Изобретение относится к машиностроению, а именно к манипуляторостроению, и предназначено для усовершенствования механических рук промышленных роботов, используемых для автоматизации основных и вспомогательных операций.
Цель изобретения - повышение производительности манипулятора путем уравнове шивания кинетических моментов звеньев относительно осей их вращения.
На фиг. 1 показана расчетная схема; на фиг. 2 - кинематическая схема механической руки; на фиг. 3 - вариант установки роторов.
Для достижения указанной цели в механических руках, структуры которых содержат более трех вращательных кинематических пар с последовательно перпендикулярными осями, необходимо обеспечить
а.Статическую балансировку всех звеньев, кроме первого, относительно осей присоединяющих шарниров (с учетом присоединенных масс последующих звеньев);
б.Равенство друг другу центральных осевых моментов инерции звеньев (начиная со звена, ось вращения которого перпендикулярна оси вращения первого звена) относительно осей, перпендикулярных оси присоединяющего шарнира, так же с учетом присоединенных масс последующих звеньев;
в.Равенство друг другу всех трех главных центральных моментов инерции звеньев, начиная со звена, ось вращения которого имеет переменный угол с осью вращения первого звена;
г.«Нулевой кинетический момент (упомянутый в в) звеньев относительно оси, связанной с предыдущим звеном.
Необходимость выполнения этих условий для устранения динамического взаимовлияния приводов следует из схемы, показанной на фиг. 1, где первые два подвижных звена представляют собой жесткие невесомые стержни с сосредоточенными по краям массами ГП и Ш2, а третье звено - твердое тело массы Шз, имеющее ось симметрии в плоскости, перпендикулярной третьей вращательной паре. С третьим звеном связана система декартовых координат (озхзузхз) с началом в центре масс звена. Ось уз направлена вдоль оси симметрии звена, ось 2з параллельна оси третьей кинематической пары, ось хз дополняет систему. Обозначив через рз - расстояние от оси шарнира до центра масс третьего звена; 1, 1у, L - центральные моменты инерции третьего звена; qi, q2, Яз - относительные углы поворота звеньев в шарнирах, кинетическая энергия третьего звена Тз определяется формулой
Тз (ft -f facosqa -f
+ p3cosq2cosq3) + plsin qa + + q2(f2 + p3Cosq3) + 2qiq2(f2 + +/03Cosq3)P3sinq2Cosq3 -f qipi + -f- 2qiq3 (t -f f2cosq2)p3cosq3 -f- -f p3C03q2 j + -y I;,(qisinq2sinq3 -f + q2cosq3) + I,,(qisinq2cosq3 - - iq2Sinq3) + I3(qicosq2 + q3)J
Из формулы видно, что для того, чтобы кинетическая энергия всей системы не зависела от положения последнего звена и, следовательно, инерционные нагрузки на приводы первого и второго звеньев не зависели от положения третьего звена, необходимо выполнение по отнощению к третьему звену
J условия (а) и (б): рз О и 1 у.
Кроме того, для того, чтобы упомянутые нагрузки не зависели от скорости (4з) третьего звена, необходимо выполнение условий (б); Ij; 1, 1 и (г) равенства нулю выражения 2Uqiq3COsq2. Если выполнение ус0 ловия (0) требует установку дополнительных уравновещивающих масс вдоль оси z, то для выполнения условия (г) следует вводить в систему механизм с уравновешивающими маховиками.
