами не меняет
10 своего положения на оси звена относительно принятого начала координат mE+Mxi-fMx2 0;
момент инерции звена и уравновешивающих масс относительно оси, проходящей через центр масс и перпендикулярной оси
6-8 их относительного перемещения, при- звена, остается постоянным при движении чем звено 4 связано с основанием 1 пово- звена
ротным звеном 2. На звене 4 по обе стороныJ+mf-f Mx|-f Mxi kJ const.
от оси поворота размещены на направляю-Решая совместно эти уравнения, получим
щей две уравновешивающие массы 10 и 11, зависимость координат уравновешивающих кинематически связанные с кулачком 12, за- jo координат звена крепленным на одной оси с шестерней 13, кинематически связанной с рейкой 14, которая жестко закреплена на звене 4. На звене 5 жестко закреплены уравновешивающие массы 15 и 16.
Механическая рука работает следующим 25 образом.
При перемещении звена 4 от привода 8 установленная на нем рейка 14 приводит
i,i
() (L -Р)
2М
во вращение зубчатое колесо 13 и жестко
где т, М - массы звена и уравновешивающих масс соответственно; I-координата центра масс звена; L - максимальное значение координаты центра масс звена; Xi,2 - координаты уравновешивающих масс.
связанный с ним кулачок 12. Вращение кулачка 12 приводит к изменению координат установленных на звене 4 уравновешивающих масс 10 и 11. В целях устранения динамического влияния при движении
звена 4 на приводы других звеньев перемещение уравновешивающих масс 10 и 11 вдоль оси звена 4 должно удовлетворять следующим условиям: центр масс звена с уравновешивающими массами не меняет
своего положения на оси звена относительно принятого начала координат mE+Mxi-fMx2 0;
момент инерции звена и уравновешивающих масс относительно оси, проходящей через центр масс и перпендикулярной оси
звена, остается постоянным при движении звена
висимость координат уравновеши координат звена
i,i
() (L -Р)
2М
зависимость координат уравновешивающих координат звена
где т, М - массы звена и уравновешивающих масс соответственно; I-координата центра масс звена; L - максимальное значение координаты центра масс звена; Xi,2 - координаты уравновешивающих масс.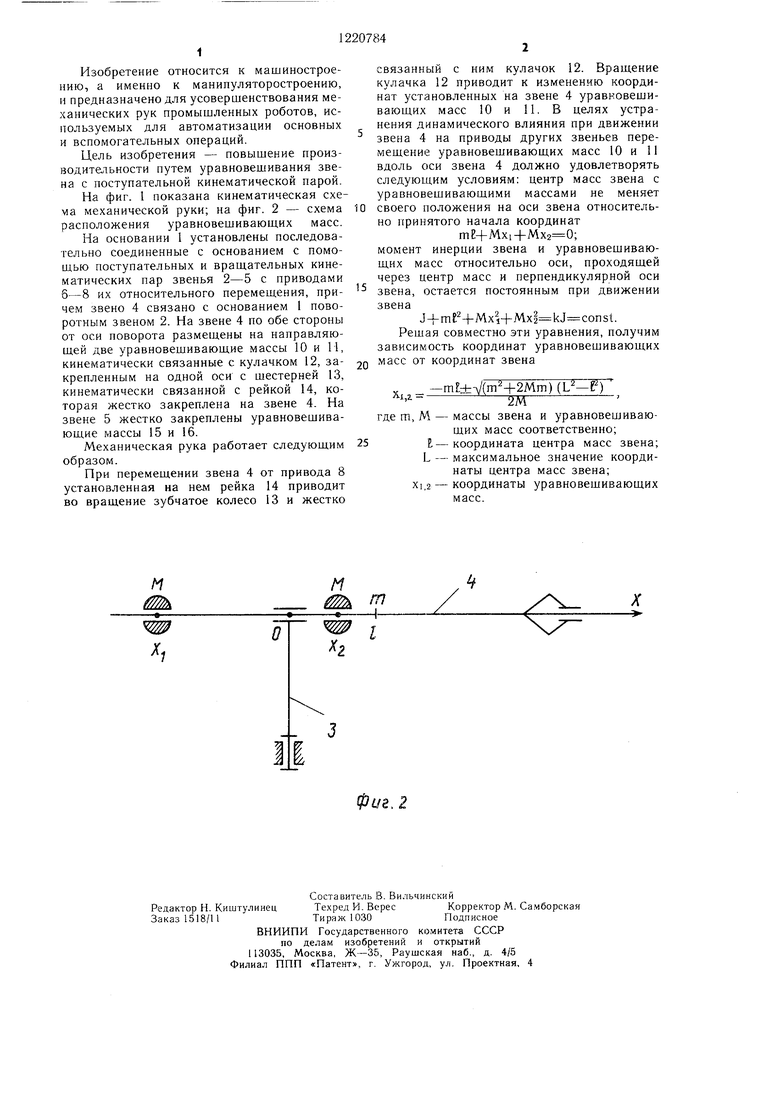
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука промышленного робота | 1984 |
|
SU1220786A1 |
| Механическая рука промышленного робота | 1984 |
|
SU1222535A1 |
| Привод талера плоскопечатной машины | 1978 |
|
SU719894A1 |
| Механическая рука промышленного робота | 1982 |
|
SU1093534A1 |
| Прибор для демонстрации движения центра масс механической системы по инерции | 1980 |
|
SU1029219A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| Манипулятор | 1988 |
|
SU1537518A1 |
| Уравновешенный шарнирный четырехзвенник | 1990 |
|
SU1805253A1 |

М
н
о
ч
- J
фи,2
| Козырев Ю | |||
| Г | |||
| «Промышленные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
