(54) МЕХАНИЧЕСКАЯ РУКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Механическая рука | 1980 |
|
SU946917A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука | 1980 |
|
SU901044A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| Механическая рука | 1978 |
|
SU828550A1 |
| Механическая рука | 1978 |
|
SU726762A1 |
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
1
Изобретение относится к машиностроению и предназначено для усовершенствования манипуляторов, используемых для работы в «горячих камерах, а также для механизации и автоматизации основных и вспомогательных операций в промышленности.
Известна механическая рука, содержащая основание, шарнирно соединенные звенья, приводы звеньев, установленные на основании пружинно-уравновешиваюш,ие механизмы компенсации веса звеньев и смонтированные на звеньях кинематические цепи, связываюш.ие звенья руки с пружинноуравновешивающими механизмами 1.
Однако в известной конструкции уравновешиваются статические моменты только цепочек последовательно соединенных звеньев, оси которых имеют горизонтальное положение, при этом ось первого от основания звена всегда вертикальна.
С целью минимизации нагрузок на элементы привода и элементы кинематических передач и обеспечения максимальной грузоподъемности механической руки в известных конструкциях, рабочие зоны располагаются в основном над или под точкой подвеса руки. Однако вертикальное расположение оси первого шарнира приводит к тому, что вдоль оси этого шарнира, т.е. в центре оптимальных зон рабочего пространства, располагаются зоны особых конфигураций ру ки; в этих зонах ограничены управляемость руки, перемещение запястью, ограничены возможности очувствления.
Целью изобретения является обеспечение максимальной грузоподъемности и улуч10 шения управляемости путем уменьшения нагрузок на элементы привода и элементы кинематических передач.
Эта цель достигается тем, что механическая рука, содержащая основание, щарнирно-соединенные звенья, приводы звеньев, установленные на основании два основных пружинно-уравновешивающих механизма компенсации веса звеньев, связанные кинематическими цепями со звеньями руки, снабжена дополнительно тремя пружинно20 уравновешивающими механизмами и двумя установленными на основании механическими сумматорами, выполненными в виде дифференциалов, при этом один из входов каждого дифференциала связан кинематической цепью с первым звеном руки и с одним из основных пружинно-уравновешивающих