Изобретение относится к машинострению, точнее к манипуляторостроению, и предназначено для усовершенствования механических рук промьппленных роботов, используемых для автоматиза-, ции основных и вспомогательных операций .
Целью изобретения является упрощение конструкции за счет уменьшения числа регулируемых элементов.
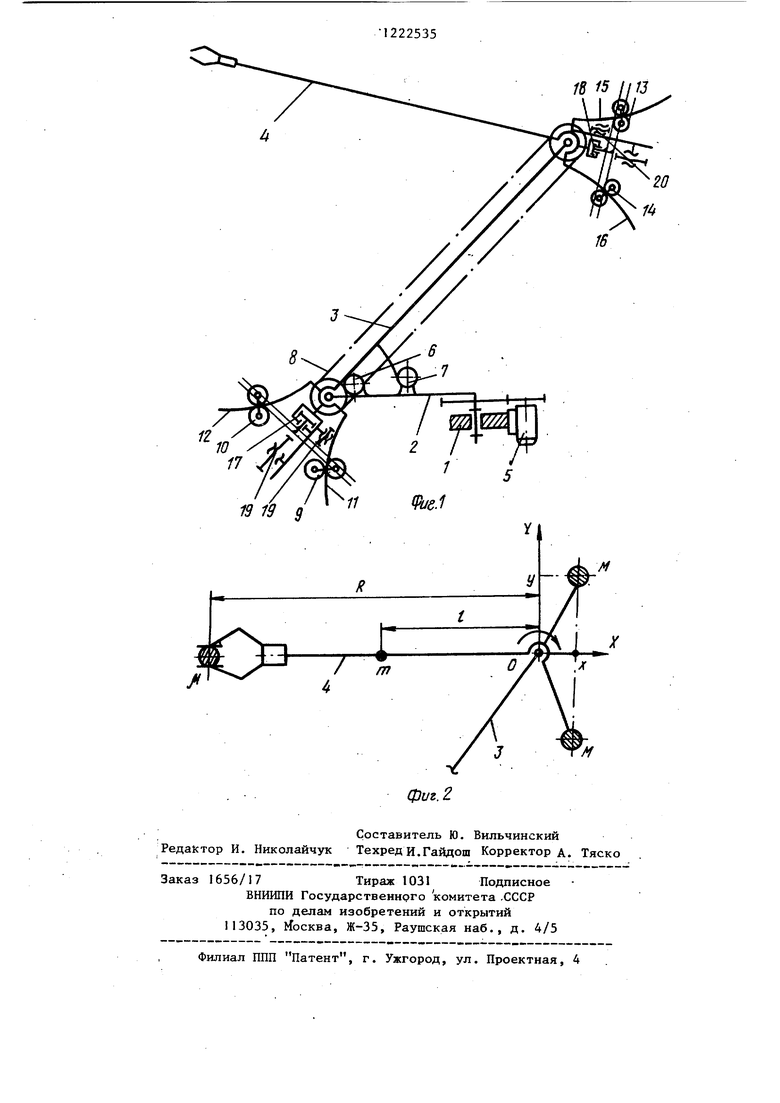
На фиг. 1 показана кинематическая схема механической руки; на фиг. 2 - расчетная схема для определения формы поверхности направляющих.
Механическая рука промьшшенного робота состоит из основания 1, звеньев 2-4 скелета руки, их индивидуальных приводов 5-7, гибкой передачи 8, уравновешивающих масс 9 и 10 звена 3 и их направляющих 11 и 12, уравновешивающих масс 13 и 14 звена 4 и их направляющих 15 и 16, приводов 17 и 18 (например, пневмоприводов) уравновешивающих масс 9, 10 и 13, 14 соответственно и их регулируемых упоров 19 и 20.
На расчетной схеме для определения формы поверхности направляющих (фиг. 2) обозначены дпина R звена, расстояние 1 от оси присоединяющего шарнира до центра масс звена, мае-. са m звена (без учета уравновешивающих масс) , изменяемая масса (U (полезный груз), уравновешивающая мас- са М, оси X, У системы координат ХОУ, связанной со звеном. При этом
1. ly носительно осей X и У.
моменты инерции звена от
Для устранения динамического влияния при движении звена-на приводы других звеньев требуется выполнение двух условий.
Центр масс звена с уравновешивающими массами и полезным грузом должен находиться на оси шарнира (в центре о):
(UR + mt 2Мх.
Моменты инерции звена с полезным грузом и уравновешивающими массами относительно орей X и У должны быть равны друг другу:
) 1,
2Мх
2Мц7 + I,
Исключая массу полезного груза из полученных уравнений, найдем формулу кривой для направляющих
у x2 + Rx + (Ц-1х-т1Я)/2М: . Механическая рука работает следующим образом.
Регулируемые упоры 19 и 20 приводов 17 и 18 настраиваются таким
образом, чтобы удовлетворить условиям статического уравновешивания звеньев 3 и 4 как.при наличии объекта манипулирования на свободном конце звена 4, так и при его отсутствии.
При этом с учетом выбранной формы кривой равенство моментов инерции относительно осей X и У выполняется автоматически. При такой настройке приводы 6 и 7 не испытывают взаимных динамических влияний через механическую руку.
/J
,Составитель Ю, Вильчинский
Техред и.Гайдош Корректор д. Тяско
™ -- .-.-«. .«
Заказ 1656/17Тираж 1031 ПодписноГ
ВНИИПИ Государственного комитета .СССР
по делам изобретений и открытий 113035, focквa, Ж-35, Раушская наб., д. 4/5
.и. «в.
Филиал ППП Патент, г. Ужгород, ул. Проектная
фиг. 2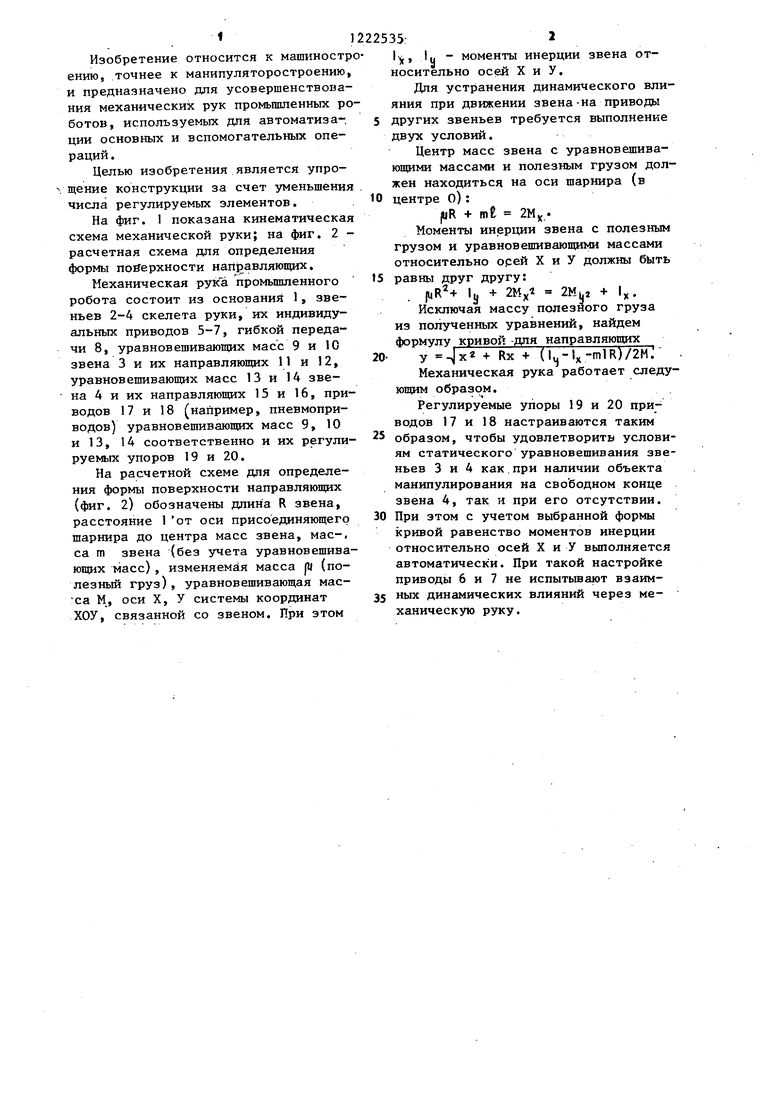
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука промышленного робота | 1982 |
|
SU1093534A1 |
| Механическая рука промышленного робота | 1984 |
|
SU1220786A1 |
| Механическая рука промышленного робота | 1984 |
|
SU1220784A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Промышленный робот | 1983 |
|
SU1142270A1 |
| Манипулятор | 1987 |
|
SU1430258A1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| Стан холодной прокатки труб | 1986 |
|
SU1338911A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Механическая рука промышленного робота | 1982 |
|
SU1093534A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