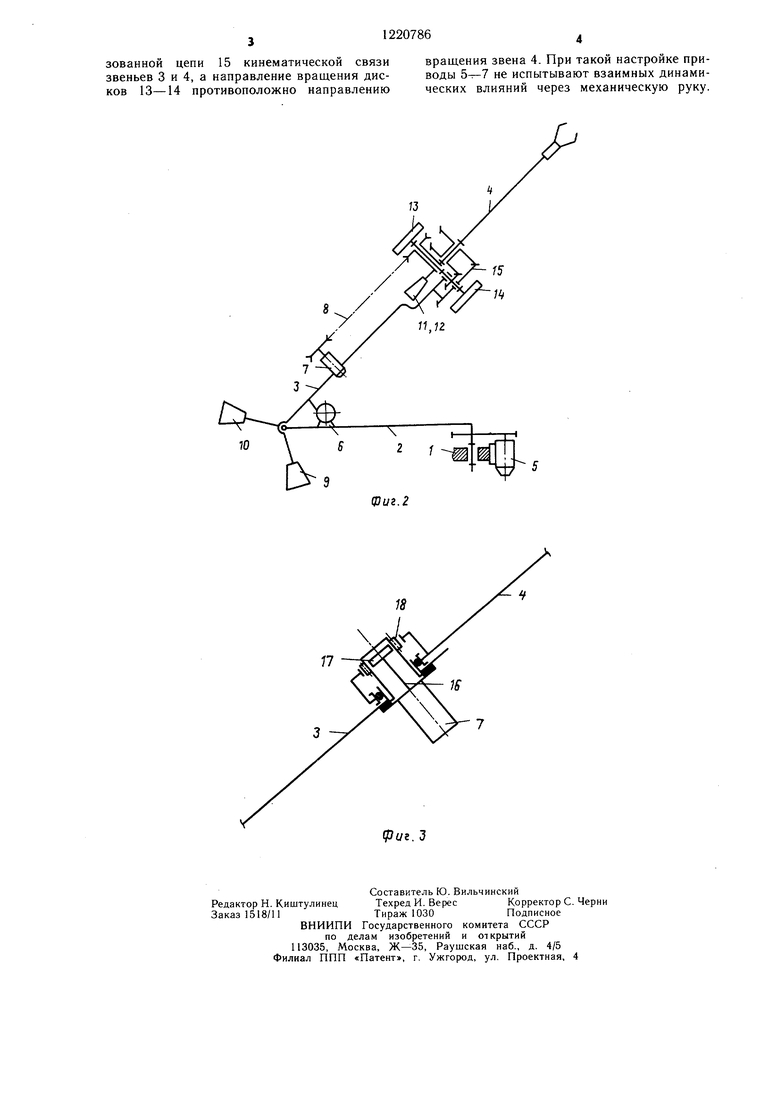
5 Механическая рука промышленного робота состоит из основания 1, последовательно соединенных с помощью вращательных пар звеньев 2-4 с соответствующими приводами 5-7 их вращения, тросовой передачи 8, уравновещивающих масс 9 и 10
0 звена 3, уравновещивающих масс 11 и 12 звена 4, уравновешивающих поворотных дисков 13 и 14 звена 4 и кинематической передачи 15, связывающей диски 13 и 14 с звеньями 3 и 4.
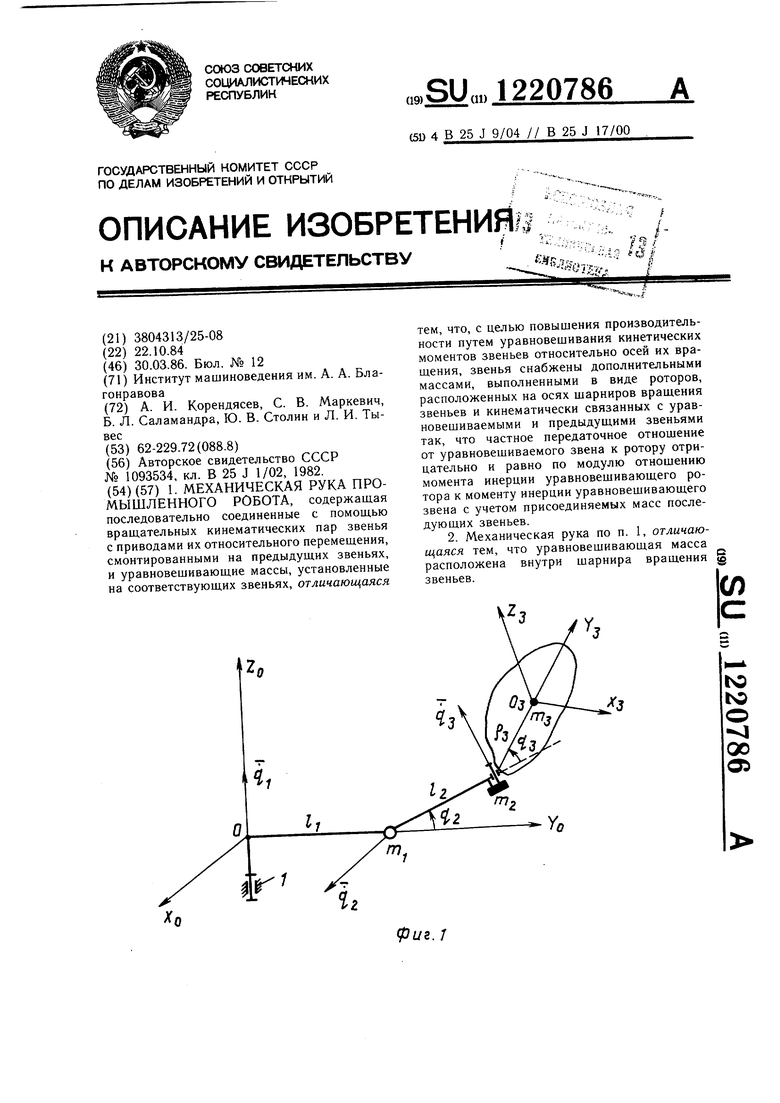
Вариант установки уравновешивающих дисков-роторов показан на фиг. 3, где в качестве дополнительных установленных уравновешивающих роторов использованы ротор 16 приводного двигателя и генератор 17 волн волнового редуктора 18, установленные в шарнире уравновешивающего звена и связанные с ним отрицательным передаточным отношением.
Механическая рука работает следующим образом.
5
Уравновещивающие массы 9-10 и 11 -
12 подбираются таким образом, чтобы удовлетворить как условиям (а) статического равновесия звеньев 3 и 4, так и условиям (б) равенства осевых моментов инерции
0 этих звеньев. Массы и моменты инерции уравновешивающих дисков 13-14 выбираются из условий (в) и (г) равенства друг другу всех трех главных моментов инерции звена 4 и равенства друг другу кинетических моментов относительно оси вращения зве5 на 4 с уравновещивающими массами II -12 и уравновешивающих дисков 13-14, причем привод уравновешивающих дисков 13-14 осуществляется за счет специально органи0
зованной цепи 15 кинематической связи звеньев 3 и 4, а направление вращения дисков 13-14 противоположно направлению
вращения звена 4. При такой настройке приводы не испытывают взаимных динамических влияний через механическую руку.
ГЗ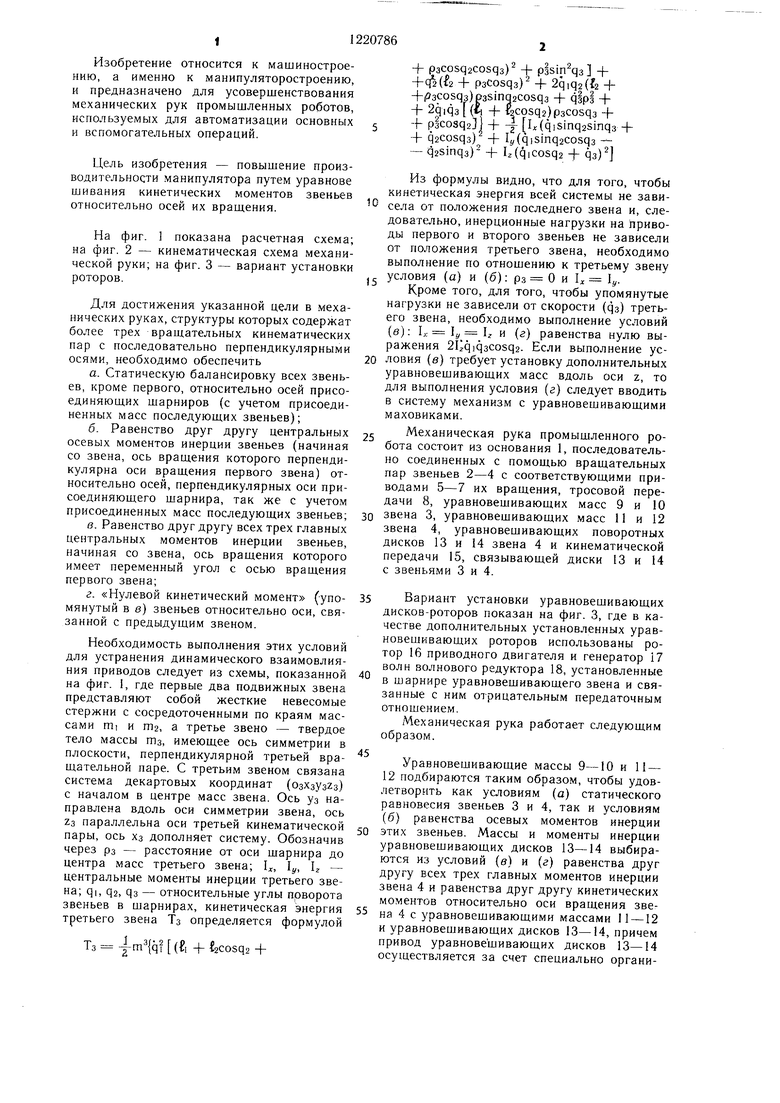
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука промышленного робота | 1982 |
|
SU1093534A1 |
| Шарнирный четырехзвенник | 1989 |
|
SU1724969A1 |
| Механическая рука промышленного робота | 1984 |
|
SU1220784A1 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Шарнирный четырехзвенник | 1990 |
|
SU1800170A1 |
| Механическая рука промышленного робота | 1984 |
|
SU1222535A1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО СТРЕЛКОВОГО ОРУЖИЯ | 2002 |
|
RU2251650C2 |
17
18
Составитель Ю. Вильчинский Техред И. ВересКорректор
Тираж 1030Подписное
Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5 Филиал ППП «Патент, г. Ужгород, ул. Проектная,
Редактор Н. Киштулинец Заказ 1518/11
вниипи
. 3
| Механическая рука промышленного робота | 1982 |
|
SU1093534A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