механизмов, второй ввод одного из дифференциалов связан кинематической цепью с вторым звеном руки и с другим основным пружинно-уравновешивающим механизмом, а второй вход другого из дифференциалов - с третьим звеном руки и с оДним из дополнительных пружинно-уравновешивающих механизмов, а выходы этих дифференциалов - с другими двумя дополнительными пружинно-уравновешивающими механизмами, причем первое звено расположено в горизонтальной плоскости.
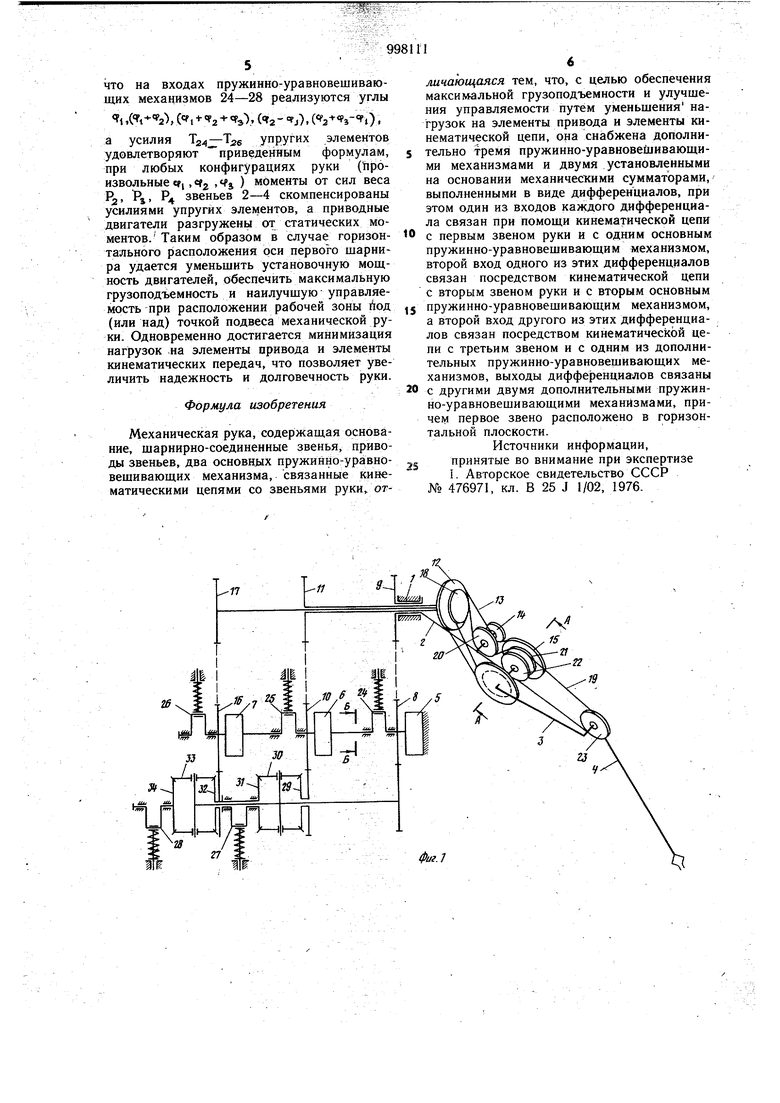
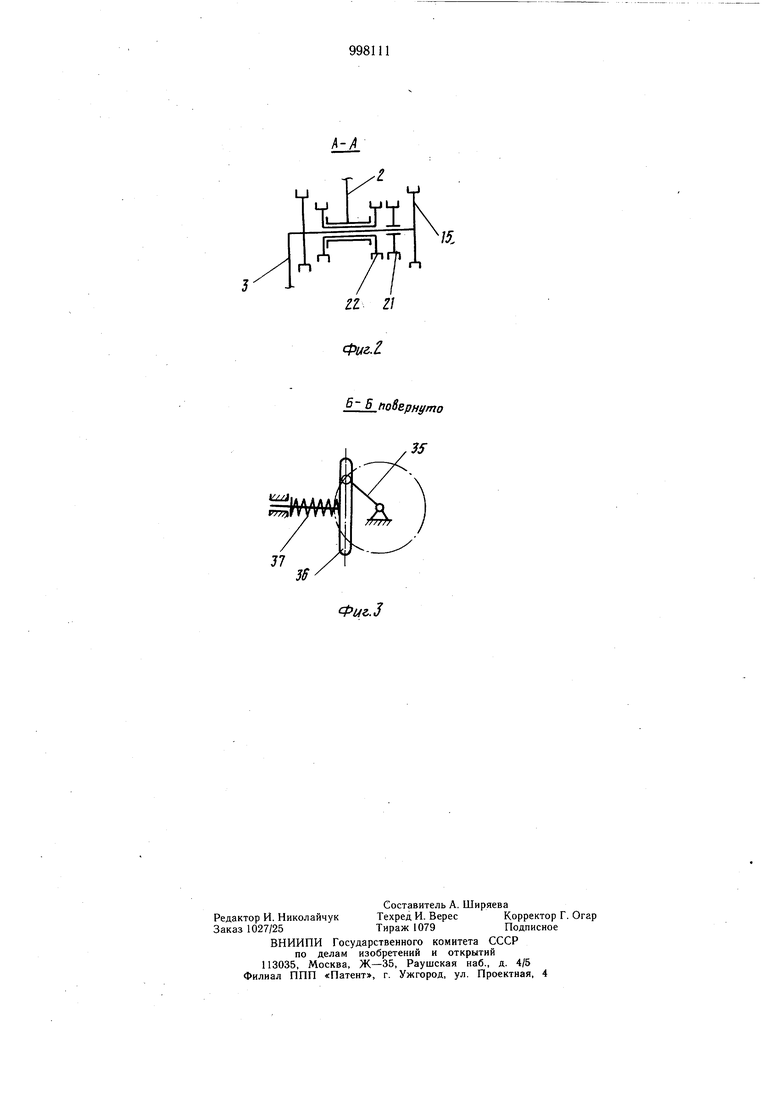
На фиг. 1 приведена кинематическая схема механической -руки; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 сучение Б-Б на фиг. 1.
Механическая рука содержит основание (звено) 1, к которому посредством шарнира с горизонтальной осью крепятся последовательно соединенные звенья 2, 3 и 4.
Шарниры, соединяющие звенья 2 и 3, 3 и 4, имеют параллельные оси, перпендикулярные оси вращения звена 2. Угол наклона этих осей к горизонту зависит от конфигурации руки.
Приводы 5-7 звеньев установлены на основании 1 и посредством кинематических зубчатых и тросовых передач связаны со звеньями 2-4 соответственно, при этом привод 5 зубчатой передачей 8, 9 кинематически связан со з-веном 2, привод 6 зубчатой передачей 10, 11 и тросовой передачей, содержащей ведущий ролик 12, трос 13, направляющий ролик 14 и ведомый (двойной) ролик 15, укрепленный на звене 3, кинематически связан со звеном 3, а привод 7 передачей 16, 17 и тросовой передачей, содержащей ведущий ролик 18, трос 19, направляющие одинарные ролики 20 и 21 и двойной 22,, установленные с возможностью вращения относительно звеньев 2 и 3 и ведомого ролика 23, укрепленного на звене 4, кинематически связан со звеном 4. При этом концы троса 19 жестко закреплены на двойном ролике 22. Эти же передачи образуют кинематические цепи, связывающие подвижные звенья 2-4 с пружинно-уравновещивающими механизмами 24-26. Кроме того, на основании 1 установлены пружинно-уравновещивающие механизмы 27 и 28 и два механических сумматор-дифференциала, состоящие из звеньев 29-31 и 32-34 соответственно. Вход 29 первого дифференциала кинематически связан с пружинно-уравновещивающим механизмом 25, вход 32 второго дифференциала - с пружинно-уравновещивающим механизмом 26, вторые входы 30 и 33 дифференциалов связаны с пружинно-уравновешивающим. механизмом 24. Третьи выходы 31 и 34 дифференциалов связаны с пружинио-уравновещивающими механизмами 27 и- 28 соответственно.
В приведенной конструкции каждый из пружинно-уравновещивающих механизмов выполнен в виде синусного механизма с упругим элементом. Так, пружинно-уравновешивающий механизм 25 содержит кривошип 35, кулису 36 и упругий элемент 37. Такое исполнение пружинно-уравновешивающего механизма в данной конструкции не принципиально, могут быть использованы другие конструкции пружинно-уравновешивающих механизмов.
В приведенной на фиг. 2 схеме уравновещиваются три звена 2-4. Мо.менты, действующие в шарнирах между звеньями 1 и 2, 2 и 3, 3 и 4 от оси веса Р,, Pj и Р, определяют формулами
4 smC r - Tg+Tj) i
M.-4(P4+) )(У2-У1)1; P4-| -fsi(fi ) -(Тз +f) ,f2)- , -РЗxlgSm , ,
где 2 4-длины звеньев 2, 3 и 4 соответственно;
«),42, поворотов звена 2 относительно основания 1, звена 3 относительно звена 2, звена 4 относительно звена 3 соответственно.
Кинематическая схема уразновешивающего механизма (фиг. 3) построена в соответствии с этими формулами с учетом того, что упругие элементы (например, элемент 37) бладают низкой жесткостью.
На входах пружинно-уравновешивающих механиз.мов 24-28 реализуются углы
)).), (, соответственно.
Усилия упругих элементов пружинноуравновешивающих механизмов 24-28 выбираются с учетом следующих соотношений:
(p,.P,.j.,)ts.
25 27:п
21
т -т - Т2б-Тгв-,
где -длина кривощипа (например, 35) синусного механизма.
Как видно из этих формул, при 12 О (отсутствие эксцентриситета оси первых двух щарниров пересекаются) пружинноуравновешивающий механизм 24 не нужен.
Механическая рука работает следующим образом.
При вращении приводов 5-7 движение через зубчатые передачи 8 и 9, 10 и 11, 16 и 17, соответственно, передается звену 2 и тросам 13 и 19, которые осуществляют перемещение звеньев 3 и 4. В связи с тем. что на входах пружинно-уравновешивающих механизмов 24-28 реализуются углы i , (f 1 - ч 2 f Чэ). («Га - j), № j-4Pi), а усилия упругих элементов удовлетворяют приведенным формулам, при любых конфигурациях руки (произвольные ч 1, «Гг ) моменты от сил веса F, Pj, Р звеньев 2-4 скомпенсированы усилиями упругих элементов, а приводные двигатели разгружены от статических моментов. Таким образом в случае горизонтального расположения оси первого шарнира удается уменьшить установочную мощность двигателей, обеспечить максимальную грузоподъемность и наилучшую управляемость при расположении рабочей зоны йод (или над) точкой подвеса механической руки. Одновременно достигается минимизация нагрузок на элементы привода и элементы кинематических передач, что позволяет увеличить надежность и долговечность руки. Формула изобретения Механическая рука, содержащая основание, шарнирно-соединенные звенья, приводы звеньев, два основных пружинно-уравновешивающих механизма, связанные кинематическими цепями со звеньями руки,, отличающаяся тем, что, с целью обеспечения максимальной грузоподъемности и улучшения управляемости путем уменьшения нагрузок на элементы привода и элементы кинематической цепи, она снабжена дополнительно тремя пружинно-уравновешивающими механизмами и двумя установленными на основании механическими сумматорами, выполненными в виде дифференциалов, при этом один из входов каждого дифференциала связан при помощи кинематической цепи с первым звеном руки и с одним основным пружинно-уравновешивающим механизмом, второй вход одного из этих дифференциалов связан посредством кинематической цепи с вторым звеном руки и с вторым основным пружинно-уравновешивающим механизмом, а второй вход другого из этих дифференциалов связан посредством кинематической цепи с третьим звеном и с одним из дополнительных пружинно-уравновещивающих механизмов, выходы дифференциалов связаны с другими двумя дополнительными пружинно-уравновешивающими механизмами, причем первое звено расположено в горизонтальной плоскости. Источники информации, принятые во внимание при экспертизе i. Авторское свидетельство СССР № 476971, кл. В 25 J 1/02, 1976.
2ff
J9
f
фиг. 7
Ujri
V5:
